近十几年来,在微观力学方面,纳米压痕技术受到越来越广泛的应用,主要体现在以下几个方面。图6-27为采用纳米压痕技术在硅表面施加50mN压力后形成的压痕阵列。图6-30为利用纳米压痕和显微成像技术相结合的一个典型例子。图6-31为采用材料纳米压痕技术测量Al多晶材料中一个晶粒性能的过程及力—位移曲线。Bahr[88]利用纳米压痕实验完成了低于50 nm深度的硬度测量;Adams[89]用纳米压痕实验研究了颗粒薄膜凝聚体的断裂机制。......
2023-06-20
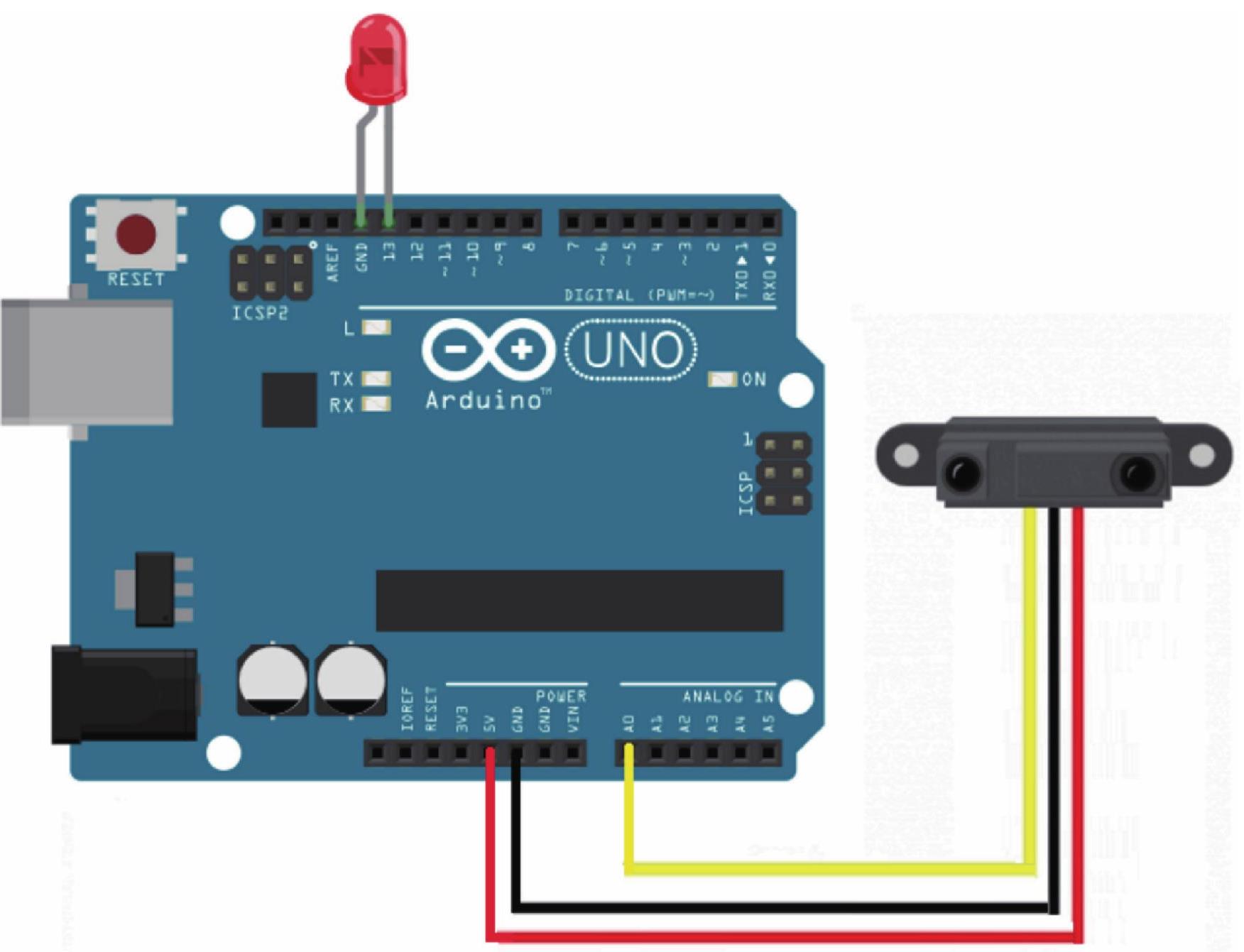
图5.28 与Arduino UNO相连的红外传感器
超声波和红外传感器(IR distance sensor)都属于测距传感器,作用是采用非接触的方式进行距离测量来获取无人机与特定对象(如地面、障碍物等、跟踪目标)之间的相对位置、相对速度。它们的名称虽然不同,实现状态反馈的途径和适用条件也有区别,但对于无人机系统而言,它们的抽象功能却是相同的。(请思考问题:超声波和红外传感器发出的波有什么区别?它们的特点是什么?如何利用这些特点?这些特点可能会带来哪些麻烦?)
