现代意义的焊接技术出现在19世纪初的西方国家。1885年俄罗斯Benardos发明碳弧焊,1888年俄罗斯Slavianoff发明金属电极电弧焊,1890年法国出现了氧乙炔焊,从此焊接技术开始得到迅速发展,成为现代制造技术的重要组成部分。图1-1所示为焊接技术的重要发展历程。新材料及新结构的应用也促进了钎焊,胶接等先进连接技术的发展,甚至催生了熔钎焊、点焊胶接、激光胶焊等复合制造技术的应用。......
2023-07-02
虽然作为大众电子消费品的无人机出现时间很短,但关于它的故事可是有些年头了。
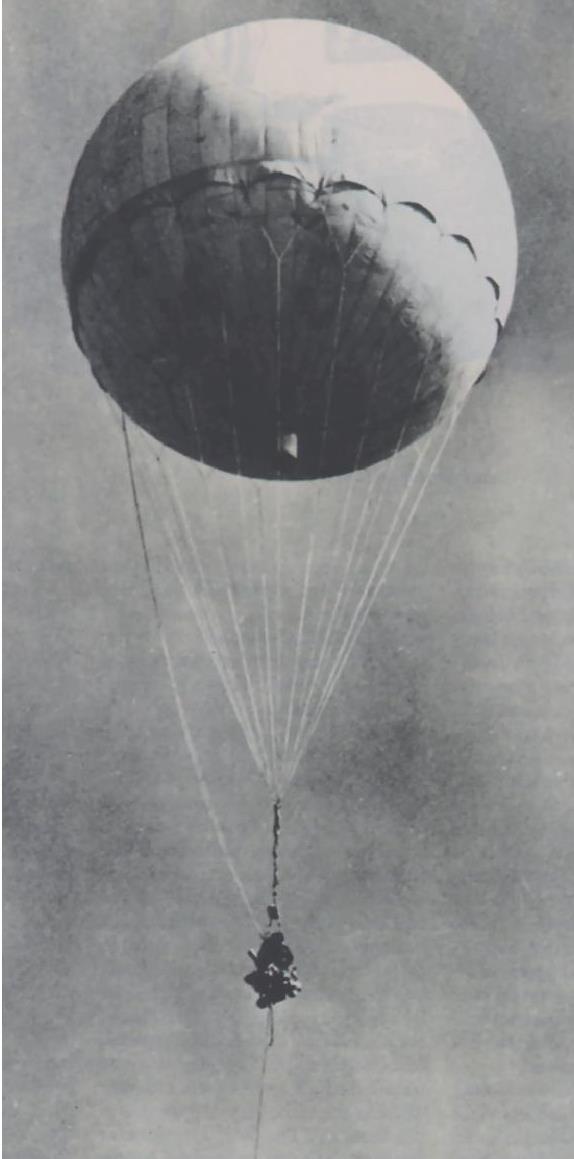
图3.3 二战时期日本战犯荒川秀俊设计的气球炸弹(图片来源:维基百科)
无人机很早就开始了自己的军旅生活,并在其中渡过了自己的大部分时光。1849年奥地利人用气球炸弹袭击过威尼斯,只是这种气球炸弹由于不能远程控制也无法实现真正意义上的“驾驶”,只能算作无人机的年轻小表弟,但空中无人设备(奇怪的名字)自此已经开始出现在实际应用中。
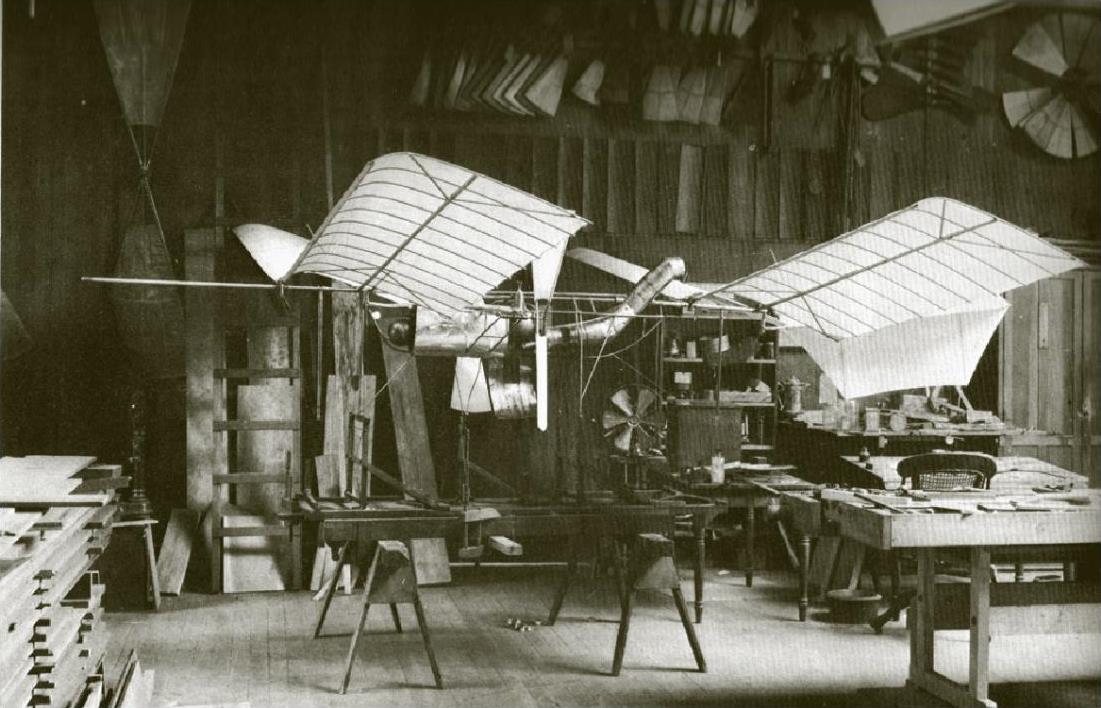
图3.4 作为第一架无人驾驶固定翼飞行器,Aerodrome几乎出现在所有论述无人机的资料中。该图为原飞行器1∶4比例模型,拍摄于1903年8月8日(图片来源:维基百科)
