对于爱好者而言最需要注意是在放飞无人机前对环境进行详细排险与规划,分析飞行环境中可能会给GNSS系统带来影响的因素,并进行有针对性的方案制定。在安装无人机时尤其注意安装操作、布局、整体设计中GNSS信号的强弱。......
2023-07-05
对于无人机而言,飞行控制系统是当之无愧的核心,然而它并非一成不变,正如无人机系统在历史长河中的不断演化,飞行控制系统也经历了漫长的演变过程。但本节后面的内容将专门介绍飞行控制系统在我国无人机发展过程中的变化。

图5.7 “舒克和贝塔”第四集中航模大赛的场景
21世纪之前国内很少听到“无人机”这个词,更多的是遥控飞机或者航模。“80后”的朋友们应该还记得“舒克和贝塔”这部动画片,第四集中两只小老鼠帮助皮皮鲁赢得了航模比赛。那时的航模还没有“控”,因此除了舒克操控的直升机航模外,其他小朋友都使用了相对容易操控的固定翼航模。
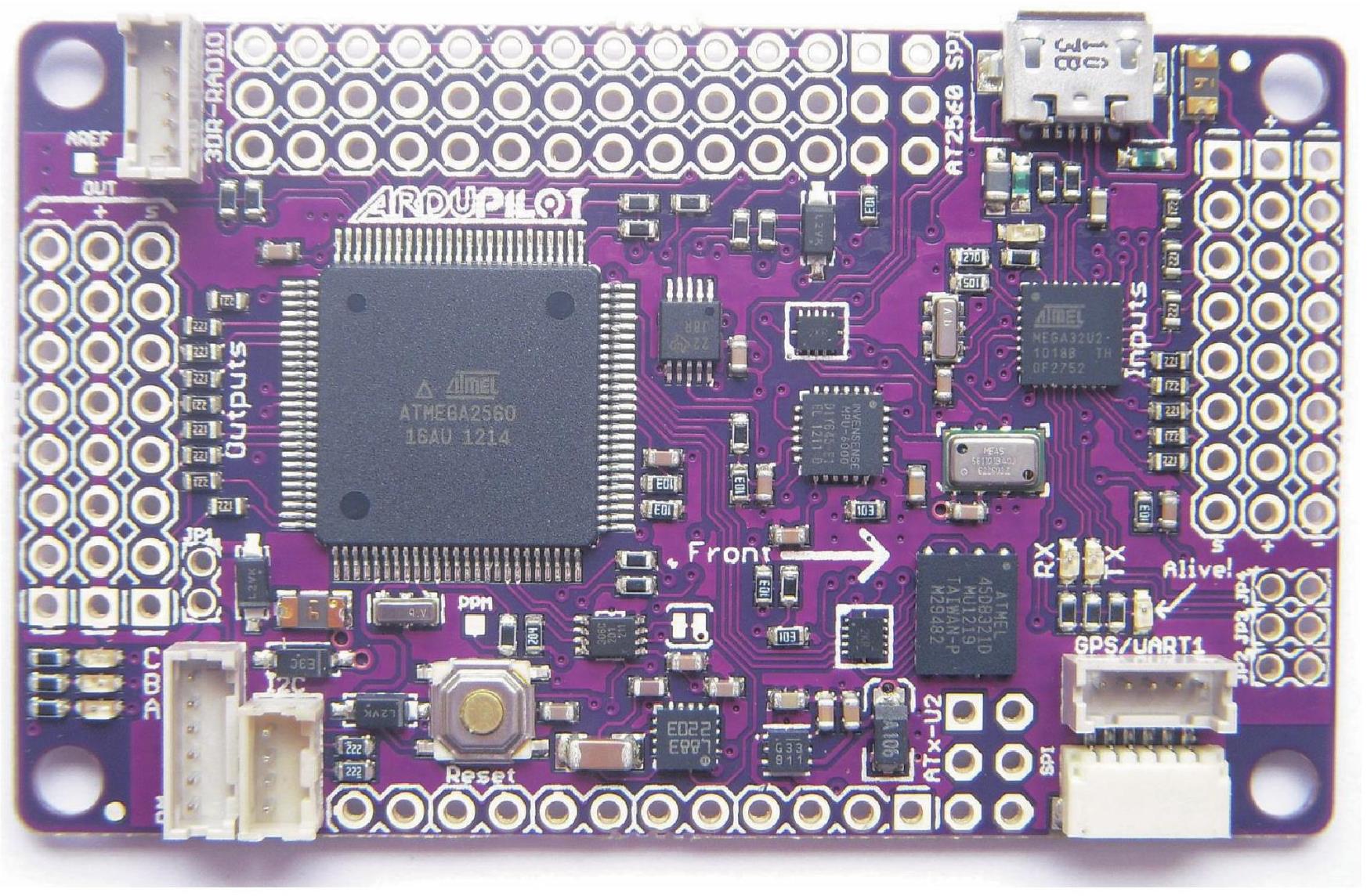
图5.8 ArduPilot Mega 2.5开源飞控(图片来源:维基百科用户Explore Labs)
2000年以后随着MEMS技术的发展以及国内航模发烧友的增加,从航模向无人机的转变趋势日趋明显,很多FCU(Flight Control Unit)开始出现在人们面前:国内的KK、QQ、玉兔等逐渐进入了爱好者自己组装的航模中。伴随着国际贸易的发展,国内爱好者有了更多机会接触到国外FCU产品,如法国的MWC,德国的MikroKopter、Auto Quad,美国的APM系列,穿越机常见的CC3d、Naze32、F3等。我们可以将其理解为现代意义上的“飞控板”。这些FCU通过相应的控制算法,对无人机系统反馈的状态信息进行解算,根据解算出的状态数据结合算法(一般为线性控制算法如PID、LQR等)计算控制量并输出。这个阶段中的FCU除控制器芯片外,往往只涉及很小一部分反馈模块中的传感器,同时内部算法一般只针对无人机本身的飞行控制。
2012年之后,随着航拍等市场需求的挖掘,无人机对自动控制的需求越来越强烈,在系统组成上体现为从FCU转向FCS的变化趋势。无人机厂家开始生产各自的飞控产品,该类产品更多是应用在该企业无人机产品所面对的市场领域。这类产品与FCU在系统范围或元素组成上有着明显的区别,一般不止包括之前飞控板所涵盖的硬件范畴,开始集成更多的传感器模块,如GPS、光流传感器、视觉定位系统等。
但这种转型并没有彻底完成,由于FCS的系统架构,系统设计,相关算法等各个方面都与无人机本身的应用行业息息相关,对于企业而言,真正的难点在于如何实现无人机技术与行业应用的衔接,即FCS的产品设计与技术发展不止于无人机,更重要的是延伸到无人机应用的行业中去。
无人机是基于任务的智能机器人系统,整体设计要根据专门的行业应用进行调整。这种调整势必面临来自稳定性、控制精度、行业适应性三个方面的挑战。
有关城堡里学无人机:原理、系统与实现的文章

