如果需要进行工件坐标系的零点偏置设定,应将机床操作面板上的存储器保护开关置OFF位置,取消存储器保护功能。2)按软功能键〖工件坐标系〗,LCD将显示图8.3-3所示的工件坐标系零点偏置页面。7)重复以上步骤3)~6),完成工件坐标系零点偏置设定。图8.3-4 工件坐标系的测量输入例3)选择MDI方式、按MDI面板的功能键显示偏置/设定页面。6)按软功能键〖测量〗,Z轴在工件坐标系上的位置即被确定。......
2023-06-25
GPS输出的位置数据就是这个坐标系下的数据。
上面这句话复杂一点解释就是:GPS单点定位的坐标以及相对定位中解算的基线向量属于WGS-84大地坐标系。
X轴指向BIH(国际时间服务机构)1984.0定义的零子午面(Greenwich)和协议地球极(CTP)赤道的交点。Z轴指向CTP方向。Y轴与X,Z轴构成右手坐标系
什么“BIH1984.0”,很麻烦有没有?一句话理解:把ECEF用在GPS中就是WGS-84坐标系。
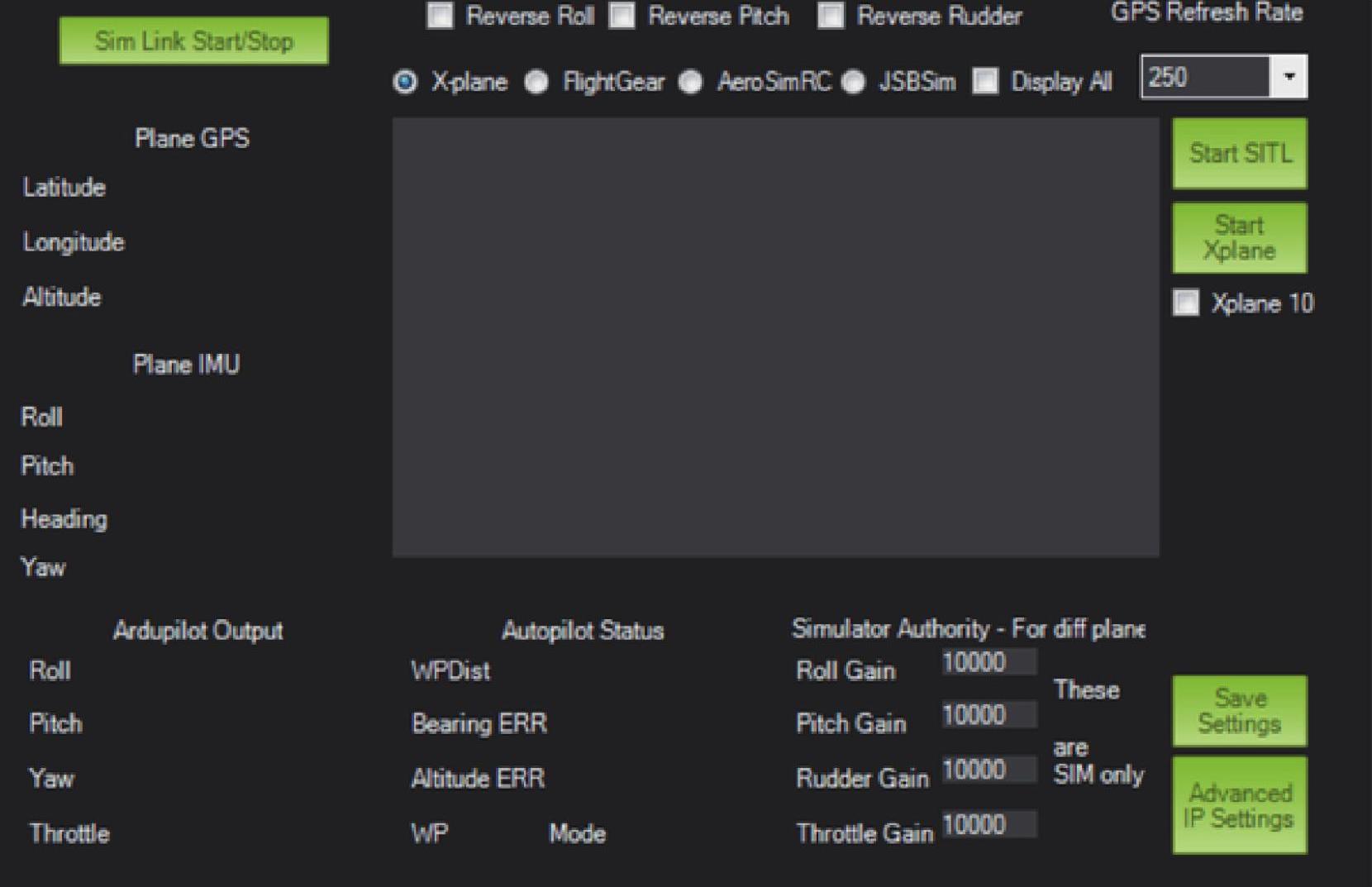
