焊接智能制造是一种由智能机器和人类专家共同组成的人机一体化系统。与传统制造相比,焊接智能制造系统应具有以下几方面的特征:1)设计优化能力。它是焊接智能制造的一个显著特征,是实现高水平人机一体化的关键技术之一。图12-5概括了作为智能焊接制造系统必须具备的感知、决策、控制、学习、通信五大基本功能。......
2023-07-02
随着先进制造技术的发展,基于工业机器人技术的自动化、柔性化与智能化生产方式已成为制造现代化的主要标志。焊接是工业机器人应用的一个主要领域,从20世纪60年代工业机器人的诞生到现在,焊接机器人的应用模式已经历了示教再现、离线编程和自主规划三个阶段。目前在役的焊接机器人基本都属于第一或第二阶段,其焊接参数及运行轨迹均是在焊接生产前预先示教后再在生产过程中重现,对焊接作业条件的稳定性和工件尺寸的一致性要求严格,尚不具备对环境与工况的自适应能力,在生产应用中并不能保证一定可以获得满意的焊接质量。这是因为在实际焊接过程中,焊接条件经常会发生变化,例如,零部件加工和装配的误差会造成焊缝位置和尺寸的偏差,焊接过程中工件受热及散热条件改变会导致焊道变形和熔透不均匀,网压波动造成焊接电源输出不稳以及导电嘴磨损、送丝阻力等一些随机因素的影响。为了克服机器人焊接过程中各种不确定因素对焊接产品质量的随机影响,提高机器人作业的可靠性和自适应性,要求机器人焊接系统不仅能实现对待焊位置的自动跟踪,而且还能实现焊接参数的在线调整和焊缝质量的实时控制,形成了由单机示教再现型向多传感、自主规划以及多机协同作业等方向的发展趋势。图12-21是根据焊接生产条件下对环境与过程信息获取、特征量提取、决策控制与优化以及质量检测等各环节的技术需求,提出的机器人智能化焊接系统应具备的基本功能。
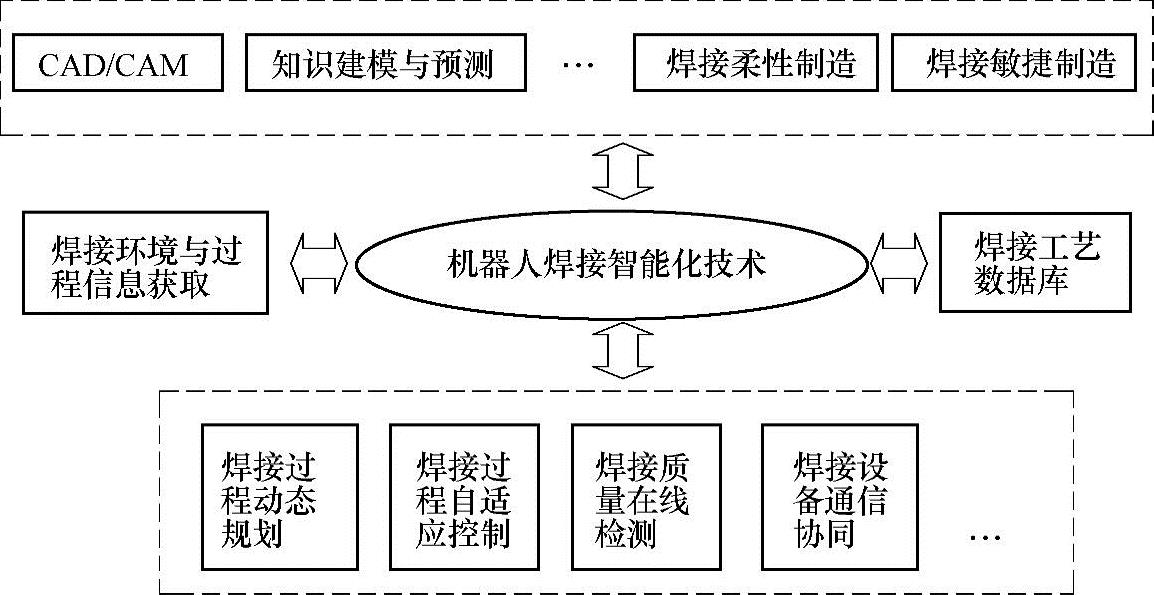
图12-21 机器人智能化焊接系统的基本功能
有关焊接制造工程基础的文章

