塑料助剂在树脂中的分散形式主要有五种,不同形式具有不同的改性效果。这是一种最常见的分散结构,助剂随机分散在树脂基体中,呈不规则状,有人称之为“海岛”状分布。这种分散结构为助剂以层状分散于树脂中,助剂和树脂都为连续相,复合材料呈两相同性形态。这种分散结构为助剂以大块状与树脂连结在一起,树脂和助剂都为不连续相。如粉状助剂与树脂用烧结方式成型有可能获得此类结构。......
2025-09-29
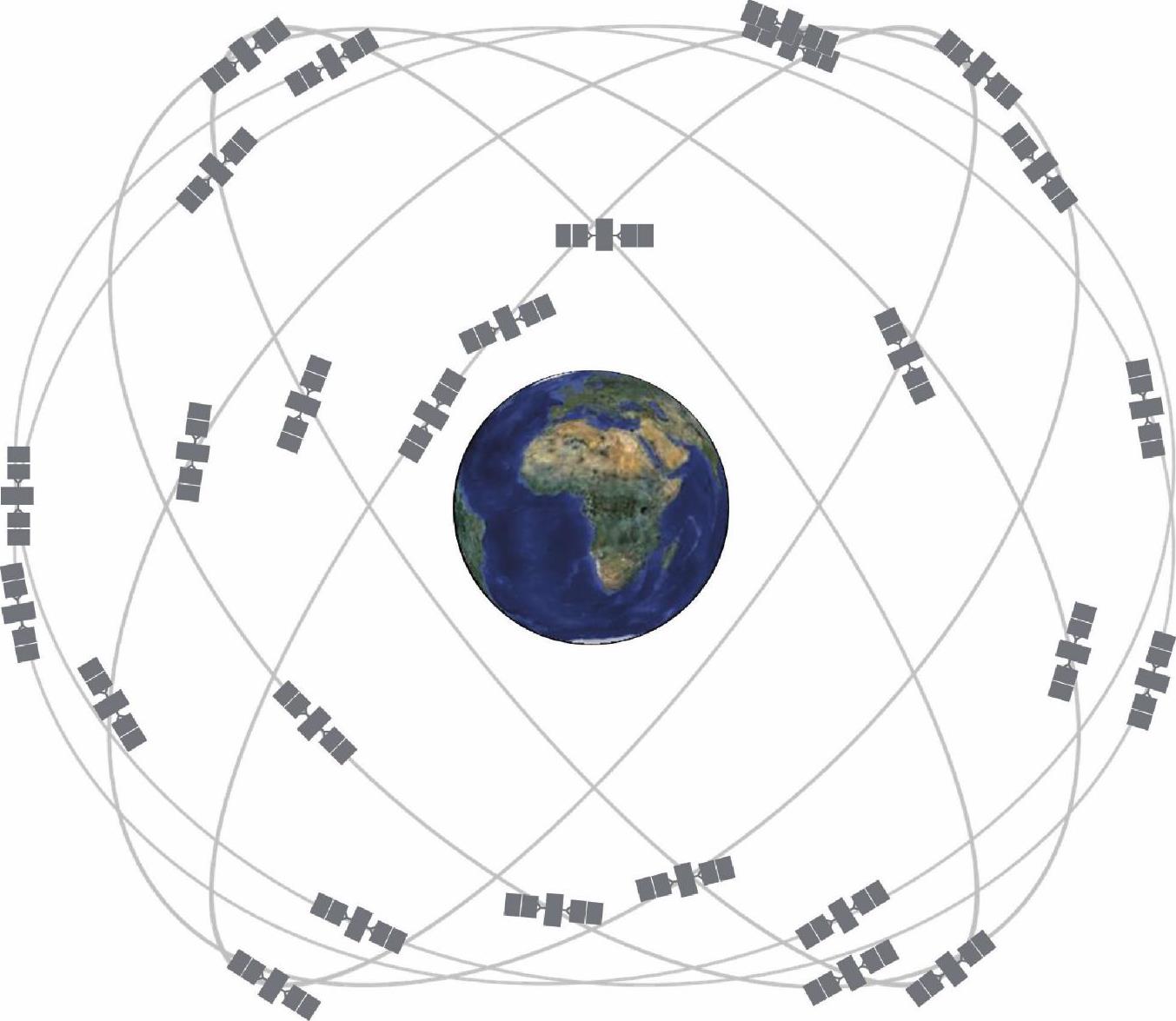
图5.31 GPS系统中的24颗卫星(图片来源:gps.gov)
获取绝对位置状态信息的主要途径是卫星定位系统,在无人机领域常用的几大卫星定位系统包括美国的GPS,全称NAVSTAR GPS(Navigation Satellite Timingand Ranging Global Posi-tion System);俄罗斯的GLONASS;我国的北斗卫星定位系统。此外,世界上的卫星定位系统还包括欧洲的伽利略系统,日本的准天顶系统,印度的IRNSS等。
卫星定位系统给无人机提供的不仅是三个绝对位置状态信息:经度、维度、高度信息,还包括无人机在当下的三个速度状态向量。而位置与速度是任何运动系统最核心的两类状态信息,整个运动过程都是围绕它们展开的,由此可见卫星定位系统在无人机反馈模块中的重要地位。卫星定位系统在无人机使用上会面对两个问题,一是信号强度,二是定位精度。
任何无人机产品,在正常使用时都需要满足“星数”要求,同时在室内,高架桥下或其他特殊环境中,卫星信号可能会变得非常弱,而由于位置状态和速度状态实在是太重要,一旦无人机丢失掉这两类状态信息,马上会无法控制,而无人机运动速度非常快,根本无法承受哪怕很短暂的外环状态缺失。因此无人机系统的卫星定位硬件往往会在设计上进行多余度准备,如某些卫星定位硬件既支持GPS,也支持GLONASS、北斗系统等,或者同时支持多个频段的卫星信号接收,这就使得在某些情况中,某一种卫星定位系统的某种信号微弱到无法使用时,定位系统可以迅速切换或者直接检测到其他定位系统的信号,保证整个系统持续反馈状态信息。
