电阻点焊在汽车制造中应用最广,通常一辆货车有3500~4500个焊点,轿车和箱式汽车有8000~12000个焊点。在车身装焊和汽车零部件生产中,广泛采用工业机器人,用于电阻点焊、激光焊、螺柱焊、涂胶等。据统计,2015年我国拥有各类工业机器人13万台,占全世界正在服役工业机器人总量的8%,估计我国目前焊接机器人的安装数约6万台,汽车制造是焊接机器人的最大用户。......
2023-07-02
近年来,我国自主开发了针对不同需求的特种焊接机器人,如球罐焊接机器人、管道焊接机器人、钢结构现场焊接机器人、马鞍焊割一体化机器人、海底管道铺设焊接机器人等。这类机器人系统有自主的决策能力,能够应付复杂的环境和条件变化、复杂空间曲线焊接部件,适合于造船、大型储罐或容器、建筑钢结构以及水电、核电等大型工程现场的焊接,促进了焊接机器人数字化与智能化技术开拓与发展。图12-27是采用无导轨全位置焊接机器人对管道的焊接。图12-28是马鞍形相贯线坡口切割和焊接一体化机器人的使用情况。图12-29分别是用于钢结构现场的方管和圆管焊接机器人。图12-30所示为核电汽轮机导流环自动堆焊机器人现场工作情况。
