如何提高断路器的开断速度是低压断路器研究的一个重点,这里采用优化和改进操作机构来达到这个目的,优化分析的具体方法与前述塑壳断路器相同。图2-49为不同刚度系数下的动触头的速度。各个轴的位置对开断速度的影响这部分工作通过ADAMS软件提供的设计研究来进行。由此,对DW45操作机构进行分析,以敏感度较大的5个变量为基础,进行机构的优化。......
2023-06-15
由第七章和第八章可知,操动机构是高压开关的重要组成部分。带触头的开关电器,只有通过触头的分、合动作才能达到开断与关合电路的目的,因此必须依靠一定的机械操动系统才能完成。目前,高压开关在现场运行中所出现的较多问题就是机构问题,弹簧机构、气动机构以及液压机构零部件多、动作分散性大、不易精确控制。为了实现智能操动的目的,操动机构必须结构简单、零部件少、寿命长、可靠性高、运动过程可控,上述两章介绍的永磁机构和电机机构动作元件只有一个,从原理上讲可以实现智能控制。
关于永磁机构和电机机构本体的动作原理前面已经做了详细的介绍,下面主要介绍电机机构的控制原理。
如前所述,电机机构是近年来备受关注的一种新型机构,它是一种用于中、高压断路器的电子控制、电机驱动的操动机构(简称电机机构)。电机机构利用电容储能,电机取代了链条、液压油、压缩空气、阀门及管道等传统的能量传递装置。由于其具有结构简单、寿命长、可靠性高、运动过程可控的特点,可以很好地满足智能电器对机构的要求。
按照驱动电机运动方式不同,可分为旋转电机机构和直线电机机构。图11-3和图11-4所示驱动电机分别为旋转电机和直线电机的电机机构结构图。按照驱动电机种类来分,可分为永磁无刷直流电机,永磁同步电机和三相异步电机。
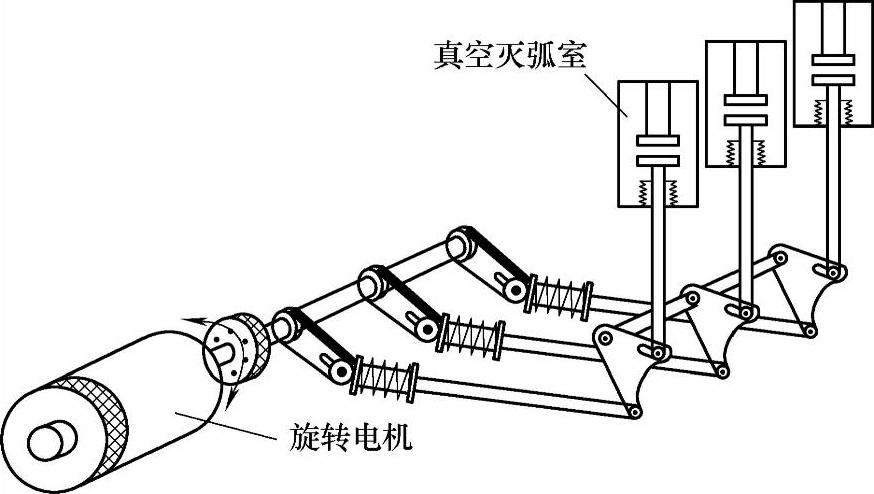
图11-3 旋转电机机构结构图
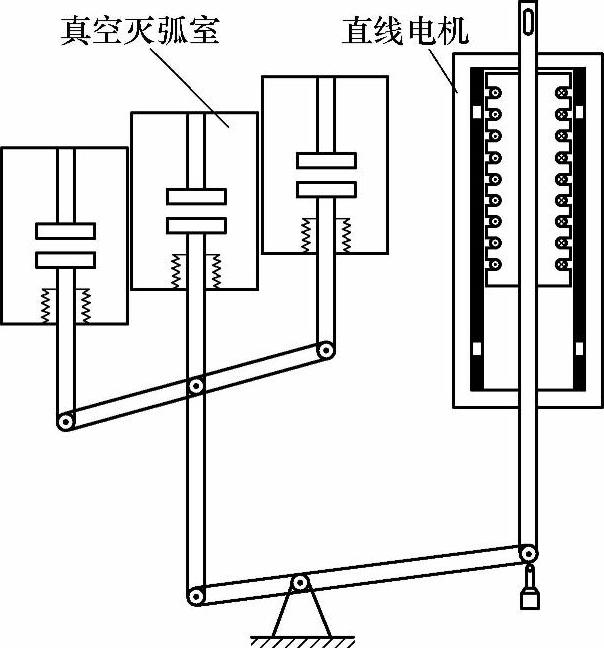
图11-4 直线电机机构结构图