如果所有卫星定位系统的所有信号都丢失了呢?这种情况在很多行业应用中是无法忽视的存在。在此种情况下无人机必须借助其他辅助传感器,通过相对位置,相对速度来反馈状态信息,实现位置与速度的控制。比如当无人机从室外切入到室内飞行时,卫星定位信号全部丢失,这时就要借助之前提到的相对测距传感器来进行悬停或其他要求下的状态控制。然而当下还没有一种相对定位技术能够完全取代卫星定位技术,这些硬件或者算法在精度与稳定性,实现方式上还有非常大的提升空间。
 (https://www.chuimin.cn)
(https://www.chuimin.cn)
图5.32 得益于硬件小型化与低成本,卫星导航已走进普通人的日常生活。上图为集成了卫星导航模块u-blox NEO-M8与强磁计的常见无人机导航单元
在定位精度方面,以GPS为例,由于定位精度太高,在民用领域被加入人为限制,现在开阔地域的定位精度基本可以保持误差在5m左右。这个定位精度加上无人机本身控制器中的滤波与控制算法处理,机械云台稳定控制,基本满足消费产品的使用需求。但在工业领域更高精度的要求下,还可以通过使用差分GPS(DGPS)技术实现更高精度的无人机定位。
但是大家可能会有一个疑问,既然GPS系统能够提供载体的三维数据(经度、纬度、高度),为什么在无人机定高时还要使用气压计、超声波、红外等辅助系统呢?相比于其他两个方向的定位而言,无人机系统的高度定位很“漂”,这是为什么呢?
其实普通的GPS高度定位是非常不可靠的,本质上是由于GPS所测得的数据和坐标系之间的关系。GPS系统可以通过数据转换获取经度纬度,而在地球表面经度纬度的标定是统一的,但高度该怎么算呢?海拔,确实如此,海拔是相对于海平面的高度,但它对于整个地球并不是统一分布的。因此需要结合相对定位数据来直接获取无人机所在位置的海拔高度(气压计)和相对地面高度(超声波、红外等),详细内容会在下一章第二节坐标系数据转换中进行论述。
对于爱好者而言最需要注意是在放飞无人机前对环境进行详细排险与规划,分析飞行环境中可能会给GNSS系统带来影响的因素,并进行有针对性的方案制定。在安装无人机时尤其注意安装操作、布局、整体设计中GNSS信号的强弱。
相关文章

