图4.4 美国加利福尼亚州空军基地进行跑道测试的全球鹰对于大型固定翼无人机而言,完全可以采用常规飞机的起飞方式。弹射起飞方式有利于将更大型的无人机部署到更多地点,如山地、航母等。图4.6 渡鸦无人机抛飞与检查手抛起飞一直是小型固定翼飞机的重要起飞方式。)传统固定翼无人机的起飞方式就是以上几种。......
2023-07-05
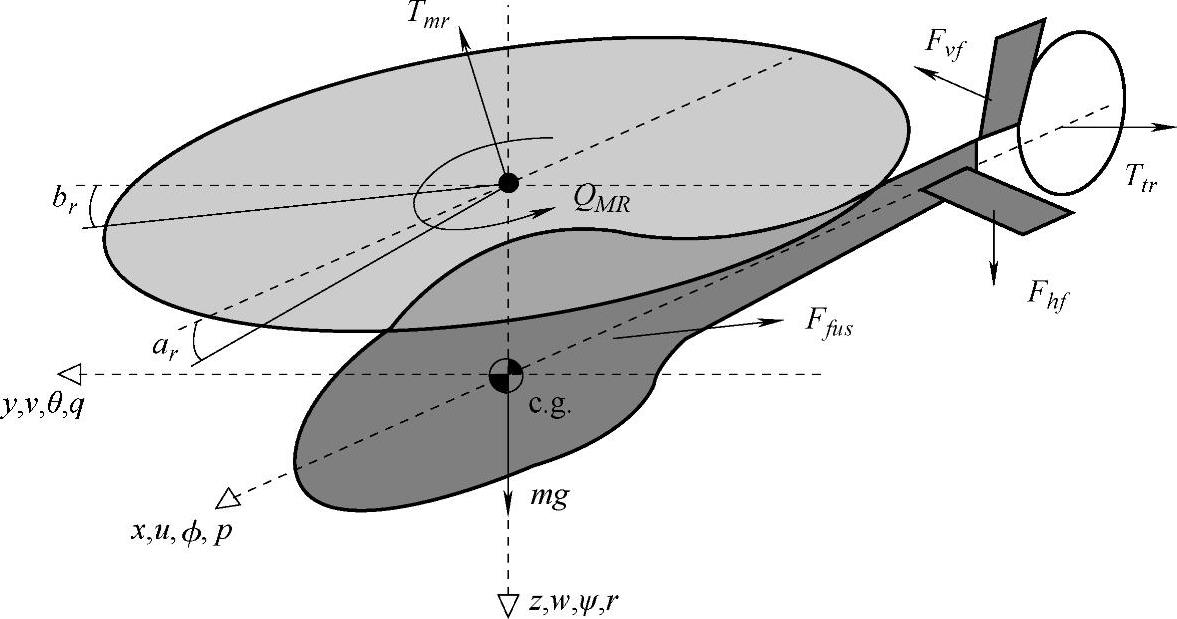
直升机型无人机的运动包括六个自由度:惯性坐标系下三个直线方向,旋转坐标系下三个姿态:俯仰、横滚、偏航(纵向,横向,垂向)。直升机姿态控制力矩来自于主旋翼和尾桨。抛开各姿态中的耦合因素,主旋翼提供俯仰和横滚所需的姿态控制力矩,尾桨提供偏航力矩。直升机型无人机如果将挥舞角也看作内部状态则会增加模型的阶数:位置状态[X,Y,Z],速度状态[u,v,w],姿态角状态[ϕ,θ,ψ],角速度状态[p,q,r],挥舞角状态[a,b]。

图4.14 直升机型无人机主旋翼拉力及尾桨推力示意图(图片来源:维基百科)
容易看出,无人机通过主旋翼旋转提供拉力,但是如何将拉力投影到纵向和横向并产生姿态控制力矩呢?对于直升机型无人机而言是通过主旋翼挥舞实现的。直升机主旋翼桨尖平面(Tip Path Plane:TPP)不是固定在一个二维平面中,而是上下挥舞,以此平衡前飞时直升机主旋翼受力左右不均的情况。挥舞产生横纵挥舞角,主旋翼拉力就是通过横纵挥舞角投影在其他方向上,并通过桨毂产生力矩实现直升机姿态控制。

图4.15 自动倾斜器。它的结构分为两部分,上面会与主旋翼共同旋转,下边随着伺服电动机的动作而倾斜
直升机型无人机的主旋翼挥舞是通过自动倾斜器改变周期变距实现控制的。图4.15为自动倾斜器(十字盘)以及Bell-Hiller结构。通过这样的结构将伺服电动机的转动化为倾斜器角度变化,再控制桨距角,最终将主旋翼的升力投影在运动方向上并以此驱动直升机实现六个自由度的运动。