1896年5月6日塞缪尔·皮尔庞特·兰利(Samuel Pierpont Langley)在华盛顿附近的波托马克河上采用弹射系统进行了自己设计的“Aerodrome”(没错,是“drome”)飞机模型试飞。虽然它也无法进行“无人机飞行控制”,但相比于气球小表弟而言更加接近现代固定翼无人机的气动外形,而且它所采用的弹射系统也成为当今固定翼无人机的主要起飞方式之一。
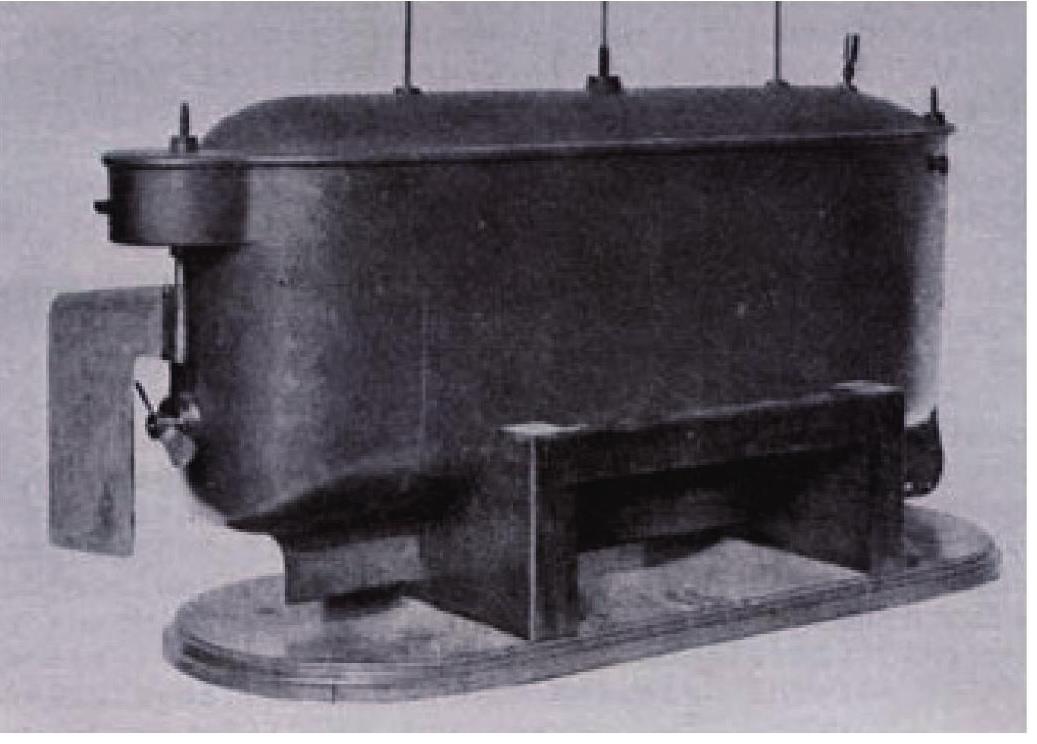
图3.5 特斯拉对时代的超越性在自动控制领域也有展现,上为Te-leautomaton(图片来源:维基百科)
1898年,“了不起的特斯拉”(Nikola Tesla)在一艘名为“Teleautomaton”的船上实现了无线电远程控制(Remote Control)。而当时人们以为特斯拉是通过猴子或者心灵感应来操控小船。虽然无线电远程控制被用在飞行器上还要等到1917年的“拉什顿·普罗科特”出现,但无论如何,远程控制至此终于从“心灵感应”与“猴子控制”变为了技术现实。
19世纪末期,人类已经掌握了无人机所需要的固定翼外形、起飞弹射系统、远程控制技术,只差空中自动驾驶系统了。这时,值得我们记住的一对美国父子出现了:老斯佩里(Elmer Ambrose Sperry)和小斯佩里(Lawrence Burst Sperry)。1909年,老斯佩里成功研发了飞行器陀螺仪,小斯佩里随后使用陀螺仪设计了第一台自动驾驶仪并于1914年实现飞行验证。父子斯佩里在无人机的发展中占有举足轻重的地位,因为正是他们第一次实现了真正意义上的无人机控制系统反馈环节。