焊接智能制造是一种由智能机器和人类专家共同组成的人机一体化系统。与传统制造相比,焊接智能制造系统应具有以下几方面的特征:1)设计优化能力。它是焊接智能制造的一个显著特征,是实现高水平人机一体化的关键技术之一。图12-5概括了作为智能焊接制造系统必须具备的感知、决策、控制、学习、通信五大基本功能。......
2023-07-02

电阻点焊在汽车制造中应用最广,通常一辆货车有3500~4500个焊点,轿车和箱式汽车有8000~12000个焊点。在车身装焊和汽车零部件生产中,广泛采用工业机器人,用于电阻点焊、激光焊、螺柱焊、涂胶等。据统计,2015年我国拥有各类工业机器人13万台,占全世界正在服役工业机器人总量的8%,估计我国目前焊接机器人的安装数约6万台,汽车制造是焊接机器人的最大用户。......
2023-07-02

由传统焊接向现代焊接的战略转型和核心技术的实质提升,是使焊接制造的难点从“控形”转为“控性”。而对焊接接头的性能、热影响区组织、冶金缺陷、焊接过程与焊后整体构件的应力与变形等“控性”能力的提高,已成为当前和未来焊接制造中迫切需要解决的核心技术,这也正是信息与智能技术所面对的巨大开拓空间和发展前景。......
2023-07-02

1959年,美国人制造出世界上第一台工业机器人,此后,机器人在工业领域逐渐普及开来。随着科技的不断进步,特别是工业3.0的到来,广泛采用工业机器人的自动化生产线已成为制造业的核心装备。在这些场合人机协作机器人将发挥越来越大的作用。图5-3人机协作场景不仅如此,智能制造的发展要求人和机器的关系发生更大的改变。如果忽视了智能机器人的研发与推广,整个《中国制造2025》发展战略可能会从根基上动摇。......
2023-06-23

从智能设计到智能加工、智能装配、智能服务,进而实现智能制造。图1-9制造环节智能化通过机器换人,实现流水作业智能化,实现制造过程物质流、信息流、能量流和资金流的智能化。通过机器换人,利用机械手、自动化控制设备或流水线自动化推动企业技术改造向机器化、自动化、集成化、生态化、智能化发展,实现制造过程物质流、信息流、能量流和资金流的智能化。......
2023-06-23

焊后,对储罐所有的环缝、纵缝进行渗透检测及100%X射线无损检测,未发现任何焊接缺陷,质量合格。1)焊接设备为法国Polysoude公司生产的窄间隙TIG焊接系统,由PC600直流焊接电源、热丝电源、冷却系统、NG焊枪和WP焊枪构成的焊接机头、送丝机、控制系统、焊接机床及操作机等构成。图7-62 窄间隙热丝TIG焊接接头坡口3)焊接时,先用NG焊枪进行打底焊,并填充至坡口深度40mm处,然后用WP焊枪继续焊接,填满整个坡口并进行盖面。......
2023-07-02
3D打印技术是一项多学科交叉、具有绿色智能特征的前沿先进制造技术,实现了设计图形数据直接生产实物的快速制造。焊接的堆焊工艺应被认为是3D打印的前驱。日、美一些公司已经将精密铣削技术和金属部件3D打印技术融合,实现复杂零部件的快速制造。......
2023-07-02

智能制造把制造自动化的概念更新,扩展到柔性化、高度集成化和智能化。智能制造的核心构成要素包含智能设计、智能产品、智能生产、智能管理、智能服务。同时,使产品制造模式、生产组织模式以及企业商业模式等众多方面发生根本性的变化,它将引发制造业的革命性变化,形成新的智能制造模式。......
2023-06-28
相关推荐