数学模型是深入研究无人机系统的基础,它至少可以在两方面为我们提供帮助:①数学模型能够将整个系统以精确量化的方式呈现在我们面前;②数学系统能够揭示出无人机系统中“肉眼”看不到的内在性质。举例来说,多旋翼无人机定距桨旋转产生升力是实际系统的真实运动表现。这些任务的要求在本质上需要设计人员能够对无人机系统各部分及内部关系等进行量化描述,并根据明确的指标求出精确设计参数值。......
2023-07-05

图5.35 3508-380KV无刷电动机
常用的动力器件及具体组成根据无人机机型的不同而有很大区别。比如固定翼型无人机采用伺服舵机控制副翼、升降舵等变化;直升机型无人机采用舵机控制自动倾斜器,最终实现对主旋翼总距、周期变距的控制;涵道无人机通过伺服电动机控制导流板,引导旋翼推送气流来实现姿态控制。而多旋翼无人机则采用无刷电动机驱动定距桨,为无人机提供所需要的升力或姿态控制力矩。
不仅是无人机系统,很多硬件系统中具体的硬件信息都可以直接通过“说明文档”或者对应的“使用手册”获取。(请思考问题:还有哪些硬件手册是你经常使用的?你对于这些手册的阅读习惯是怎样的?)这些手册内容可以作为制作或设计时的参考资料,也可以提示我们哪些数据对于该种硬件而言是最为重要的,这对无人机的制作、设计、研究会起到一定的指导作用。对于有经验的工程师而言,几乎可以通过这些手册获取所有必要的知识,因此养成手册阅读习惯,并逐渐适应、培养阅读手册的能力,这对于任何领域的硬件工程师而言都是非常重要的。
关于多旋翼无人机使用的无刷电动机,我们应该关注哪些参数呢?其实电动机厂家已经为使用者考虑得很周全了。
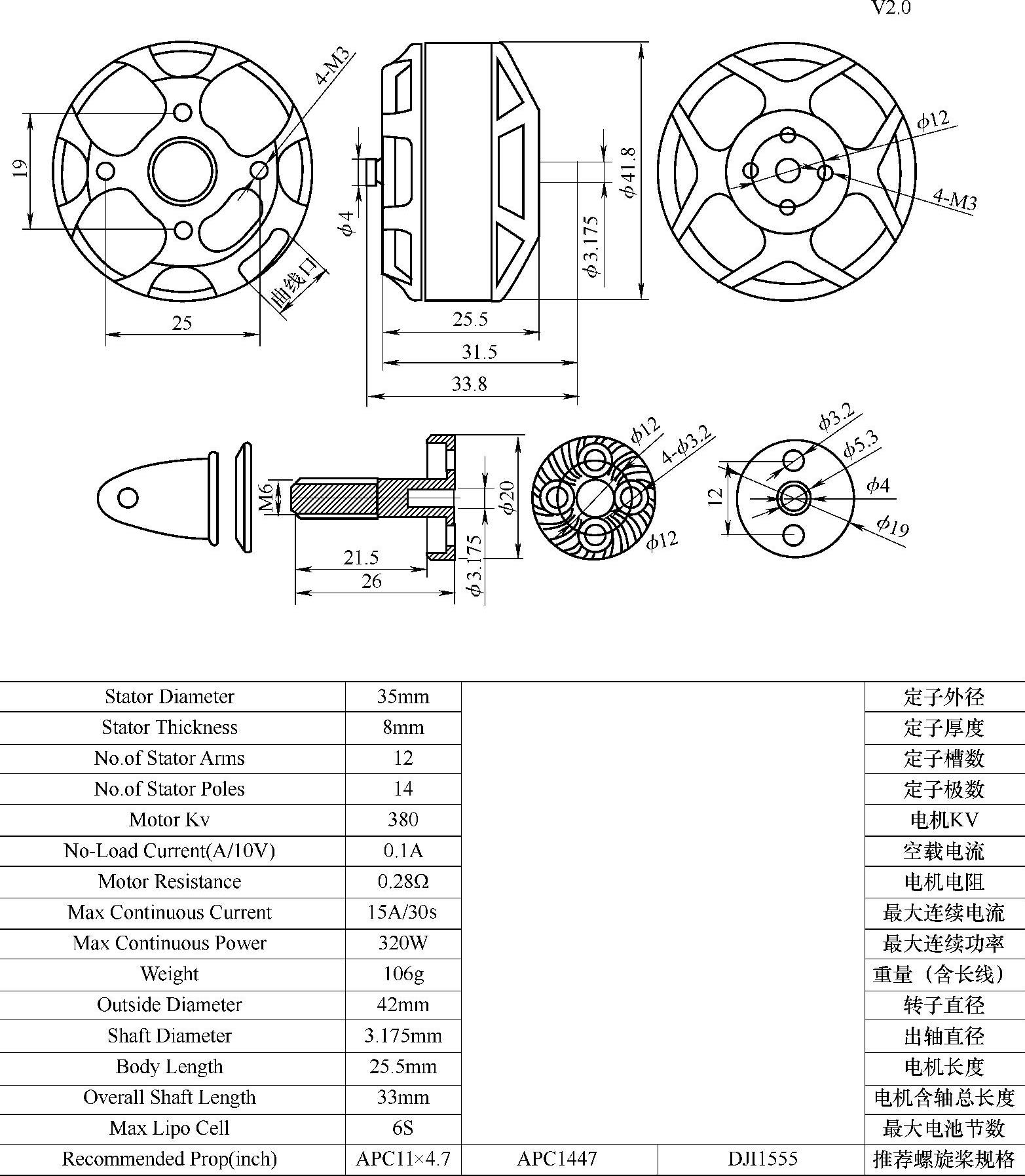
图5.36 朗宇Sunnysky3508-380KV型无刷直流电动机的尺寸结构图和参数表(图片来源:rcsunnysky.com)
城堡会以图5.37中的无刷电动机参数为例,跟大家分享如何使用这些信息,或挖掘出更多的内容,其中的方法比某一个具体项目的实现更为重要。
首先来看看有哪些需要重点关注的参数
1)电动机型号:3508
在选择多旋翼无人机使用的无刷电动机时,型号参数是很多读者遇到的第一个问题,与网络卖家联系也需要用专业词语进行沟通,如果读不懂型号,是一件很麻烦的事情。以3508为例,眼尖的读者可以从参数列表中看到“定子外径:35mm”,“定子厚度:8mm”,连起来就是3508。其实就是这么简单,电动机的型号通常是按照定子尺寸命名的。
2)KV值:380KV
喜欢航模的朋友对“千伏值”这个词一定不会陌生,“千伏值”对应的参数名称就是KV值,它的含义是指无刷电动机外加1V电压时,每分钟的空转转速。以380KV为例,外加1V电压电动机空转速度为380rpm。对于无刷电动机而言该参数值越低,能驱动的定距桨尺寸也就越大。
3)推荐螺旋桨规格
对于爱好者或无人机使用者而言,电动机厂商提供的这项数据会给整个设计省去相当多的麻烦。由厂家提供的参数基本上是值得信赖的(就算有些厂家偷懒,也会照搬比较靠谱的数据加在自己的产品手册表格中),因此从上面的参数列表中,大家可以直接选择与3508-380KV无刷电动机相匹配的推荐旋翼尺寸:APC1147,APC1447,DJI1555。(请思考问题:这些参数在你的项目或工程中如何使用?其中哪些参数需要特别注意?)
有关城堡里学无人机:原理、系统与实现的文章

