位置控制式柴油喷射系统是在机械式柴油喷射系统的基础上进行电子技术改造而成,控制喷油量的实质是:控制油量调节滑套(或齿杆)的位移量;控制喷油定时的实质是:控制定时控制活塞的位移量。位置控制式柴油喷射系统虽然只能有限改善柴油机的动力性与经济性,但是,电子调速器和电子提前器在柴油机上的应用,为柴油机电子控制技术的发展奠定了基础。......
2023-09-23
作为一名中国人,应该对强磁计有种天然的熟悉感,毕竟我们引以为豪的四大发明中就包括指南针这一项。指南针是通过地磁场与系统间的作用来指示方向的,强磁计的原理与指南针非常类似,只不过指南针是被人用来辨别方向,而强磁计则被加入到反馈模块中帮助无人机或其他智能系统辨别“航向”。对于无人机而言,“向哪个方向飞?”是一个关键问题,起码需要知道它与参考方向之间的相对关系,从而让无人机计算出应有的朝向,这时就要用到无人机系统中的电子罗盘:强磁计。(请思考问题:哪些环境、因素会对磁场造成干扰?)
强磁计指明航向的原理非常简单,该模块在使用上也很容易,但却是无人机系统最大的“麻烦”所在,而这些麻烦是由强磁计本身的特点导致的。电子罗盘对于自身磁场和外部磁场环境的强烈依赖使它成了整个无人机反馈模块中最容易受到干扰的传感器。一方面,当外部磁场、变化很强烈时会使得电子罗盘无法辨别地磁场影响,反而被外部的干扰磁场左右。这种情况下就会出现有趣的“马桶效应”,导致无人机一直处于旋转状态,不能定位悬停。二来,“电生磁、磁生电”,电场与磁场之间的相互关系导致强磁计很容易受到其他带电元件的干扰。因此在无人机设计过程中,应尽量保持强磁计远离其他电子元件。
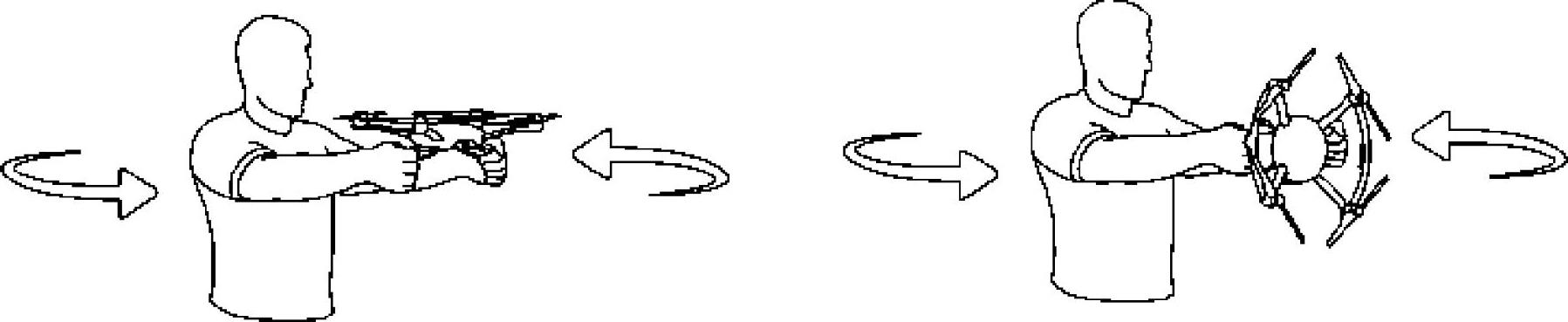
图5.27 强磁计校正“舞蹈”(图片来源:斯凯智能)
由于不同飞行环境中地磁场情况不同,理论上说每一次飞行前都需要对强磁计进行校正,而强磁计的校正方式很有趣,需要操作者使强磁计围绕三个轴进行旋转,这对于较重的无人机,或布线、安装不太考究,同时又不太具备舞蹈天赋的无人机爱好者而言是个令人头痛的问题。
强磁计这么重要,又这么容易受到干扰,难道就没有办法克服么?任何问题总能够在一定的范围内进行解决,只是不同的方案、算法以及硬件会影响实现的范围和效果。对于无人机系统而言可以采用多种方法应对,比较直接一点的就是在布局上远离干扰,惹不起躲得起,对于多旋翼无人机而言,电子罗盘常常整合在GPS模块中,远离控制板和电池系统。而直升机型无人机经常把强磁计固定在离尾桨较近的部分,远离机身主体。另外也可以采用多传感器数据融合算法对无人机航向数据进行补偿、滤波,比如通过相应的算法“辨别”干扰并针对该种情况进行“滤波”“估计”等。(请思考问题:有没有可能结合外环姿态或内环姿态来估计飞行方向?)
有关城堡里学无人机:原理、系统与实现的文章