超声波和红外传感器在原理上有彼此相通之处,即通过向指定方向发射,并接收特定对象返回的不同类型的“波”(前者为超声波,后者为一定波长的电磁波),并根据该种波的特性及反馈时间来计算无人机与特定对象之间的距离或无人机本身的运动速度。在不同的无人机应用领域,超声波与红外传感器常被用来进行辅助定高或壁障飞行(请思考问题:无人机GPS不提供高度数据么?),但无论是用于哪一种途径,都只能在有限距离内进行,否则就会由于散射、吸收导致测距精度降低。
通过超声波或红外传感器来进行辅助定高时,对地面环境的要求比较高,换言之,如果地面环境比较复杂,就会给超声波或红外测距带来很多干扰。以超声波定高为例,超声波为了获得足够的反馈信号需要离障碍物比较近,但当地势变化不均匀或植被高低不平时就会给无人机定高带来很大干扰,使无人机无法稳定保持与特定对象的高度,换句话来讲,相对高度误差会在特定干扰或环境中超出允许的最大“边界”。
因此在无人机系统上使用超声波、红外等相对距离传感器时,虽然不需要担心加速度计等传感器的校正问题,但是却不得不面对更多来自环境的干扰因素。
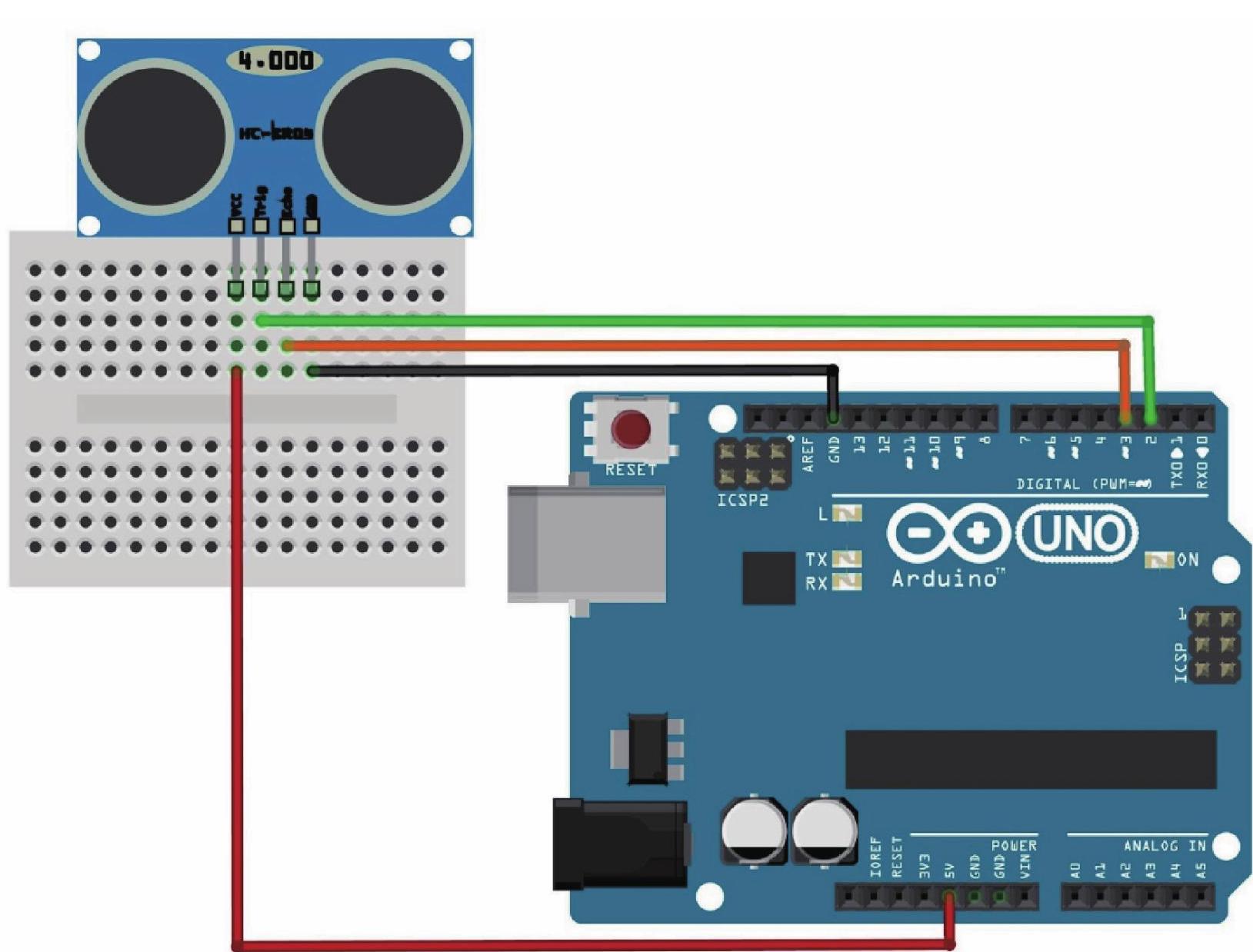
图5.29 与Arduino UNO相连的超声波测距传感器

