若程序框图中同时存在优先级设为实时的VI和定时顺序,将导致无法预计的定时行为。名称是对定时循环的一个标志,一般被作为停止定时循环的输入参数,或者用来标识具有相同的启动时间的定时循环组。定时顺序结构由一个或多个任务子程序框图或帧组成,是根据外部或内部信号时间源定时后顺序执行的结构。定时顺序结构适于开发精确定时、执行反馈、定时特征等动态改变或有多层执行优先级的VI。图5-47 多帧定时循环图5-48 定时顺序结构......
2023-11-26
顺序型状态机是最简单的一种状态机结构,它和顺序结构等价,如图5-2所示。在状态机的基本架构上,将循环索引端连接到条件结构的选择端口上,并在随后一个条件子框图中控制循环结束。
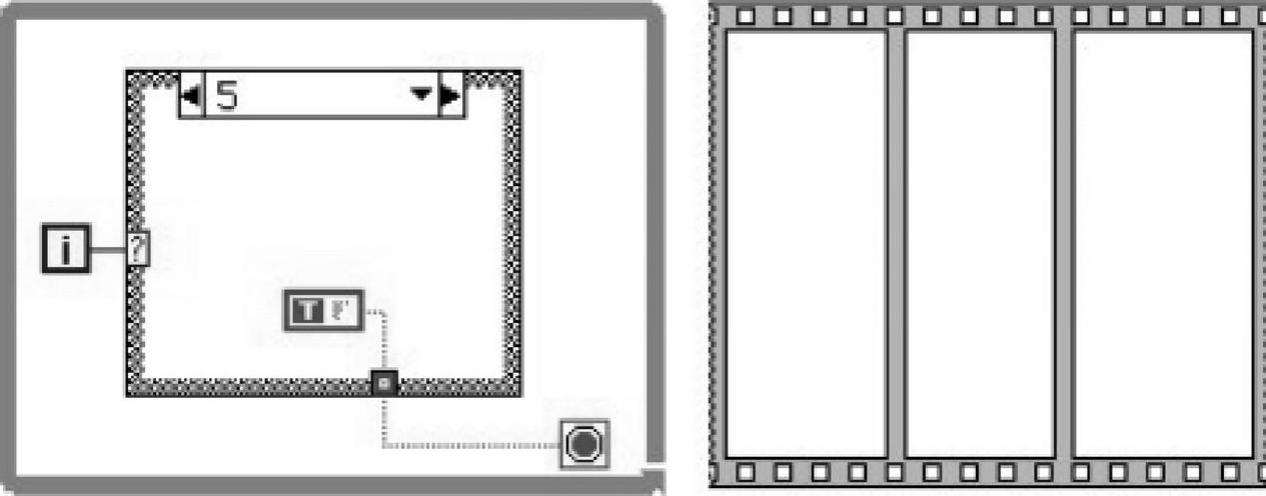
图5-2 顺序状态机结构与顺序结构
在状态之间的数据传递中,顺序状态机与顺序结构的实现方式是不同的。前者使用的是移位寄存器,后者使用的是顺序结构的数据通道或者顺序局部变量。