他们所献出的不仅是自己的辛劳,小斯佩里在1923年底,横渡英吉利海峡的飞行过程中遇难。(请思考问题:为什么自动驾驶需要这些设备?这些设备的原理与哪些物理知识相关?)
至此无人机所需要的所有技术组成部分都已完成(请读者特别从历史中注意无人机系统实现过程中的技术构成要素积累)。“万事俱备只欠战争”,“还好”人类好斗的本性不会让无人机等得太久。
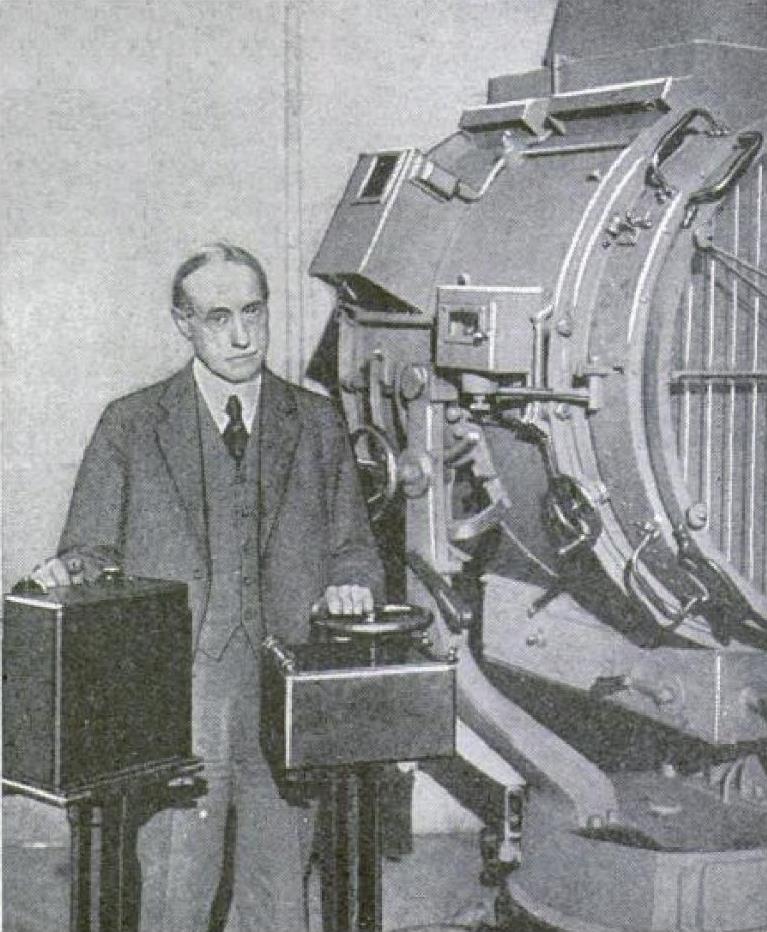
图3.6 老斯佩里(图片来源:Popular Science Magazine,jun.1920)
在第一次世界大战中,美国于1918年成功研发了“凯特琳虫”(Kettering Bug)双翼无人飞行器。大家可别以为它真是个“小虫”,它由前文提到的老斯佩里设计,翼展4米,可携带85千克左右的炸药,自动导航飞行距离达64~120千米。其系统结构设计中,通过陀螺仪和膜盒式气压表调整姿态与高度。可是这么远的距离,没有卫星系统如何实现远程定位和投弹操作呢?老斯佩里早为大家想好了,技术人员需要根据目标距离设置发动机转数,然后如果能够顺利飞过去,当达到发动机转数后就会坠落式投弹。听上去是不是很“脑洞大开”?确实,当时美军参谋认为这个小虫子给己方部队及盟友造成的威胁不亚于对敌军的威胁,因此只生产了45架且从未投入实战。(请思考问题:如果你是凯特琳虫的工程师,整个设计流程应该怎样实现?)