位置控制式柴油喷射系统是在机械式柴油喷射系统的基础上进行电子技术改造而成,控制喷油量的实质是:控制油量调节滑套(或齿杆)的位移量;控制喷油定时的实质是:控制定时控制活塞的位移量。位置控制式柴油喷射系统虽然只能有限改善柴油机的动力性与经济性,但是,电子调速器和电子提前器在柴油机上的应用,为柴油机电子控制技术的发展奠定了基础。......
2023-09-23

对于爱好者而言最需要注意是在放飞无人机前对环境进行详细排险与规划,分析飞行环境中可能会给GNSS系统带来影响的因素,并进行有针对性的方案制定。在安装无人机时尤其注意安装操作、布局、整体设计中GNSS信号的强弱。......
2023-07-05

前面对同步发电机暂态过程的分析,都没有考虑电机的自动调节励磁装置的影响。下面以自动调节励磁装置中的一种继电强行励磁装置的动作原理,来分析自动调节励磁装置对短路电流的影响。以上是短路点距电源的电气距离较远,强行励磁装置动作后励磁电压达到极限值时对短路电流的影响。......
2023-06-15

图2.28 调压调速和弱磁调速稳态参数关系虽然额定功率、额定电压和额定电流是电动机长期运行不能超过的,但是额定转速有一定的上调裕量,因此,采用弱磁升速可以扩大电动机的调速范围。即在调速范围要求较大的场合采取调压调速和弱磁调速相结合的方法,在额定转速以下采用调压调速,在额定转速以上采用弱磁调速,以扩大调速范围。......
2023-06-19

图5.1 以Pixhawk开源飞控为核心的四旋翼飞行器FCS连接图无人机系统所涵盖的硬件数量本已庞大,随着任务要求的不断深入,应用领域的不断扩展,硬件种类还在持续增加。在本书中,将无人机系统硬件细分为六个部分:飞行控制系统、动力系统、被控对象、有效负载、地面系统和能量单元。有效负载对任务实现的重要性是非常直接的,同时它也影响着无人机系统功能、结构设计、机型选择、硬件组成等方方面面。......
2023-07-05

数字指南针,即电子罗盘,是利用地磁场来确定北极的一种方法。数字指南针一般是用磁阻传感器和磁通门加工而成的电子罗盘。磁阻传感器通常由磁场检测模块、数字指南针接口卡等组成。电子罗盘的研究制造与运用也达到了一个前所未有的水平。目前电子罗盘按照有无倾角补偿可以分为平面电子罗盘和三维电子罗盘,也可以按照传感器的不同分为磁阻效应传感器、霍尔效应传感器和磁通门传感器三类。......
2023-06-26

半闭环控制,减速器和丝杠间隙造成的误差在位置反馈环外,这些误差不能被抑制,因此控制准确度较全闭环控制低,但是成本低,安装和维护都比较方便。......
2023-06-19

自动弱磁控制直流调速系统是基速以下采用调压调速,基速以上自动进行弱磁升速的调速系统,系统的组成如图2.29所示。图2.29 自动弱磁控制直流调速系统的组成系统弱磁控制过程如下:调节转速给定Un信号,转速上升,在转速没有达到额定转速时,因为电动势反馈信号Ue
2023-06-19
相关推荐