顺序型状态机模式的整个顺序状态序列的顺序是固定的,在程序运行时无法改变。也正是这一点制约了顺序型状态机的应用,因为它妨碍了作为LabVIEW优点之一的程序并行运行机制。为了能够在程序运行中改变状态序列的执行顺序,可以对其加以改进,采用移位寄存器代替循环索引控制状态机的执行。移位寄存器的高度灵活性使得程序员可以按照实际情况设定状态序列的实际执行顺序,只需要利用移位寄存器的输出值将各个状态之间串起来即可。
【例5-1】 利用顺序型状态机计时
利用顺序型状态机计算某个动作运行的时间,这个程序共需要3个子框图,调用“定时”函数子面板中的“时间计数器”函数开始计时。“时间计数器”函数返回计算机开机到当前的时间毫秒数。在图5-3b中,放入需要计算的动作模块,并将初始的时间值传递给移位寄存器。在图5-3c中将利用移位寄存器的值进行时间差的计算,得到动作模块运行所消耗的时间,并退出循环。
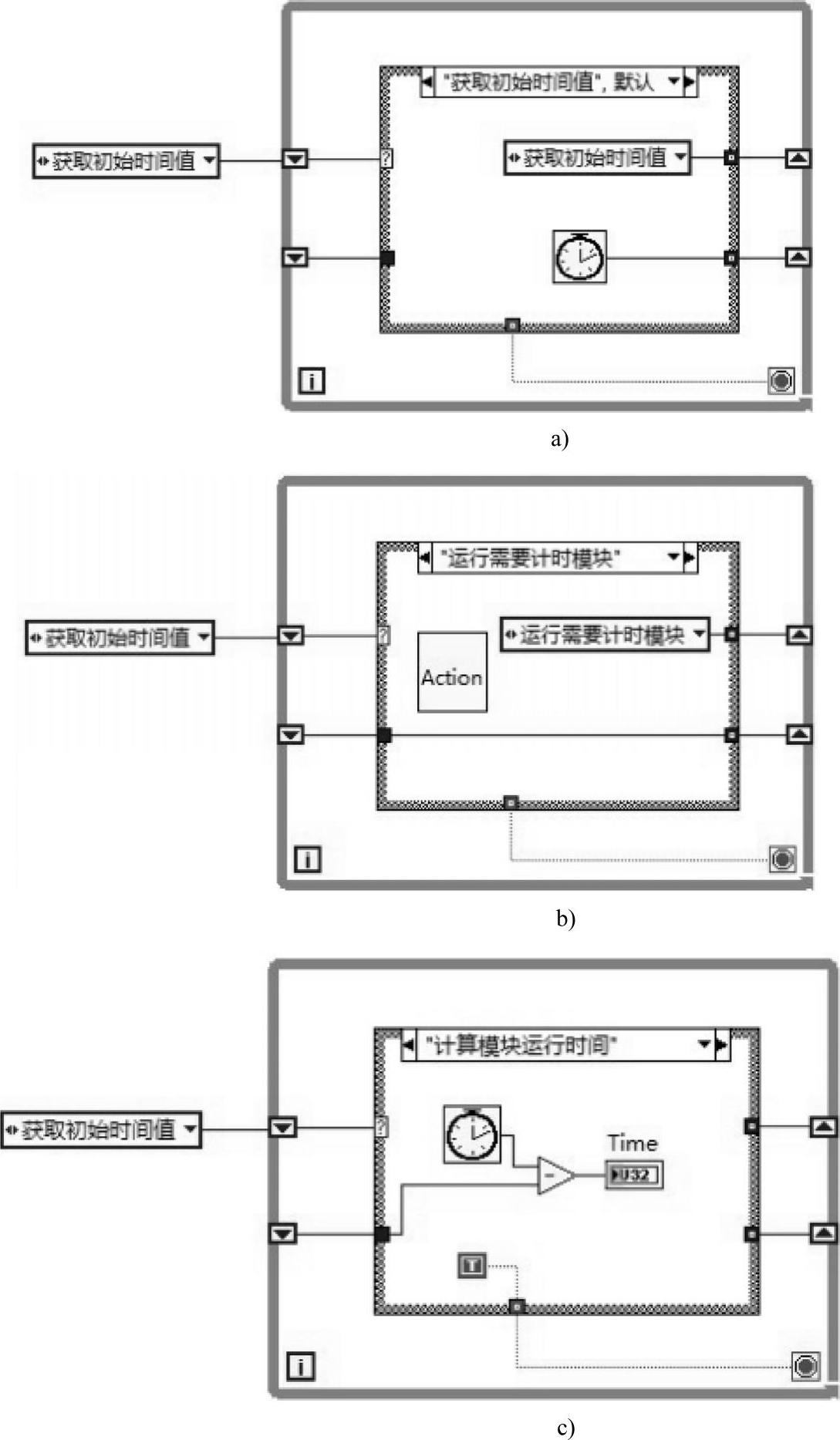
图5-3 程序框图
a)获取初始时间 b)需要计时的运行模块 c)计算模块运行时间
本例中使用枚举型常量控制状态机运行,这样就可以很清楚地知道各个条件子框图的具体含义。
有关虚拟仪器与数据采集的文章