电机机构驱动系统各部分的原理如图11-5所示。上位机通过输入/输出单元将触发信号传递给控制单元,由控制单元控制电源单元对储能单元中的储能电容器组进行充电,同时对逆变单元进行供电,当充电电压达到设定值时停止对电容器组充电。控制单元对逆变单元进行控制,使得电机操动机构驱动高压开关进行分、合闸操作,同时控制单元接收反馈单元发送的电机位置信号和预设行程曲线比较,若反馈单元给出电机的行程曲线偏离了预设行程曲线,则控制单元发出信号给逆变单元,使之调节电机的供电电压,以纠正偏差,确保高压开关总是按所要求的行程曲线工作。同时控制单元通过输入/输出单元将操作过程中驱动电机运动曲线及高压开关的状态信息传递给上位机。
1.驱动电机
电机机构用电机取代了传统的能量传动装置,例如链条、液压油、压缩空气、阀门及管道。驱动电机可以选用直流电机或交流电机,电机一般为特殊设计,旋转角度与所配断路器类型相适应,且不超过180°。有限旋转角度的优点如下:可优化行程曲线;无需分、合闸缓冲器(缓冲可由控制单元实现);易调节,更好地适应不同断路器。
2.电容器组
电机机构采用电容器组作为储能单元,当断路器动作时,电容器组最大限度地减少对电源的冲击。它取代了传统的能量存储单元,如弹簧和压缩空气。
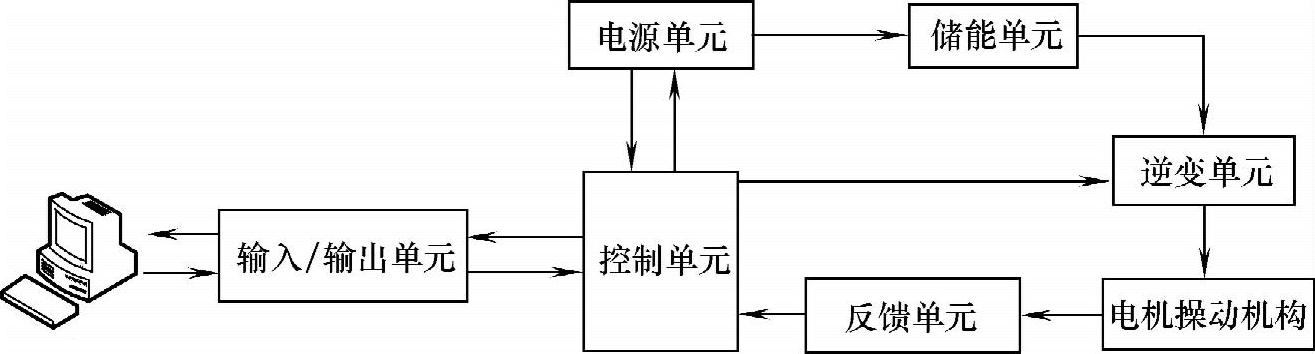
图11-5 电机机构驱动系统各部分的原理图
3.控制单元
基于微处理器的控制单元可从驱动电机中收集数据,控制单元装有附加数据存储装置,记录各种数据,诸如断路器行程曲线及历史监测记录。控制单元通过传感器与电机相连,得到电机的准确转角或行程,如果断路器的行程曲线偏离了预设行程曲线,则控制单元发出信号给变流器,此信号使之调节电机的电压电流,以纠正偏差。通过这种反馈回路,确保断路器总是按所要求的行程曲线工作。这使得运动系统的缓冲变得很容易,只需要改变电机电流方向即可,无需附加缓冲器。
4.输入/输出单元
输入/输出单元作为电机机构和用户之间的联系,它将从电机机构而来的监视信息传给用户,如充电水平,断路器分、合闸状态,电机机构电流行程等。还可以将用户的控制信号传递给控制单元,以执行相应的操作。
电机驱动操动机构作为高压断路器一种全新且通用的机构,有如下优点:
1)仅有一个运动部件,结构简单,可靠性高。
2)自定义的预定行程曲线。
3)不受设备老化和环境温度的影响。
4)自带状态监测功能,无需提供额外传感器。
5)无需机械辅助触头。
6)负荷小,能量消耗低,对电网冲击小。
7)模块化设计。
8)所有与变电站连接的开关设备均可受一个可编程电路板控制。
有关现代高压电器技术的文章

