直升机姿态控制力矩来自于主旋翼和尾桨。抛开各姿态中的耦合因素,主旋翼提供俯仰和横滚所需的姿态控制力矩,尾桨提供偏航力矩。挥舞产生横纵挥舞角,主旋翼拉力就是通过横纵挥舞角投影在其他方向上,并通过桨毂产生力矩实现直升机姿态控制。图4.16 伺服电动机与自动倾斜器连接直升机型无人机一般通过四个伺服电动机实现姿态控制,一个伺服电动机来控制油门开量。......
2023-07-05
一般说到无人机的控制方式只涉及姿态控制方式,但对于一部分机型如直升机型、多旋翼类型等,除了姿态控制外也涉及反扭矩的提供方式。提供反扭矩的方式在上述两种机型中都非常明显了:直升机通过控制尾桨总距提供机体坐标系偏航方向上的反扭矩,多旋翼无人机则通过相同数目不同转向的定距桨实现扭矩平衡。
对于定义范畴非常宽泛而机身结构相对封闭的涵道无人机而言,姿态控制方式和扭矩平衡的实现形式是相当灵活的。
涵道无人机的姿态控制方式可以分为两大类:耦合姿态控制和解耦姿态控制。
1)耦合姿态控制结构
涵道无人机的常见控制结构:单旋翼结构和共轴双旋翼结构。