图12-31是海底铺管焊接机器人工作站控制系统框图及工作现场。针对海底油气输送管道(管径152~1219mm)对接环形焊缝的焊接工艺特点,开发了用于3000m深水铺管的具备窄间隙焊接能力的海底管道铺设焊接机器人,以及管道环缝窄坡口全自动焊接工艺。整个生产线由坡口制备、预热、消磁、根焊、填充焊、盖面焊、无损检验和修补、防腐涂覆以及管道输送等工段组成,焊接作业线每个工作站配备两套双炬管道焊接机器人系统,在管道左右两侧对称分布并各自完成半个圆周的下行5G焊接,即钢管对接水平固定全位置焊接。焊接机器人控制网络系统由主控单元、机器人本体驱动单元、焊接电源、手控盒系统以及电气辅助系统组成。主控单元系统包括基于Windows软控制的六个功能单元模块、人机组态平台以及数据库系统。主控单元控制器选择紧凑型工业平板电脑,系统可同时运行控制程序以及组态监控程序,主控单元集成了实时以太网,通信接口保证数据的实时交换,实现铺管生产线的动态协调及信息化管理。同时,海底管线铺设焊接机器人系统控制网络的多个功能子系统的多条现场总线通过高速以太网连接至各总线的耦合器模块,完成了各功能单元系统过程数据的实时交换。