图5.30 复杂的地面环境及其变化都会影响无人机的正常飞行,工程师必须时刻牢记无人机是在真实环境中进行运动的,这与虚拟环境有着质的区别
有关城堡里学无人机:原理、系统与实现的文章

近十几年来,在微观力学方面,纳米压痕技术受到越来越广泛的应用,主要体现在以下几个方面。图6-27为采用纳米压痕技术在硅表面施加50mN压力后形成的压痕阵列。图6-30为利用纳米压痕和显微成像技术相结合的一个典型例子。图6-31为采用材料纳米压痕技术测量Al多晶材料中一个晶粒性能的过程及力—位移曲线。Bahr[88]利用纳米压痕实验完成了低于50 nm深度的硬度测量;Adams[89]用纳米压痕实验研究了颗粒薄膜凝聚体的断裂机制。......
2023-06-20

自然界的所有物体只要温度高于绝对零度都会辐射红外线,因而,红外传感器需具有更强的发射和接收能力。红外传感器已经在现代化的生产实践中发挥着巨大作用,随着探测设备和其他部分技术的提高,红外传感器能够拥有更多的性能和更好的灵敏度。......
2023-06-26
红外摄像机主要以图像形式显示场景,大多是单色;而红外热像仪则着重温度的显示,使用彩色表示温度高低。无人机多功能吊舱图像稳定的秘密:减振器对于云台或者吊舱设备来说,减振是一大难题。减振器一般只有一个最佳工作状态,在此状态之外性能逐渐变差,甚至会增大振动。......
2023-07-23

摄像机光学镜头是由透镜组成的。因此几何光学法测量可分为聚焦法和散焦法。而基于聚焦测距和散焦测距的几何光学法,可以克服上述对焦图像测量方法的缺点。其基本原理是利用在不同光学参数下得到的两幅或三幅图像来确定散焦点扩散函数的扩散参数,根据散焦扩散参数与物体距离的关系来计算深度,这种方法称为散焦测距。......
2023-11-24

1.5.2.2 直流母线方法电网电压跌落时,DFIG的定、转子绕组中感应出很大的故障电流,转子故障电流流过直流母线电容,引起直流母线电压的波动,同时电网电压降低导致网侧变换器控制直流母线电压的能力减弱,不能及时将转子侧过剩的能量传递到电网,可能导致直流母线电压快速泵升,危害直流母线电容安全。......
2023-06-23

分析工业4.0的设计原则,发现我们面临着以下新的问题和挑战。图24.4工业4.0的设计原则1.互联互通和信息交换IOT、IOP、IOS等涉及物-物、人-人、服务-服务等之间的互联。图24.5实体的差异三维图这种差异可以从以下三个维度来分析。2)维度2●通信。但是如何实现情景感知和情景感知系统是一个巨大挑战。交换的信息也要规范化,消除异构。......
2023-10-28
谷歌是人类历史上第一个大数据驱动的精准广告服务商。大家都知道,传统广告的效果从来都没有办法准确评估,而谷歌的精准广告打破了这一桎梏。谷歌的逻辑是,通过平台被搜索的关键词来挖掘这些领域相关的潜在客户,从而为他们匹配非常精准的广告。所以,我们可以看到大数据时代商业逻辑最大的特点就是精准。所以,精准所要追求的方向,是在极度颗粒化的场景下,依然能找到具体时间点的需求,然后按需服务。......
2023-07-02

学校需要成立学分认定委员会,并建立一套学分的认定办法和管理制度,确保新课程实验顺利实施。所以,我们只有积极面对、认真研究、积极探索,勇做新课程实验的先锋。......
2024-01-31
相关推荐