其中单旋翼结构常见的机型如i-STAR,以及“球型”无人机Fleye。
耦合类涵道无人机一般采用环形结构设计,以i-STAR为例,上部中间体中安装动力系统(活塞式发动机、发动机控制器、螺旋桨、有效载荷等)。其中螺旋桨为常见的定距桨,没有变距,没有挥舞,直接由发动机驱动。下部中间体内包含8块固定翼板稳定于涵道中央,内部搭载反馈传感器系统。这8个固定翼板(固定片)安置角不变,可以平衡单旋翼扭矩。控制翼板(导流片)由伺服电动机控制角度变化,从而产生姿态控制力矩。
共轴双旋翼结构如图4.37所示,Cypher-2型涵道无人机就属于这一类设计结构。共轴双旋翼无人机提供反扭矩的方式显而易见:共轴旋翼等速对转。
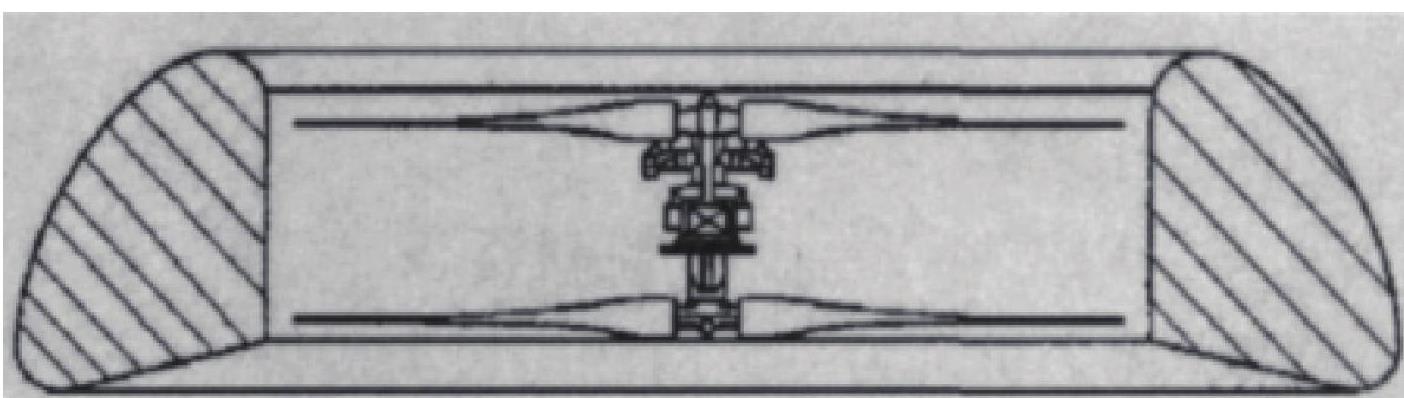
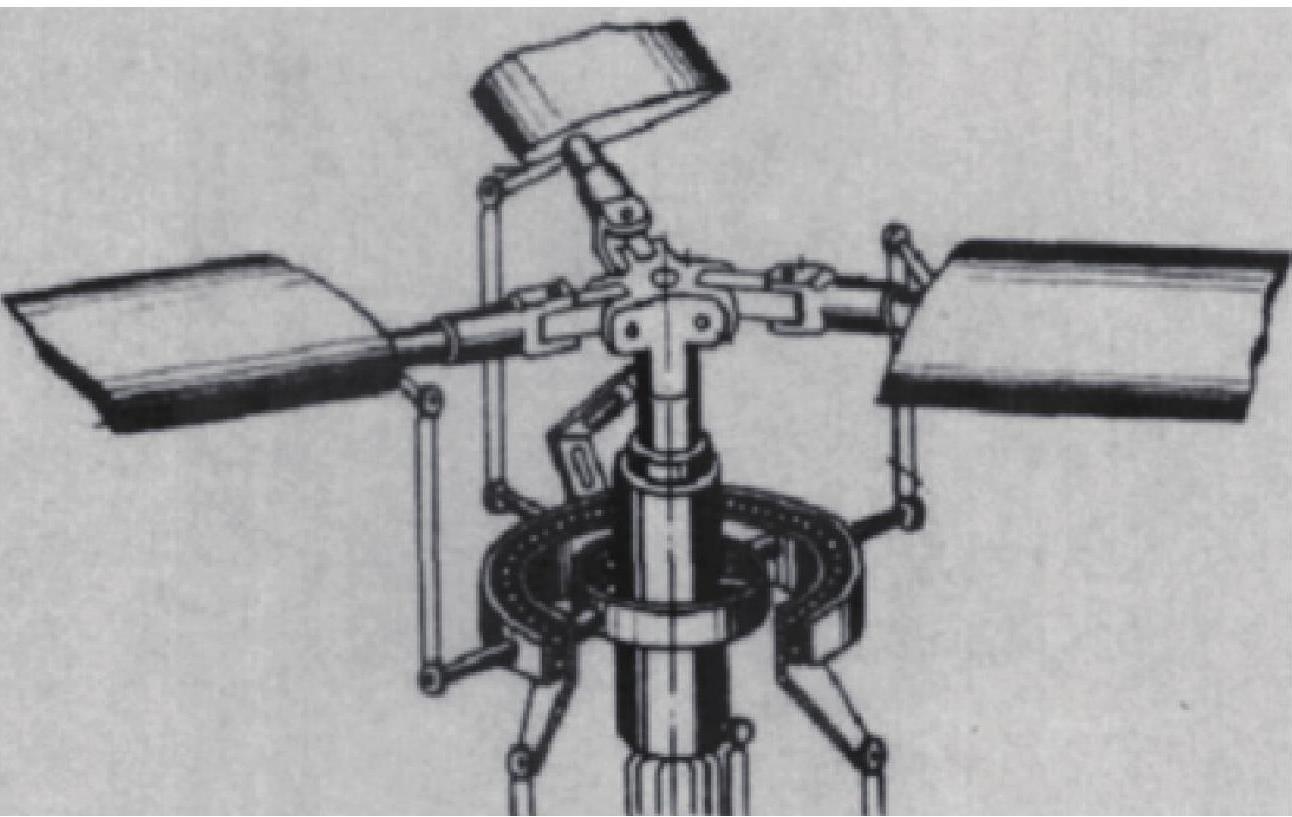
图4.38 旋转倾斜器结构示意图(图片来源见参考文献[2])
该类涵道结构采用旋转倾斜器,通过变距拉杆改变旋翼周期变距从而控制飞行器姿态,类似于直升机的主旋翼结构。
2)解耦姿态控制