如何提高断路器的开断速度是低压断路器研究的一个重点,这里采用优化和改进操作机构来达到这个目的,优化分析的具体方法与前述塑壳断路器相同。图2-49为不同刚度系数下的动触头的速度。各个轴的位置对开断速度的影响这部分工作通过ADAMS软件提供的设计研究来进行。由此,对DW45操作机构进行分析,以敏感度较大的5个变量为基础,进行机构的优化。......
2023-06-15

弹簧贮能式操动机构品种较多,在工厂企业10kV及以下的断路器常采用CT7型。跳闸完成后,SA自动复位,其1、2触点断开,切断跳闸回路。值班人员得知事故信号后,可将控制开关SA向跳闸方向扳转,使SA的触点与QF的辅助触点恢复对应关系,解除事故信号。图2-96弹簧操动的断路器控制、信号线路......
2023-06-20

所以,目前大多数剑杆织机已不采用叉入式剑杆引纬这种方式。夹持式剑杆引纬大大减少了叉入钩出式剑杆头对纬纱摩擦,适于高速引纬,但其剑杆头的结构比较复杂。刚性剑杆织机采用叉入式或夹持式剑头,其刚性剑杆一般用铝合金、碳纤维或复合材料制成,其最大的特点是无须剑杆导向件,在引纬时可以悬在梭口中运动,不与上下层经纱接触,从而减少了对经纱的摩擦。剑轮作往复转动,使剑杆带作进出梭口的运动,进行引纬。......
2023-06-16

合闸完毕,松开SA,SA自动复位,其1、2触点断开,断路器QF的常闭辅助触点也断开,KM失电释放,退出运行。跳闸:将控制开关SA逆转45°,其7、8触点闭合,跳闸线圈YR得电,使断路器跳闸。此时事故音响信号回路接通,发出报警信号。值班人员得知事故信号后,可将控制开关SA向跳闸方向扳转,使SA的触点与QF的辅助触点恢复对应关系,解除事故信号。图2-97电磁操动的断路器控制、信号线路......
2023-06-20

CT8型弹簧操动机构常与SN10型少油断路器等配套使用,其典型控制线路如图2-99所示。前三个问题属于CT8合闸线路的固有缺陷。图2-99CT8型操动机构典型控制线路图2-100CT8型操动机构改进线路典型CT8合闸线路的缺陷还表现在开关S上,当S处于打开位置时,电动机M失电,储能指示灯(黄色)H3熄灭。改进后的线路取消中间继电器KA,用电动机终端开关SQ3代替,并在SQ3触点上并联电容,从而解决了问题①。该线路同样适用于在交流控制线路中推广。......
2023-06-20

沈卫明对面向智能体的设计和分析方法进行了详细的阐述: AODM 是采用基于角色的系统分解方法, 系统中角色及其关系的分析有助于智能体类的识别; 对每个智能体类进行的功能分析可以用来定义智能体所提供或使用的服务、 行为以及智能体之间的交互; 对智能体的产生、 存在时间、 扮演的角色等定义确定了智能体间的控制关系。而AODM 设计方法也是继面向对象OO设计方法之后成为新一代的软件开发方法。......
2023-06-20
如图2-1所示,智能制造系统的整体架构可分为五层。控制系统主要包括适用于流程制造的过程控制系统、适用于离散制造的单元控制系统和适用于运动控制的数据采集与监控系统。图2-1智能制造系统架构3.PLM系统层它主要分为研发设计、生产和服务三个环节。......
2023-06-23

操动机构是断路器的重要附属设备,它的好坏直接影响断路器的工作性能,因此在交接和大修时必须对操动机构进行相应的试验。图12-9 操动机构最低动作电压试验接线图2)将断路器闭合,常开触头KM1闭合。表12-5 断路器操动机构动作情况检查项目(续)......
2023-06-27
相关推荐