图6.4 3DR missionp lanner无人机地面控制站中GPS数据部分截图
图6.4中大家很容易看出GPS输出的常见定位数据:经度(Longitude),纬度(Lati-tude),海拔(altitude)。前面章节中提到过这样一个问题:为什么有了GPS输出的海拔高度,我们还是要用气压计或其他硬件辅助定高呢?为什么GPS的海拔数据精度没有办法支撑无人机高度定位呢?
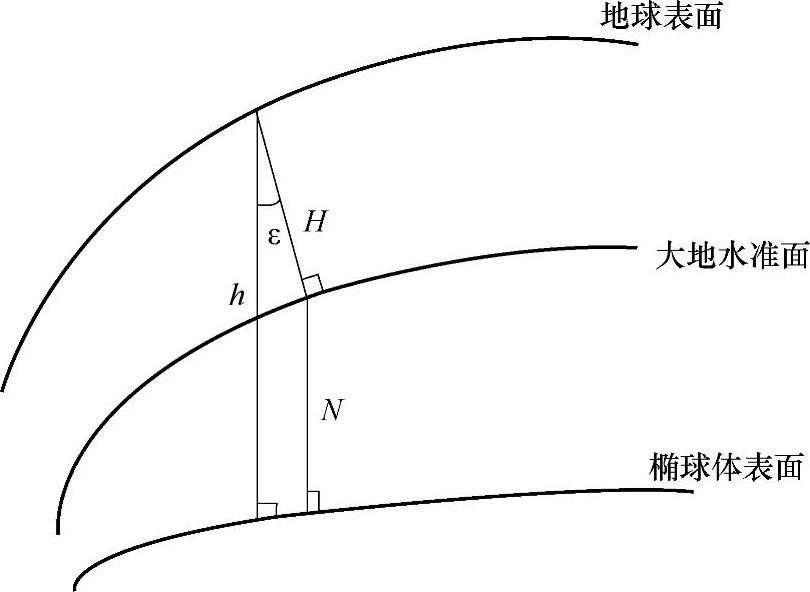
图6.5 地球表面、大地水准面、椭球体表面并不是同一概念,它们在某个层面上体现出了科学中普遍性与具体情况,人之标准与实际情况间的误差(图片来源:参考文献[3])
答案就在数据的名称上:“海拔”。因为GPS输出的信息是相对于WGS-84坐标系,我们可以把它看作一个参考椭球体,GPS输出的高度是垂直于椭球表面的高度,不是相对于海平面(Mean Sea Level)的高度。图6.5中h是GPS测得的相对于椭球表面的高度;H表示正高;N表示大地水准偏差,它随着地球重力分布变化,因此很难确定具体数值。
有关城堡里学无人机:原理、系统与实现的文章