塑料助剂在树脂中的分散形式主要有五种,不同形式具有不同的改性效果。这是一种最常见的分散结构,助剂随机分散在树脂基体中,呈不规则状,有人称之为“海岛”状分布。这种分散结构为助剂以层状分散于树脂中,助剂和树脂都为连续相,复合材料呈两相同性形态。这种分散结构为助剂以大块状与树脂连结在一起,树脂和助剂都为不连续相。如粉状助剂与树脂用烧结方式成型有可能获得此类结构。......
2025-09-29

1)建筑单向线性的物质流动以往对建筑全生命周期的物质流研究都是基于单向线性模式,即“资源—产品—污染物”的过程。在这种模式下,建筑全生命周期的物质流是从自然资源中获得原材料,经过加工生产形成建筑材料,后用于建筑的建造。2)建筑循环的物质流动物质循环系统是一个“资源—产品—再生资源”的过程,实现物质的不断循环利用。......
2025-09-29

固体废弃物主要包括磨屑、磨料粉尘等,液体废弃物主要是磨削液,气体废弃物主要是磨削液的烟雾、蒸汽,这些废弃物对人体和环境危害很大。在磨削加工时,含机械杂质较多的磨削液,不能用于磨削加工,必须给予净化处理才能继续使用。磨削液用水稀释后,通过加工工件、工作环境以及操作人员的手、周围空气等方式会对稀释液造成污染,所带入的微生物便开始繁殖,从而导致磨削液的腐败与劣化。......
2025-09-29

是一个关键问题,起码需要知道它与参考方向之间的相对关系,从而让无人机计算出应有的朝向,这时就要用到无人机系统中的电子罗盘:强磁计。)强磁计指明航向的原理非常简单,该模块在使用上也很容易,但却是无人机系统最大的“麻烦”所在,而这些麻烦是由强磁计本身的特点导致的。因此在无人机设计过程中,应尽量保持强磁计远离其他电子元件。而直升机型无人机经常把强磁计固定在离尾桨较近的部分,远离机身主体。......
2025-09-29

但为了保证电路的每一条时序路径,特别是输入/输出路径延迟约束的精确性,我们还应该提供设计的环境属性,如图6.23所示。图6.23 环境约束每一个逻辑器件的延迟都与这个器件的输出负载和输入转换时间相关,其输出转换时间也与这个器件的输出负载和输入转换时间相关。我们可以用setload指定外部电容负载为一常数值,如图6.24所示。图6.25 指定实际器件负载图6.26 指定驱动器件如上文所述,在实际设计中,由于电路比较大,需要对设计进行划分。......
2025-09-29

前面介绍了转速反馈控制直流调速系统的原理,实际调速系统控制器的组成是随电子技术的不断发展而更新的。图1.26所示是由运算放大器组成的转速调节器控制的转速负反馈直流调速系统。表1.4 运算放大器组成的调节器参数2.电流截止负反馈环节调速系统引入转速负反馈控制后,转速偏差被减小或消除,系统的调速性能和调速范围有很大的提高,但是还存在起动和堵转时的过电流问题,影响电动机正常工作。转速调节器采用比例调节器。......
2025-09-29
阳极氧化工艺流程 钢铁在铜盐电解液中阳极氧化,所得到的氧化膜不但耐蚀,还可以根据不同的工艺得到不同颜色的膜层,使钢铁产品具有很好的装饰效果。阳极氧化溶液配方及工艺 钢铁在铜盐电解液中的阳极氧化工艺见表210。表210 钢铁在铜盐电解液中的阳极氧化工艺影响氧化膜层质量的主要因素 影响氧化膜层质量的主要因素如下:1)处理时间的影响。......
2025-09-29

“实际上在自然资源和环境治理领域,市场可以发挥重要作用,但通常难以发挥基础性作用,政府应担扮演更为重要的作用,在长期拥有集权传统的中国尤其如此。”自2000 年被称为“中国水权交易第一案”的东阳—义乌水权交易以来,水权交易市场已经逐步形成。2016 年中国水权交易所正式挂牌成立,截至2017 年底,已促成交易42 单,累计交易水量14.68 亿立方米。......
2025-09-29
相关推荐