图3.8 新西兰皇家空军的虎蛾双翼飞机,将老旧飞机改装为靶机可以看做对产品价值的深度挖掘,其中的技术条件与思维条件都很重要(图片来源:新西兰国家图书馆)
1918年11月11日第一次世界大战结束,虽然由于自动驾驶技术还处于初级阶段,无人机并没有在一战中发挥直接作用,但它的价值已经引起了军方人员的注意。在第二次世界大战前,随着无线电射频发射技术的进步,采用无线电遥控操作的靶机被大量生产,一战与二战之间生产的靶机有12000多架,其中比较有名的如英国将老旧的“虎蛾(Tiger Moth)”双翼飞机改造为“女王蜂(Queen Bee)”靶机,着实省去了很多维护成本。

图3.9 战绩颇丰的FritzX炸弹与其击沉罗马号的瞬间(图片来源:维基百科)
在第二次世界大战中,无人机开始真正投入战场。在无人机的军事应用方面,纳粹德国有着相当建树,如1943年7月击沉罗马号战列舰的无线电遥控炸弹“弗里茨X(FritzX)”,还有大名鼎鼎的V1导弹,翼展6米,长约7.9米,能够携带850千克炸药以600千米/小时飞行200千米,以及后来性能更加“卓越”的V2导弹。