图4.16 伺服电动机与自动倾斜器连接
直升机型无人机一般通过四个伺服电动机实现姿态控制,一个伺服电动机来控制油门开量。控制姿态的伺服电动机中:Aileron、Elevator、Collective pitch三个伺服电动机和十字盘连接,控制直升机型无人机主旋翼的总距以及横向、纵向周期变距;Rudder控制尾桨,一般会连接偏航反馈控制器(Yaw rate feedback controller)对直升机型无人机进行“锁尾”。
小型直升机型无人机的转速一般是恒定的,这是通过恒速器来实现的。常用的如Futaba GY401、GY701等,它们本身也是陀螺仪,与接收机连接,通过屏幕设定即可实现主旋翼转速恒定。
有关城堡里学无人机:原理、系统与实现的文章

图4.4 美国加利福尼亚州空军基地进行跑道测试的全球鹰对于大型固定翼无人机而言,完全可以采用常规飞机的起飞方式。弹射起飞方式有利于将更大型的无人机部署到更多地点,如山地、航母等。图4.6 渡鸦无人机抛飞与检查手抛起飞一直是小型固定翼飞机的重要起飞方式。)传统固定翼无人机的起飞方式就是以上几种。......
2023-07-05

蜗杆传动用于传递两垂直交错轴的运动和动力。一般总是蜗杆为主动件,蜗轮为从动件。图1-65 蜗杆传动的类型a)圆柱蜗杆 b)环面蜗杆 c)锥蜗杆在圆柱蜗杆中,按螺旋面形状的不同又可分为阿基米德蜗杆、渐开线蜗杆和法向直廓蜗杆三类。由于蜗杆的齿是连续的螺旋齿,在与蜗轮的啮合过程中是连续不间断的,故传动平稳且无噪声。......
2023-06-25

一般说到无人机的控制方式只涉及姿态控制方式,但对于一部分机型如直升机型、多旋翼类型等,除了姿态控制外也涉及反扭矩的提供方式。对于定义范畴非常宽泛而机身结构相对封闭的涵道无人机而言,姿态控制方式和扭矩平衡的实现形式是相当灵活的。2)解耦姿态控制图4.39 Dragon Stalker无人机,前飞与垂飞通道解耦解耦姿态控制方式非常直接:主涵道提供偏航力矩,调节涵道提供横滚力矩,尾桨涵道提供前飞推力,水平涵道共同提供垂向升力。......
2023-07-05
淬火工艺中冷却是非常关键的工序,淬火工艺中所采用的冷却介质称为淬火介质。因此,从淬火冷却过程对淬火介质的要求来看,淬火介质应当具有在中温时冷却快、低温时冷却慢的特性,图7-5即为符合这种特性的理想的淬火介质的冷却曲线。中温区域也称为淬火临界温度区域,低温区域又称为淬火危险温度区域。热处理工作者对淬火介质进行了广泛深入的研究,获得了种类繁多的淬火介质以适应与不同材料、不同淬火工艺要求的需要。......
2023-06-24

城市品牌的可持续发展需要两个支撑点:一是要赋予城市品牌以灵魂,二是要赋予城市品牌建设以精神动力。城市的文化传统深深嵌入城市的肌理和民众的精神之中,成为一个城市的精神标识和灵魂。守护城市传统文化,就是守护城市的精神血脉。因此,在城市品牌建构中,守护传统文化并不意味着回到传统,而是要立足于满足当代人的发展需要,要根据有利于当代人的全面、健康发展的原则来进行文化选择。......
2023-07-18

1)Multi-Agent建模方法基于Agent的建模与仿真是一种“自下而上”的建模方法,通过模拟个体及其之间的行为来建模真实情景,描述从微观底层到宏观高层的涌现现象。基于ABMS方法所建立的仿真系统称为多Agent系统,主要研究一组自治Agent在分布式开放的动态环境下,通过交互、合作、竞争等智能行为完成复杂控制或求解,并通过多规格Agent组成的团体求解超出其个体能力的大规模复杂问题。......
2023-07-02
在教育改革与发展的过程中,教育理念的变革一直是一个颇受关注的领域,在很多的研究与实践中,教育理念的革新都是教育教学改革的重要前提和基础。从当前的研究看,学者们对于教育理念的概念认知并非完全一致,但是,对于教育理念的功能却有着较为一致的认识,教育理念的导向功能、育人功能、激励功能、反思功能和调控功能等,已经得到了普遍的认可。[3]近年来,随着教育科学研究的繁荣,基础教育领域的理念创新可谓日新月异。......
2023-07-19

相关推荐