数据传输采用抗干扰能力较强的CAN总线通信,在高速实时以太网耦合单元下挂接CAN总线主站模块,焊接机器人运动控制单元各伺服驱动器、倾角传感器以及焊接电源作为CAN-open从站站点,通过过程数据通信
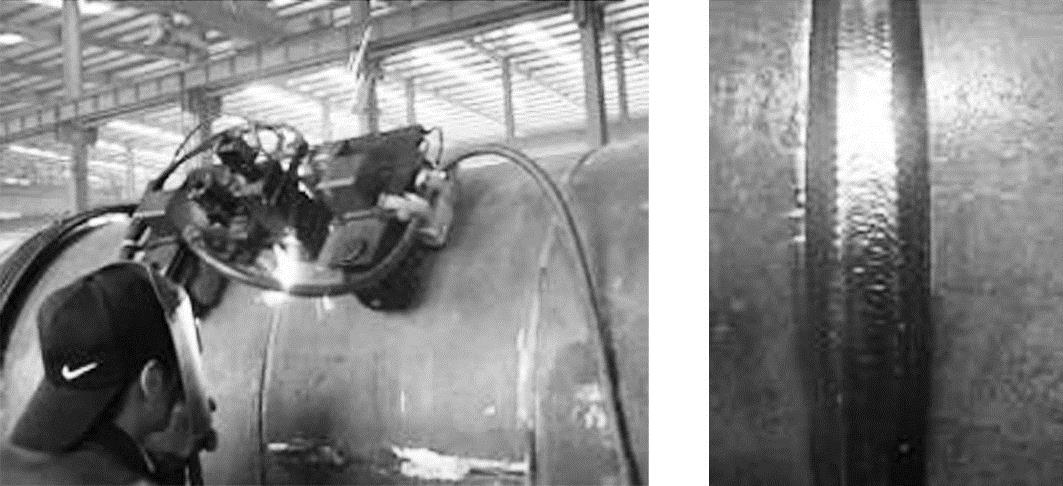
图12-27 管道焊接机器人全位置焊接效果
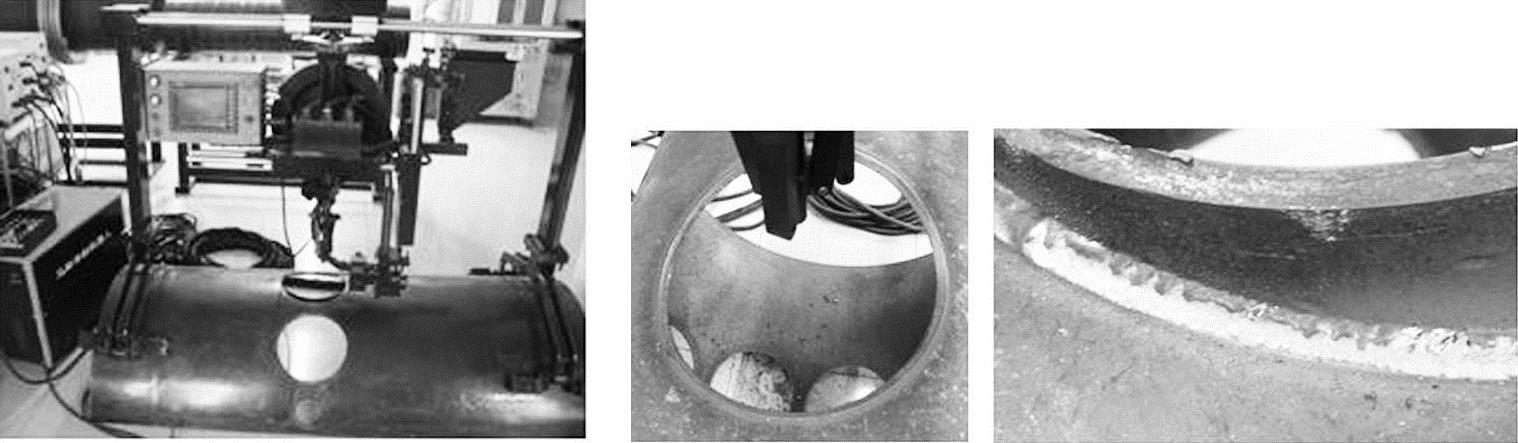
图12-28 马鞍焊割一体化机器人应用示例(左:装备;中:切割;右:焊缝)

图12-29 钢结构现场焊接机器人(左:方管;右:圆管)
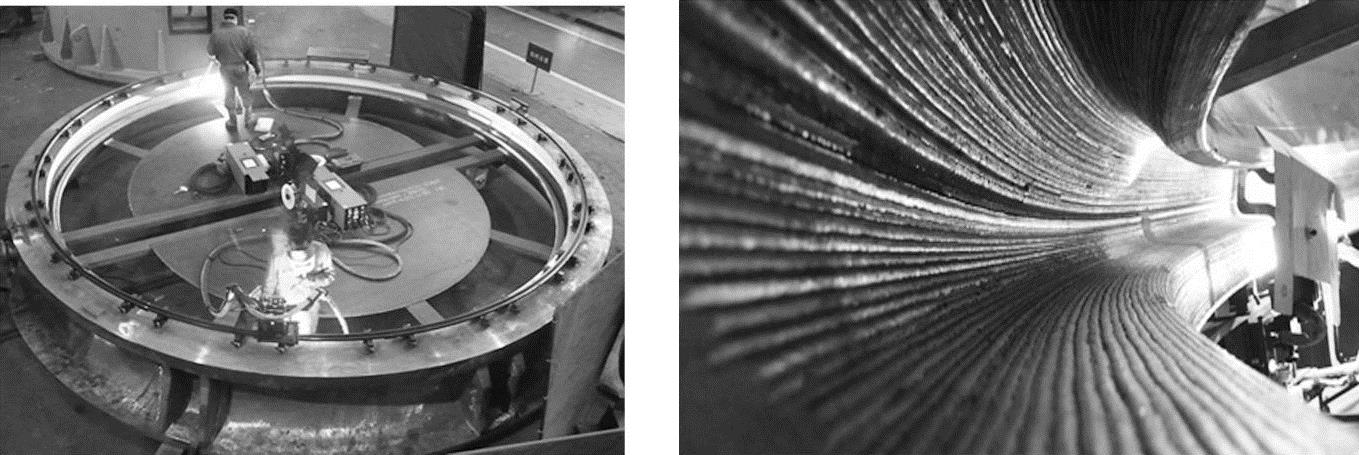
图12-30 核电汽轮机导流环自动堆焊机器人现场工作情况(左:装备;右:堆焊层)
方式完成CAN-open主从站的数据通信。海底管线铺设焊接机器人控制网络系统结构简单,具备开放性、同步性、可重构性、实时网络性等特点,可满足管道铺设高效可靠焊接的要求。
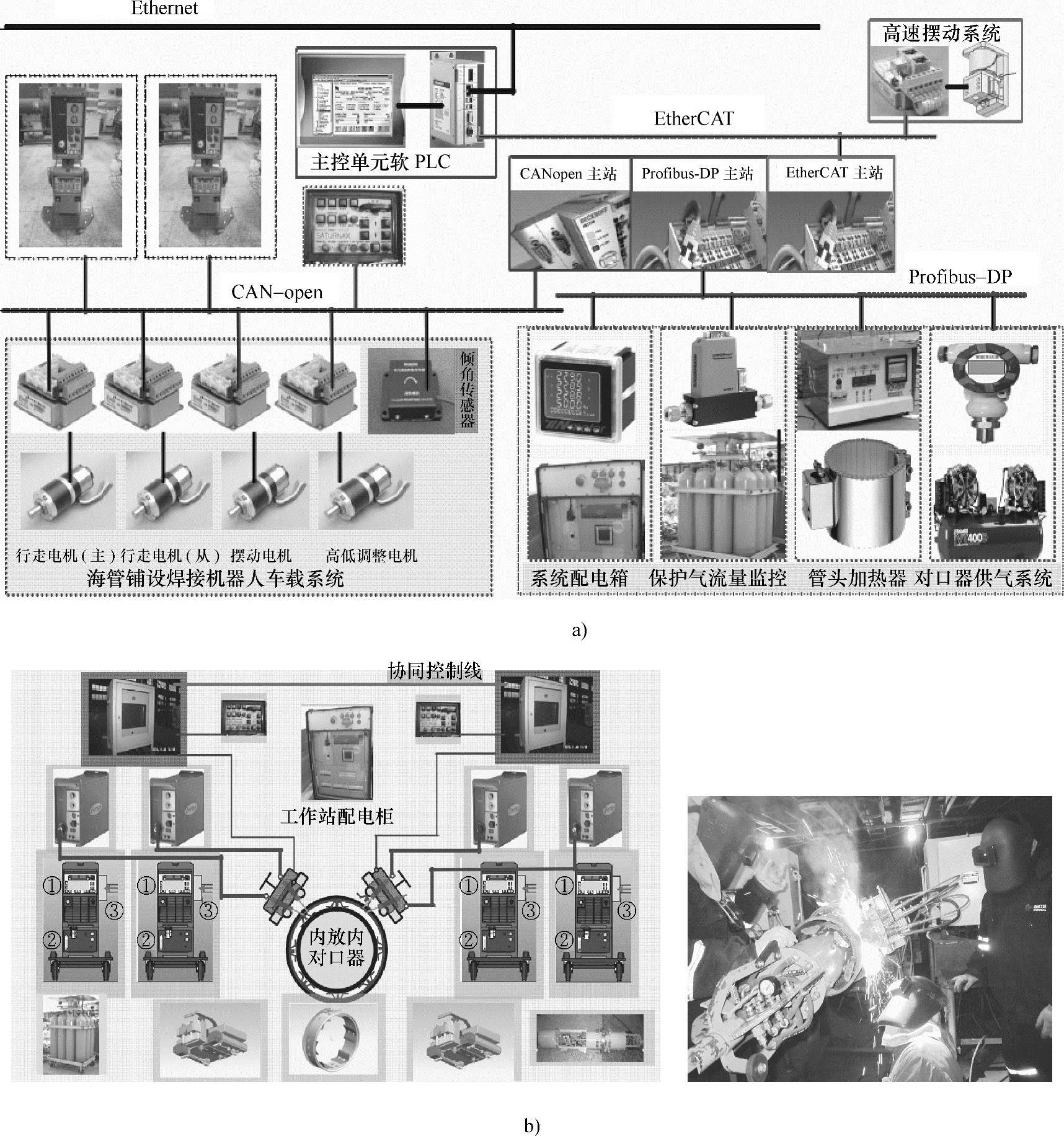
图12-31 海底铺管焊接机器人工作站