图3.10 携带空投鱼雷的洲际TDR-1攻击无人机,它的图像反馈系统体现了工程实现的灵活性(图片来源:美国海军)
盟军在无人机领域也有探索,比如著名的TDR-1攻击型无人机,该无人机由“洲际”飞机改装而成,需要一架护卫机跟随实现远程控制。护卫机中的控制人员通过TDR-1上所搭电视摄像机传回的图像进行操作。美国的“阿佛洛狄特计划”中,将B-17轰炸机改装为无人机,采用类似的控制方式对纳粹德国V1发射架进行打击。然而该无人机需要飞行员登上飞机,在飞行中完成炸弹设置工作后跳伞离开,这样的操作模式对于飞行员有着一定的危险性,肯尼迪家族长子约瑟夫·肯尼迪就在1944年执行任务时遇难。无人机此时实现了通过反馈更多类型的数据信息实现远程控制。(请思考问题:到现在为止,无人机可以通过设备反馈哪些类型的数据?这些数据有什么作用?)
第二次世界大战结束后,随着冷战的开启,及众多局部战争的需求,无人机在靶机,侦察机等领域继续发挥着重要作用。如冷战时期通过“战术无人机(无人侦察机)”带回前方照片,协助情报搜集或炮兵定位,比较有名的如美国特里达因·瑞安飞机公司生产的147BQM-34或称“萤火虫”无人侦察机,“火蜂”系列靶机;法国的CT-10、CT-20、R20小型战术无人机等等。
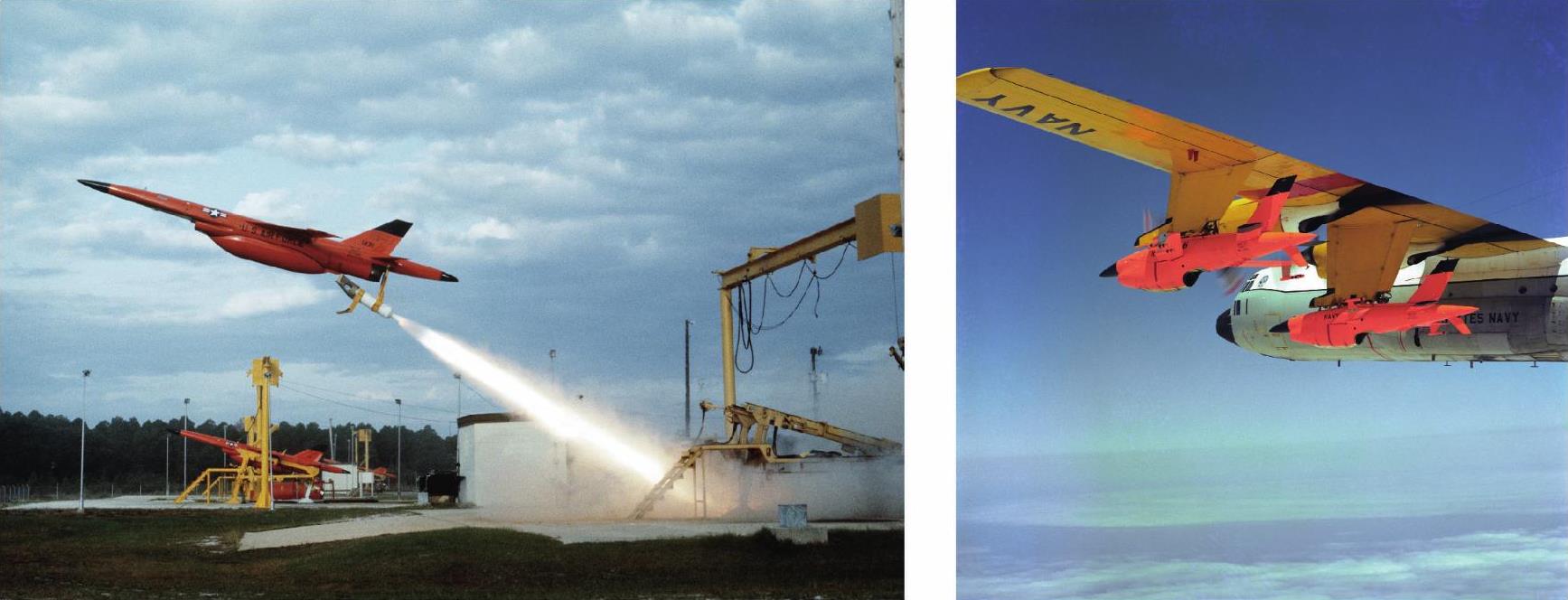
图3.11 两幅图中的无人机都是火蜂无人靶机,左边是BQM-34F型陆地起飞的图片,右边为挂载于洛克希德DC-130飞机的BQM-34S型,它们可以从机翼“发射”出去。这两幅图展示了无人机设计的灵活性(图片来源:美国海军)
这个是时期也不只是固定翼无人机一种,随着军队需求的推进,无人机机型也开始发生变化。如20世纪80年代,美国海军陆战队需要空中远程遥控装置(AROD)实现空中侦察和监视。桑迪亚国家实验室按要求开发出具备VTOL(垂直起降)能力的首款涵道飞行器,该项目受限于当时的飞行控制技术,于20世纪90年代终止,但这个项目最终演变为我们日后见到的涵道类无人机,比如霍尼韦尔公司的RQ-16。