若程序框图中同时存在优先级设为实时的VI和定时顺序,将导致无法预计的定时行为。名称是对定时循环的一个标志,一般被作为停止定时循环的输入参数,或者用来标识具有相同的启动时间的定时循环组。定时顺序结构由一个或多个任务子程序框图或帧组成,是根据外部或内部信号时间源定时后顺序执行的结构。定时顺序结构适于开发精确定时、执行反馈、定时特征等动态改变或有多层执行优先级的VI。图5-47 多帧定时循环图5-48 定时顺序结构......
2023-11-26

下面以顺序存储结构的线性表的插入和删除操作实现方法为例讨论顺序存储结构下操作的实现方法。 设线性表的最大数据元素个数为m,当前线性表中已有n(n≤m)个数据元素,要插入的数据元素保存在变量x中,线性表采用顺序存储结构存储。试设计顺序存储结构线性表的插入操作算法。......
2023-11-18

图1-43 正负对称输出电路多路输出自然包括对称型正负电压输出回路。另外,绕组的匝与匝之间也会产生匝间电容,这种电容的存在是产生峰值电流的原因之一。所有这些不同或不相等的结果将影响对称输出的不平衡,就有不对称输出的出现。虽然正负对称输出电路简单,但在成品开关电源中会出现一些问题,必须在调试过程中积累经验,认真试验,保证成品在大规模生产中不出现问题。......
2023-06-25

目的是改善材料的切削性能,消除毛坯制造时的残余应力,改善组织。由于毛坯在制造和机械加工过程中产生的内应力会引起工件变形,影响加工质量,因此要安排消除残余应力热处理。对高精度零件,如精密丝杠、精密主轴等,应安排多次消除残余应力热处理,甚至采用冰冷处理以稳定尺寸。......
2023-06-26

图5-29 平铺式顺序结构转换为层叠式顺序结构图5-30 改变各框架的顺序由于每个帧都是可见的,所以平铺式的顺序结构不能添加局部变量,不需要借助局部变量这种机制在帧之间传输数据。图5-33 层叠式顺序结构在层叠式顺序结构中需要用到局部变量,用以在不同帧之间实现数据的传递。图5-38 计算时间的程序框图在使用LabVIEW编写程序时,应充分利用LabVIEW固有的并行机制,避免使用太多顺序结构。顺序结构虽然可以保证执行顺序但同时也阻止了并行操作。......
2023-11-26

本节讨论集中式数据库系统里的查询优化问题,这很有意义。首先,分布式查询要翻译成本地查询,每个本地查询其实就是一个集中式查询。多关系查询无法进一步分离,无法再约简。单关系查询存放在特定的数据结构里,留待随后查询(如连接)的优化和OVQP使用。候选树则通过使用交换律和结合律对n元关系的连接序进行交换后获得。......
2023-10-28
图5-3 串联型稳压电路按输出电压高低可分为7805、7806、7808、7809、7812、7815、7818、7824V。图5-4 78系列集成稳压器典型应用电路图5-5 LM317典型应用电路输出电压:......
2023-11-24
梁底模和支架的卸载顺序,严格按照从梁体挠度最大处支架节点开始,逐步向两端卸落相邻节点,当达到一定卸落量时,支架方可脱落梁体。拆除支架时从跨中开始对称向两头均匀拆卸,以便使桥体重量对称、均匀地由两端支座平均承担,同时预防梁体因受力不均匀产生裂纹。拆支架时应缓慢,对称地卸落沙筒使梁体结构均匀受力,注意保留该段与尚未浇筑的下一段相邻跨的支架不拆,使梁体在施工阶段的受力更趋合理,有效防止混凝土的开裂。......
2023-06-23
相关推荐