a)系统总体结构框图 b)焊接机器人装备及作业
为了满足大型焊接结构制造自动化的需求,移动式便携焊接机器人也已成为焊接机器人家族中新的成员,近年来国内外不断推出工业化产品。该类焊接机器人的特点是将视觉处理与机器人控制集成为一体,配有界面友好的示教盒、图形化的编程方式,确保系统易于在施工现场使用。除了具有焊缝跟踪功能外,激光视觉可以辅助机器人示教,精确测定焊枪的位置和角度。在焊接时,操作者可以专注于焊接过程并精细调整焊接参数。图12-32是该类焊接机器人的应用示例。
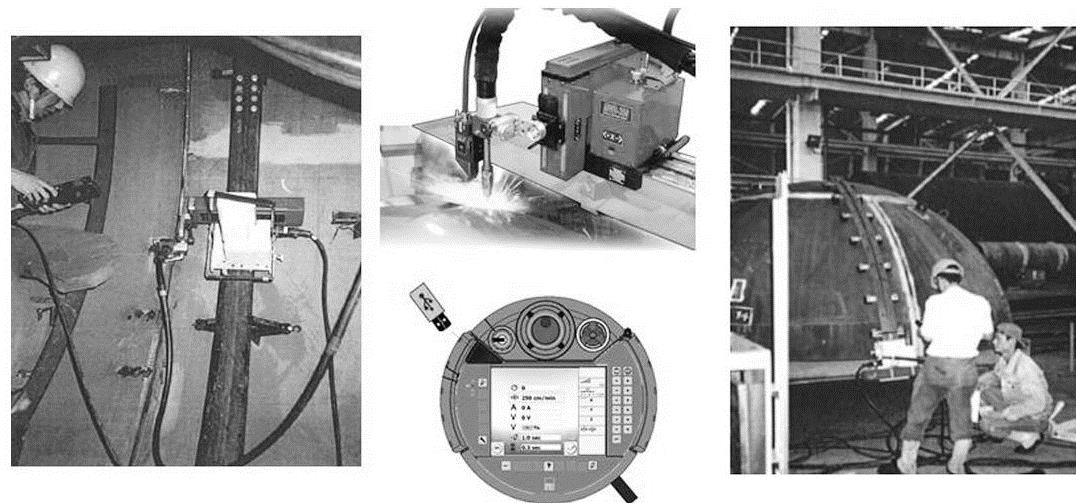
图12-32 界面友好的移动式便携机器人
有关焊接制造工程基础的文章

电阻点焊在汽车制造中应用最广,通常一辆货车有3500~4500个焊点,轿车和箱式汽车有8000~12000个焊点。在车身装焊和汽车零部件生产中,广泛采用工业机器人,用于电阻点焊、激光焊、螺柱焊、涂胶等。据统计,2015年我国拥有各类工业机器人13万台,占全世界正在服役工业机器人总量的8%,估计我国目前焊接机器人的安装数约6万台,汽车制造是焊接机器人的最大用户。......