数学模型是深入研究无人机系统的基础,它至少可以在两方面为我们提供帮助:①数学模型能够将整个系统以精确量化的方式呈现在我们面前;②数学系统能够揭示出无人机系统中“肉眼”看不到的内在性质。举例来说,多旋翼无人机定距桨旋转产生升力是实际系统的真实运动表现。这些任务的要求在本质上需要设计人员能够对无人机系统各部分及内部关系等进行量化描述,并根据明确的指标求出精确设计参数值。......
2023-07-05

读者需要一些额外信息才能够精确描述无人机的飞行状态,这正是本节将介绍的内容:无人机姿态。)多旋翼无人机的姿态可以通过机体坐标系和NED坐标系之间的关系来定义。在机型介绍中,大家已经了解了多旋翼无人机在实际操作中的姿态控制方式。......
2023-07-05

图5.47 不同起落架在高度,材料,形状等方面区别很大,而这些区别会对无人机起飞、降落造成影响机架对于搭载了外置有效负载的多旋翼无人机而言是非常必要的。多旋翼无人机的起落架可以分为两大类,一类具备自动收放功能,另一类则只能在起飞前、后进行折叠、拆卸或一直保持机架下放的状态。与折叠旋翼臂情况类似,如果读者的无人机起落架具备可折叠功能,务必在起飞前认真检查。具备自动收起功能的起落架可以有效避免这个问题。......
2023-07-05

对无人机旋翼的选择往往是项目需求进行实现的第一步。1)定距桨图5.33 1447与1047定距桨多旋翼无人机往往使用定距桨,定距桨的含义是桨距固定的旋翼,旋翼的升力计算与旋翼桨距有关系。它将旋翼相关参数简化为比例系数,对于长期从事设计的工程师或者现场操作人员而言,可以在无人机飞行现场快速计算无人机升力无疑是非常有利的。......
2023-07-05
图4.22 鱼鹰运输机的三种飞行方式V-22为倾转旋翼式结构,具备三种典型飞行模式:直升机飞行模式、倾转过渡模式、飞机模式。V-22的两个旋翼并不是采用多旋翼飞行器惯用的定距桨,而是类似直升机主旋翼,具备挥舞铰与变距铰的变距桨。因此整体上来看,V-22具备多种飞行模式,旋翼结构与直升机相近。......
2023-07-05

飞行器携带小铁板M1从示高线h1、h2间飞向B区,并在空中将小铁板M1投放到B区中心;飞行器从示高线h1、h2间飞回A区,在A区中心降落并停机。......
2023-06-23

同时旋翼臂是无人机的主要空间占用模块。图5.46 任何使用具备旋翼臂折叠功能无人机的读者都有必要在起飞前进行认真检查正因消费级无人机与行业级无人机都对便携性有一定要求,旋翼臂的折叠功能也自然而然地成为很多厂家在产品中标榜的卖点。飞前检查习惯的养成对于无人机行业的任何参与者而言都是非常必要的,尤其是旋翼臂采用折叠设计的情况。......
2023-07-05

对于四旋翼无人机而言,升力和姿态变化都靠旋翼的旋转提供,这意味着旋翼不止需要提供悬停时与重力平衡的拉力,还必须能够为飞行或机动提供足够动力。整个动力部分的效率要看做一个整体,因此当求得无人机旋翼需要的最大拉力值和常用拉力值后还要结合电动机进行选择。电动机型号:详细内容可见5.5节,一般包含电动机尺寸数据,KV值等参数。在进行旋翼与电动机选择时,应当使旋翼的常用拉力数值对应尽量高的力效值。......
2023-07-05
相关推荐