对于爱好者而言最需要注意是在放飞无人机前对环境进行详细排险与规划,分析飞行环境中可能会给GNSS系统带来影响的因素,并进行有针对性的方案制定。在安装无人机时尤其注意安装操作、布局、整体设计中GNSS信号的强弱。......
2023-07-05

祝新华和章熊的研究结果比较接近,有三个主要观察点:内容、语言、结构;高考作文评分标准则简化为“内容”和“表达”两个观察点,将“结构”融入了“表达”维度。祝新华等人的评分标准中,三个要素有着明显的主次关系,“语言表达”第一(50%),“思想内容”第二(40%),“层次结构”第三(10%)。综上,我国作文评分标准存在着诸多需要进一步探讨的问题。......
2023-08-17

虽然是首次亮相春晚,多旋翼无人机机群表演却并不是什么新鲜事。视觉方案核心就是视觉测距,编队问题需要动态地以一定频率刷新一个视野内的位置点云,测量无人机相对位置,去除视野内其他东西的干扰。无人机编队军事应用无人机集群表演进展得如火如荼,而实际上,无人机集群最大的潜力在军事领域。......
2023-07-23

无人机可以归入智能空中机器人系统,设计要根据任务需求进行。但是,没有摄像头,没有激光扫描设备,换句话说,无人机采集的全部数据只能用于无人机自身飞行控制,不会有任何数据传回。图3.14 无人机技术发展的三个阶段。同时采集回来的数据可以被传回使用,也可以提供给无人机平台进行飞行控制。......
2023-07-05

我国农村电商服务发展的大背景得益于我国互联网的迅速发展同时得益于国家出台的政策性文件以及颁布的相关法律。在2004年时全国人大及其常委会通过了《电子签名法》,这意味着国家对于纸质合同的突破,意味着在互联网环境下,对于电子商务中合同签名进行进一步的法律规制。2015年,国务院出台了《关于大力发展电子商务加快培育经济新动力的意见》《关于积极推进“互联网+”行动的指导意见》以及全国人大通过的《国家安全法》等。......
2023-08-07

《民用无人驾驶航空器系统空中交通管理办法》这样解释:民用无人驾驶航空器飞行应当为其单独划设隔离空域,明确水平范围、垂直范围和使用时段。也就是说,无人机有自己的一片天,不能其他有人驾驶航空器共享,想要合法,就只能在隔离空域内飞行。划设临时飞行空域的申请,应当在拟使用临时飞行空域7个工作日前向有关飞行管制部门提出。......
2023-07-23

图2.46 复合按钮与接触器常闭按钮的互锁电路在电路中,“互锁”主要涉及两种不同模式的电路,即“正—停—反”带有中续性电路及“正—反”不带有中续性电路。图2.47 电动机“正—停—反”可逆控制线路电动机“正—反”可逆控制线路如图2.48所示,这个电路利用两个复合按钮来实现,本质上就是:互锁电路就是控制电路的两个回路,互相锁定,一个动作、另一个不能动作。......
2023-09-18
作为推动公立医院改革的核心工作之一,“医联体”的形成可以进一步推动分级诊疗体系的逐步建立和完善,真正做到合理的医疗卫生资源配置,正确引导病人合理就诊流向。在他看来,医联体建设应该实行倒推,即有服务购买方的医保方面提出要求,在支付方式上下功夫,构建合理的约束支付机制来引导病人的流向,例如通过报销比例,大力鼓励区域内患者去社区就诊[17]。......
2023-07-26
相关推荐