图4.39 Dragon Stalker无人机,前飞与垂飞通道解耦(图片来源:维基百科用户Firewall)
解耦姿态控制方式非常直接:主涵道提供偏航力矩,调节涵道提供横滚力矩,尾桨涵道提供前飞推力,水平涵道共同提供垂向升力。因此解耦控制可以看作将无人机六个自由度运动分解到单独的涵道中实现,避免相互影响。
有关城堡里学无人机:原理、系统与实现的文章

直升机姿态控制力矩来自于主旋翼和尾桨。抛开各姿态中的耦合因素,主旋翼提供俯仰和横滚所需的姿态控制力矩,尾桨提供偏航力矩。挥舞产生横纵挥舞角,主旋翼拉力就是通过横纵挥舞角投影在其他方向上,并通过桨毂产生力矩实现直升机姿态控制。图4.16 伺服电动机与自动倾斜器连接直升机型无人机一般通过四个伺服电动机实现姿态控制,一个伺服电动机来控制油门开量。......
2023-07-05

音频节目信号在送到发射机音频输入端口前,一般都要经过一个接收、处理、传输的过程,滤波和平衡/不平衡转换电路的作用就是滤除音频节目信号在从节目源传输到发射机的过程中感应的高频干扰信号和产生的杂波信号,并将平衡输入的音频信号转换为不平衡输出的音频信号。N2A、N2B、N2C及周围电阻R10~R13、电位器RP2构成平衡/不平衡转换电路,其中N2A、N2B是电压跟随器,N2C及周围元件构成差分放大器。......
2023-06-26

6-1 扭转切应力与扭矩方向是否一致?判定如图6-23 所示的切应力分布图哪些是正确的,哪些是错误的。图6-23题6-1图6-2 如图6-24 所示,试求各杆在1-1、2-2 截面上的扭矩,并作出各杆的扭矩图。图6-26图6-4图6-5 已知圆轴受外力偶矩m=2 kN·m 作用,材料的许用切应力[τ]=60 MPa。图6-28题6-8图图6-29题6-9图......
2023-06-19

生理、心理和意志的平衡金克拉再度重申,他在前面的章节中所说过的话,他认为推销员是整个销售过程中最重要的环节。基于这样一种认识,所以推销员的角色与其所建立的生理、心灵和意志的内在平衡息息相关。无论如何一个有生理、心理、意志力的推销员是不会说这样的话的。根据美国心理学先驱詹姆斯博士的说法。金克拉所认识的最有时间概念、奉献牺牲,最有创意的业务员之一是霍尔·克罗斯。......
2024-07-22

读者需要一些额外信息才能够精确描述无人机的飞行状态,这正是本节将介绍的内容:无人机姿态。)多旋翼无人机的姿态可以通过机体坐标系和NED坐标系之间的关系来定义。在机型介绍中,大家已经了解了多旋翼无人机在实际操作中的姿态控制方式。......
2023-07-05
2)砂轮在法兰盘上安装产生不平衡量。根据砂轮大小的不同,可配以不同的平衡块。砂轮平衡后需将平衡块上的螺钉拧紧,以防发生移动。图6-13 调整平衡架纵向位置3.砂轮的修整用砂轮修整工具将砂轮工作面已磨钝的表面修去,以恢复砂轮的切削性能和正确的几何形状的过程,称为砂轮的修整。一般情况下,砂轮直径为100mm以下时,可选0.25克拉的金刚石;砂轮直径为300~400mm时,选用0.5~1克拉的金刚石。......
2023-06-28
图11.13所示为连接到基板上的焊球及其基板的自由下落示意。若假设板垂直下降,其边缘处以速度v撞击地面,在撞击地面时,板和焊球的速度都将从v变为零,然后变为-v。短时间将产生大的剪切力和扭矩。因此在设计跌落测试时,Δt的定义与测量是最关键的环节。应力分布产生的总力矩应等于扭矩。如上所述,σmax取决于扭矩,而扭矩取决于力,力取决于Δt。我们可根据σmax的大小确定跌落能否导致裂纹在界面处形成。......
2023-06-20

为了防止立式液压缸缸体或活塞或垂直运动的工作部件由于自重下落或超速下落而设置的油路称为平衡回路。图6.27用顺序阀的平衡回路图6.28用平衡阀的平衡回路图6.28是用远控平衡阀实现的双向平衡回路。因液压缸活塞所带动的负载在运动过程中性质发生变化,为使变化的负载运动平稳,在液压缸两腔均设置一个远控平衡阀,构成双向平衡回路。图6.29用液控单向阀的平衡回路图6.30用液控单向阀的双向锁紧回路......
2023-06-18
相关推荐