2023-07-02

随着先进制造技术的发展,基于工业机器人技术的自动化、柔性化与智能化生产方式已成为制造现代化的主要标志。图12-21是根据焊接生产条件下对环境与过程信息获取、特征量提取、决策控制与优化以及质量检测等各环节的技术需求,提出的机器人智能化焊接系统应具备的基本功能。图12-21 机器人智能化焊接系统的基本功能......
2023-07-02
各种类型的微型化、智能化设备大量涌现,如数控焊接电源、智能焊机、焊接机器人等,计算机控制技术在焊接生产中的应用越来越广。焊接机器人是从事焊接的机器人,是一种多用途的、可重复编程的自动控制操作机,具有三个或更多可编程的轴,用于工业自动化领域。应用较普遍的焊接机器人有点焊机器人和电弧焊机器人两种。图7-30焊接机器人组成图图7-30焊接机器人组成图图7-31汽车生产线上的焊接机器人图7-31汽车生产线上的焊接机器人......
2023-06-24

自动编程技术的核心是焊接任务、焊接参数、焊接路径和轨迹的规划技术,主要包括以下方面:1)焊缝信息的自动获取:焊接特征提取和焊接特征建模技术。2)焊接顺序规划:规划多条焊缝的焊接顺序。4)焊接路径自动规划:规划焊接过程中焊枪位置和姿态。5)机器人自动放置规划:规划机器人和焊接路径之间的相对放置问题。图5-5-18 离线编程基本功能模块......
2023-06-26

机器人传感器是指能把智能机器人对内外部环境感知的物理量、化学量、生物量变换为电量输出的装置。智能机器人通过传感器实现某些类似于人类的知觉作用。机器人传感器可分为内部检测传感器和外部检测传感器两大类。电位器式位移传感器。1)力或力矩传感器机器人在工作时,需要有合理的握力,握力太小或太大都不合适,因此力或力矩传感器是某些特殊机器人中的重要传感器之一。机器人常用的力传感器可分为以下......
2023-06-26

现代意义的焊接技术出现在19世纪初的西方国家。1885年俄罗斯Benardos发明碳弧焊,1888年俄罗斯Slavianoff发明金属电极电弧焊,1890年法国出现了氧乙炔焊,从此焊接技术开始得到迅速发展,成为现代制造技术的重要组成部分。图1-1所示为焊接技术的重要发展历程。新材料及新结构的应用也促进了钎焊,胶接等先进连接技术的发展,甚至催生了熔钎焊、点焊胶接、激光胶焊等复合制造技术的应用。......
2023-07-02

如果有人突然告诉你,机器人其实是一个非常古老的事物,你是否感觉很吃惊呢?机器人的产生和发展是人类社会,特别是工业社会发展的客观要求,也是科学技术发展的必然结果。社会的需求是机器人生产的原动力。机器人是自动执行工作的机器装置。它的任务是协助或取代人类的工作,如生产业、建筑业或是危险环境的工作。......
2023-06-26

焊接机器人突破了焊接刚性自动化的传统生产方式,开拓了一种柔性自动化生产方式,使小批量产品自动化焊接生产成为可能。典型的焊接机器人组成如图8-9所示。为了使机械手充分发挥效能,焊接机器人系统通常采用两台变位机,当其中一台进行焊接作业时,另一台则完成工件的装卸,从而提高整个系统效率。控制器负责处理焊接机器人工作过程中的全部信息和控制其全部动作。此外,还有激光焊接机器人。......
2023-06-26
相关推荐