如果需要进行工件坐标系的零点偏置设定,应将机床操作面板上的存储器保护开关置OFF位置,取消存储器保护功能。2)按软功能键〖工件坐标系〗,LCD将显示图8.3-3所示的工件坐标系零点偏置页面。7)重复以上步骤3)~6),完成工件坐标系零点偏置设定。图8.3-4 工件坐标系的测量输入例3)选择MDI方式、按MDI面板的功能键显示偏置/设定页面。6)按软功能键〖测量〗,Z轴在工件坐标系上的位置即被确定。......
2023-06-25

有了带号面积,就可以引入面积坐标了。在式中,若S>0,便称为右手坐标系,S<0称为左手系。这时,便叫做M=的齐次面积坐标。这样,面积坐标实际上包括了重心坐标、仿射坐标、直角坐标等多种坐标。在面积坐标系里推出一个公式来,马上可以变换成在其他坐标系里的公式。从式中消去参数λ,得这就是M、M1、M2三点共线的条件,也可以看成M的面积坐标所满足的直线方程式。这就是面积坐标系或重心坐标系里直线方程式的一般形式。......
2023-10-17

模型的创建与定义、模型的分析以及修正是使用Simulink的三大步骤,图10-3显示了典型的Simulink工作框图。图10-3 Simulink操作框图Simulink具有相对独立的功能和使用方法,它支持线性和非线性系统、连续和离散时间系统,而且系统可以多进程。进行Simulink仿真的主要步骤如下:1)运行Simulink:在MATLAB命令窗口中直接键入Simulink并回车就会显示图10-2的Simulink启动界面。......
2023-06-23

◆ UG NX 10.0的部件文件可以包含多个坐标系,但是其中只有一个是WCS。系统用XC、YC和ZC表示工作坐标系的坐标。工作坐标系的XC-YC平面称为工作平面。图4.1.1 工作坐标系图4.1.2 基准坐标系◆ 旋转的右手定则。例如,在图4.1.4中,如果要确定当前坐标系的旋转逆时针方向,那么拇指就应该与ZC轴对齐,并指向其正方向,此时逆时针方向即为四指从XC轴正方向向YC轴正方向旋转。......
2023-10-17

随着国际技术合作、技术交流的不断增加,有必要对第三角画法作一简单介绍。图12—31第三角画法4)投影识别符号图12—32投影识别符号由于我国一般不采用第三角画法,所以只有在必要时才允许使用第三角画法。采用第三角画法时,必须在图纸上画出相应的投影识别符号,以避免引起误解。第一角画法和第三角画法的识别符号见图12—32,这是国际标准中规定的统一符号。......
2023-09-24
图5-41和图5-42分别是富奇凡公司生产的MAM型和PAM型生物打印机。图5-40 Organovo NovoGen MMX生物打印机图5-41 富奇凡公司MAM型生物打印机本章参考文献[47]详细描述了一种PAM型微注射器式生物打印机的结构和主要技术参数。图5-42 富奇凡公司PAM型生物打印机图5-43 PAM型微注射器式生物打印机结构图5-44是用PAM型微注射器式生物打印机打印小直径血管的过程[48]:①设计血管模型,其中,1为琼脂糖柱,2为小直径的多细胞柱。图5-46是一种喷墨式生物打印机,它采用压电式喷头。......
2023-06-15
一般来说,根据光电编码器产生脉冲的方式的不同,可以分为增量式、绝对式以及复合式三大类。生产线上常采用的是增量式光电编码器。增量式光电编码器其结构是由光栅盘和光电检测装置组成的。图2-16光电编码器原理示意图光电编码器的码盘条纹决定了传感器的最小分辨角度。图2-17增量式编码器输出脉冲示意图计算工件在传送带上的位置时,需确定每两个脉冲之间的距离即脉冲当量。......
2023-06-15

对于C51的变量,我们强调3个概念:变量名、变量值和变量所在的地址。变量值是一个变量的内容,如C51指令“ch1=0x12;”就是将数值0x12赋值给变量ch1,该指令执行后,变量ch1的变量值就是0x12。对MCS-51系列单片机,以单片机的片内RAM单元为例,我们强调了3个概念:片内RAM单元的内容、片内RAM单元的名字和片内RAM单元的地址。指针变量的值是指针(地址)。......
2023-11-17
相关推荐