图3.12 飞行中的全球鹰无人机(图片来源:NASA)
2001年“911事件”之后,美国进入反恐战争时期,此时无人机从战术侦察,诱饵迷惑等辅助任务向目标斩首等“侦打一体化”系统转变,比较有名的如安装美国通用原子公司MALE(Me-dium Altitude Long Endurance)无人机系统的“掠食者”无人机以及与其相对的HALE(High Alti-tude Long Term Endurance)无人机系统如诺斯罗普·格鲁曼公司的RQ-4“全球鹰”无人机。
在21世纪,随着MEMS(微机电系统)技术的发展,便携式无人机开始出现在人们的视野中,毫米级别的气压计、加速度计、控制芯片为无人机小型化提供了前提条件。与动辄几米长的大型无人机相比,这些小玩意更加容易隐蔽与携带。这类产品比较著名的如美国天空环境公司研发的RQ-11“渡鸦”小型固定翼无人机,翼展只有不到1.5米,飞行范围10千米以内,重量在2千克左右,并且无须弹射。

图3.13 军事行动中的RQ-11渡鸦无人机,从图中我们可以看到该无人机执行任务时需要携带的配件种类与数量(图片来源:美国空军)
电子器件成本的降低与硬件功能的提升,使得诸如Ardupilot这样的开源项目能够出现并在互联网上快速传播,这令无人机走进了更多人的生活。无人机的技术、算法不再停留于公司、实验室或少数科研人员手里,而是能够接触到众多的爱好者、工作者和创业者。在这些开放的软件、硬件资料中,无人机行业内外人士都可以上传、下载相关代码、硬件电路设计图等内容,参与的便捷性使无人机在自动驾驶技术上取得了快速发展,也形成了众多开源飞行控制方案,如MWC、APM、Ardupilot、Pixhawk等等。这种开放的精神让无数有需求的人受益,无人机很有可能是第一个实现真正意义上大规模开源的智能硬件行业。(请思考问题:为什么采用开源模式?你知道哪些国产开源飞控?)
有关城堡里学无人机:原理、系统与实现的文章

现代意义的焊接技术出现在19世纪初的西方国家。1885年俄罗斯Benardos发明碳弧焊,1888年俄罗斯Slavianoff发明金属电极电弧焊,1890年法国出现了氧乙炔焊,从此焊接技术开始得到迅速发展,成为现代制造技术的重要组成部分。图1-1所示为焊接技术的重要发展历程。新材料及新结构的应用也促进了钎焊,胶接等先进连接技术的发展,甚至催生了熔钎焊、点焊胶接、激光胶焊等复合制造技术的应用。......
2023-07-02

用于标准机械手的技术在过去30年中经历了显著的发展和差异化。图2.1清楚地显示了早期设计轻型抓手的困难程度。有限的控制技术能力也导致了明显的磨损迹象,机器人预计携带的有效载荷越多,设备的维护就越多。首先因为电动驱动器表现出与气动能源完全不同的行为;其次是因为它为抓取技术开辟了全新的可能性。这种类型的驱动器将极大地影响抓取技术的未来。......
2023-06-15

机床电器控制是随着科学技术的不断发展以及生产加工工艺不断改进而不断更新的。随着新的控制理论和电器及电子元器件的出现,还将不断地推动机床电器控制继续向前发展。到了20世纪40~50年代,交磁电机扩大机-电动机控制闭环反馈系统的出现,使机床电器控制系统的控制精度、快速响应性能都有了提高。......
2023-06-15

新中国成立以来,我国进行了3次有一定规模的海洋调查。第二次是始于1960年的“海洋标准断面调查”。1964年7月22日国家海洋局成立,我国从此有了主管全国海洋工作的行政机构。为维护国家海洋权益,我国先后组织了“南海中部调查”和“东海大陆架调查”。1976—1978年,国家海洋局先后5次派出远洋调查船,执行远程运载火箭试验远洋靶场任务。......
2023-11-29

RFID技术应用较早,20世纪60年代RFID技术的理论已经有了一些尝试性的实践。经过多年的发展,13.56 MHz以下的RFID技术已相对成熟,目前大家最关注的是位于中高频段的RFID技术,特别是860~960 MHz的远距离RFID技术发展最快。未来,它很可能和IPV6、移动通信网络、无线传感器网络、生物识别技术、GPS技术等融合起来,发挥更加显著的作用。......
2023-06-23

使用阻流棒可使干燥速率上升30%以上,控制横幅水分分布。与此同时,采用这种冲击干燥,对纸页的横幅提供了均匀、高效的干燥;OptiDry是属于全密闭的干燥方式以及纸页被支撑通过整个干燥部,具有可靠的无绳式引纸以及损纸易处理等特点,从而达到干燥部所要求的运行稳定性、最大化的蒸发率以及最佳的纸质等三方面的要求。使用分段干燥、空气循环和阶梯式布置可使穿透干燥的热效率高达80%。......
2023-06-23
滑模变结构控制起源于20世纪50年代,经历了70余年的发展,已经形成了一个相对独立的研究分支,成为自动控制系统的一种一般的设计方法。目前,滑模变结构控制在各个领域都得到了广泛的应用,发展也十分迅速。针对不同系统的特性,可产生不同类型的滑模变结构控制,如非匹配不确定性系统的滑模变结构控制、针对时滞系统的滑模变结构控制等。......
2023-06-24
在6.1,6.2,6.3节中我们建立了无人机运动过程中所需要的坐标系、转换矩阵、姿态表示方法。控制系统设计是无人机系统设计中的一部分,在实现过程中这部分的复杂程度有可能因实施方和具体任务而展现出很大的差异。因此本节将重点放在控制算法的程序实现上,无论是算法仿真,半实物仿真,还是直接进行产品实现,都离不开算法的程序实现。......
2023-07-05
相关推荐