从数据分析看,重庆43个指标水平值区间在0~3.5,均值为1.039 7。从这些指标中可以看出,重庆的交通客运规模、旅游设施和接待规模、文化设施规模等指标相对较好,说明重庆比较注重城市的旅游文化基础设施建设,有助于提升适合本地居民日常休闲与外来游客观光度假的城市吸引力。从中可以发现,低于均值水平的指标主要是人均意义上的指标和环境质量等方面,说明重庆的人均休闲消费水平还比较低,环境质量有待提高。......
2023-07-17

图5.22 法国物理学家Léon Fou-cault于1852年发明的陀螺仪,复制品现收藏于法国国家工艺美术博物馆(图片来源:维基百科)
惯性测量单元IMU,有时也被称为惯性导航单元INU中主要使用的测量元件是三轴陀螺仪与三轴加速度计。陀螺仪是飞行器进入自动驾驶的第一个环节,正是老斯佩里在1909设计实现了第一台在飞行器上使用的陀螺仪设备,让无人机姿态反馈变为现实。
陀螺仪的作用是反馈无人机的角速率状态信息[p,q,r]T。随着技术的进步,陀螺仪的制作工艺有了很大的变化,但原理却是一样的。以标准的机械式陀螺仪为例,本身是一个高速旋转的转盘与安装轴相连,旋转中保持转动方向向量不变。一旦发生改变会在安装轴上产生动量。正是通过检测从转盘到安装轴的转动方式来计算转动向量的变化率,也就是角速率了。(请思考问题:陀螺仪的输入输出数据分别是什么?)
加速度计的作用是反馈回无人机三个轴上的加速度信息。原理即通过本身检测到的重力结合在运动过程中不同轴线上的相对压力变化推算出无人机系统在轴线上的加速度。(请思考问题:这样获取加速度数据会造成怎样的误差?)
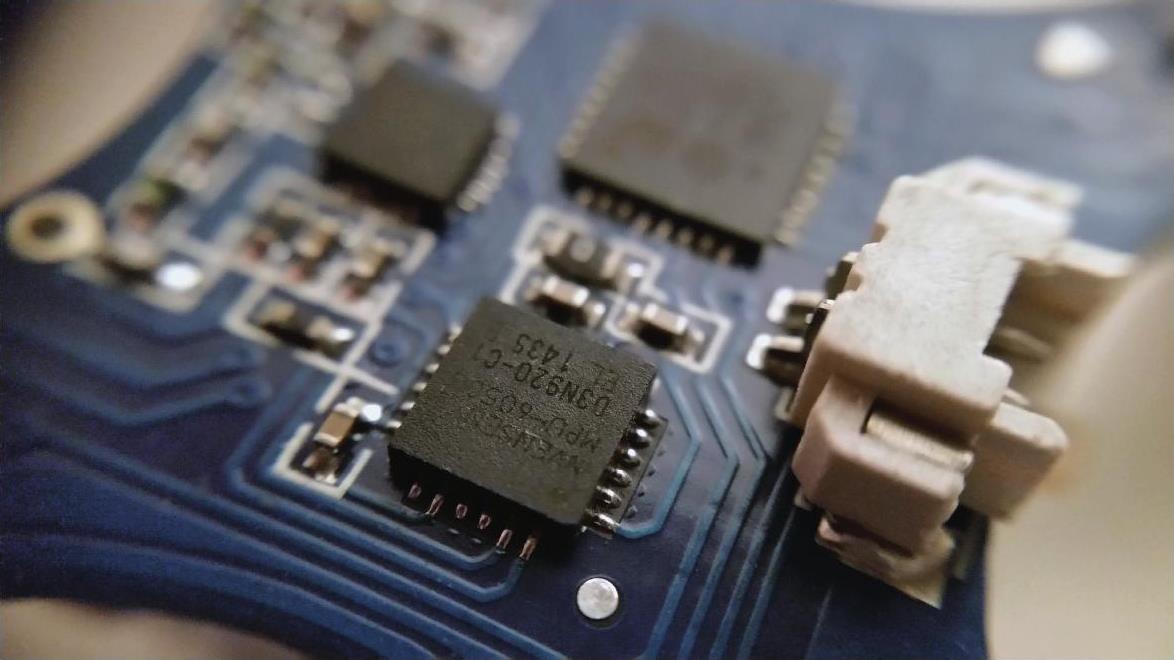
图5.23 CD-CX10RFW飞控上的MPU6050芯片,该芯片包含一个三轴陀螺仪,一个三轴加速度计以及一个片上DMP(Digital Mo-tion Processor)进行数据融合(图片来源:维基百科用户Andres Rueda)
然而IMU系统反馈的状态信息往往是存在误差的,这就会使控制器模块的计算效果大打折扣。这种误差一般来自于两个方面:算法误差、物理误差。获得无人机姿态信息最直接的算法是角速度积分,而在实际产品中由于积分会导致误差积累,这样直接的暴力计算方式很少被直接使用。更多情况下无人机工程师会采用多传感器进行数据融合,并结合滤波、补偿等相关算法对数据进行处理,保证数据质量在控制器计算能够接受的范围内。
而物理误差则在我们拿到芯片之前可能已经存在,比如加速度计是通过不同方向上的合力来获取状态,如果产生了原始偏差,会导致无人机在水平停放时也提示处于运动状态,这实在是一件很容易使无人机控制器“抓狂”的事情。

图5.24 检测无人机是否平放时常用的水平仪
因此在安装时要保证惯性测量元件水平放置,以避免初始误差。可以通过水平仪来检测,也可以通过手机下载水平仪APP或者干脆用手机的惯性测量元件校正无人机的对应元件。在无人机起飞之前,飞手需要对系统中的传感器进行校准,以最大限度地避免传感器初始误差,如果不在起飞前排除这些干扰因素,将会给我们的后续分析与操作带来很大风险,起飞前几分钟的硬件校准所带来的效果可能比你在电脑前查一天代码还要大得多。
随着MEMS技术的发展,陀螺仪和加速度计在成本、重量、体积、精度方面相比于二十年前已经获得了巨大飞跃。现在工程师可以使用一片价格低廉,封装着陀螺仪与加速度计的小芯片帮助电子产品反馈回所需要的状态信息,这在二十年前是难以想象的。事实上无人机并不是运动感知芯片的第一个受益者,我们在智能手机、视频游戏机,掌上电脑等电子产品中早已体验过它们的性能。对于智能硬件产品而言,信息反馈都是至关重要的环节,而内环姿态无疑是信息反馈中的核心步骤,因此当读者能够在姿态快速变化的无人机系统中熟练实现姿态信息反馈时,恭喜你,这样的技能已经可以满足很多智能硬件的工作要求了。
有关城堡里学无人机:原理、系统与实现的文章

从数据分析看,重庆43个指标水平值区间在0~3.5,均值为1.039 7。从这些指标中可以看出,重庆的交通客运规模、旅游设施和接待规模、文化设施规模等指标相对较好,说明重庆比较注重城市的旅游文化基础设施建设,有助于提升适合本地居民日常休闲与外来游客观光度假的城市吸引力。从中可以发现,低于均值水平的指标主要是人均意义上的指标和环境质量等方面,说明重庆的人均休闲消费水平还比较低,环境质量有待提高。......
2023-07-17

关于农村发展文化产业的可行性问题,可以从以下几个方面加以分析。这三种观点其实都表明,地方性的复兴已经构成世界性的一种趋势,地方性文化的兴起正是在文化全球化发展之中产生的一种文化现象,包括农村文化产业在内的地方文化产业的兴起显然是这一趋势的重要构成部分。这为农村发展文化产业奠定了人性基础。国内外许多成功的个案经验证明了农村发展文化产业不......
2023-07-18

太阳99%的能量就是由中心核反应区的热核反应产生的。图2-1太阳的构造太阳的内部主要可以分为三层:核心区、辐射区和对流区。到达陆地表面的太阳辐射能大约17×104亿kW,只占到达地球范围内太阳辐射能的1/10。即使如此,17×104亿kW的能量相当于全球一年内消耗总能量的3.5万倍,由此可见太阳能利用的巨大潜力。......
2023-07-02

捷联式惯性导航系统没有物理伺服平台。 初始对准是指惯性系统进入导航工作状态之前, 确定每个加速度计输入轴的方向或者捷联矩阵的初始值。 当前状态计算是指惯性系统进入导航工作状态, 根据加速度计和陀螺仪输出, 按照力学方程组, 实时解算并提供载体的速度、位置和姿态角等导航参数信息。随着航海、航空、航天技术的不断发展, 人们对惯性导航系统工作精度要求越来越高。......
2023-06-15
如图7-12所示,任意平面图形上所有微面积dA与其坐标z、y乘积的总和,称为该平面图形对z、y两轴的惯性积,用Izy表示,即图7-12平面图形对z、y轴的惯性积惯性积可为正,可为负,也可为零。可以证明,在两正交坐标轴中,只要z、y轴之一为平面图形的对称轴,则平面图形对z、y轴的惯性积就一定等于零。图7-13简单图形的惯性矩及惯性半径②简单图形的惯性半径。......
2023-06-16

完成mesh的生成后,宏单元和标准单元连线方式与传统流程一致。采用-partial的方式可以将低层金属straps下方的区域设定为标准单元端口的禁区,采用-complete则会将STRAPS下方的区域设置为整个标准单元的禁区。由于时钟树综合还未进行,因此时钟网络依然当作零延时的ideal net进行计算,因此不存在需要进行hold违例检查的情况。......
2023-06-26

在摩擦焊加热过程中,飞轮受摩擦扭矩的制动作用,转速逐渐降低,当转速为零时,焊接过程结束。图2-4-38 惯性摩擦焊原理示意图2.惯性摩擦焊焊接参数对于惯性摩擦焊,在焊接参数选择上与连续驱动摩擦焊有所不同,主要的参数有起始转速、转动惯量和轴向压力。......
2023-06-26
由于国内抗高过载惯性器件近两年才出现, 截至目前在智能榴弹二维弹道修正引信上尚无成熟的工程实现方案, 因而, 主要采用卫星导航作为其弹道测量手段。接收机通道数又称信道数, 是指接收机能够同时接收可视卫星的数量。针对该问题, 当前卫星定位接收机的抗干扰技术主要在于抗窄带脉冲干扰和转发式干扰。......
2023-06-15
相关推荐