【摘要】:进入模型运动模拟工作台操作参见1.3。图16-4 对话框选择内环零件中的圆弧草图作为;选择滚子零件中的圆弧草图作为。模拟滚动曲线铰单击工具栏内的图标,出现对话框。在对话框内拖动滑标,改变角度范围。保存该装配部件。定义滚动曲线铰本身不复杂,但因为涉及到其他铰和零件之间的运动关系,相对位置关系容易搞混。但本章模拟的运动关系是通常见到的轴承滚子运动,应该很容易理解接受。
本节定义滚动曲线铰,然后定义一个旋转铰,最后定义固定零件,并对定义的机构进行运动模拟。
(1)进入模型运动模拟工作台
操作参见1.3(1)。
(2)定义滚动曲线铰
单击【DMU运动机构】工具栏内的滚动曲线接合图标 ,要单击这个图标,需要先单击
,要单击这个图标,需要先单击 图标右下方的箭头,出现所有铰定义图标。单击图标
图标右下方的箭头,出现所有铰定义图标。单击图标 后,出现【创建接合:滚动曲线】对话框,如图16-4所示。单击对话框内的【新机械装置】按钮,出现【创建机械装置】对话框。按照对话框内的机构名称【机械装置.1】,单击对话框内的【确定】按钮,生成新的运动机构,同时【创建机械装置】对话框关闭,回到【创建接合:滚动曲线】对话框。
后,出现【创建接合:滚动曲线】对话框,如图16-4所示。单击对话框内的【新机械装置】按钮,出现【创建机械装置】对话框。按照对话框内的机构名称【机械装置.1】,单击对话框内的【确定】按钮,生成新的运动机构,同时【创建机械装置】对话框关闭,回到【创建接合:滚动曲线】对话框。
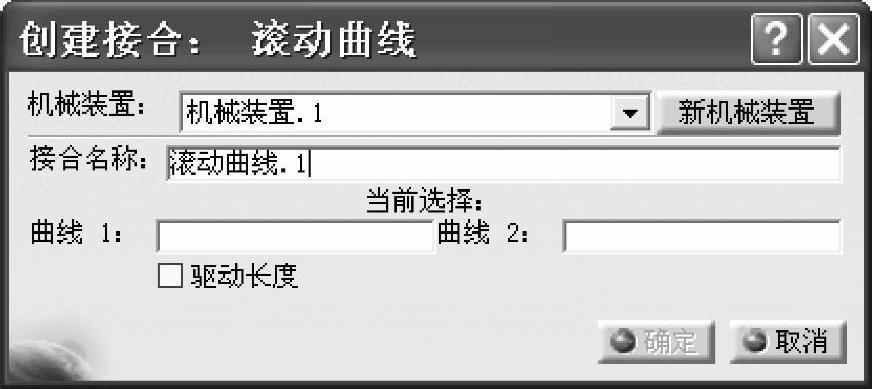
图16-4 【创建接合:滚动曲线】对话框
选择内环零件中的圆弧草图作为【曲线1】;选择滚子零件中的圆弧草图作为【曲线2】。在【创建接合:滚动曲线】对话框内,更新了选项内容。单击对话框内的【确定】按钮,生成滚动曲线铰,同时在左边的模型树中出现机构名称和铰的名称。
单击【DMU运动机构】工具栏内的图标 ,出现【创建接合:滚动曲线】对话框,如图16-4所示。在图形区分别选择外环和滚子的圆弧曲线草图作为【曲线1】和【曲线2】。单击对话框内的【确定】按钮,生成滚动曲线铰。
,出现【创建接合:滚动曲线】对话框,如图16-4所示。在图形区分别选择外环和滚子的圆弧曲线草图作为【曲线1】和【曲线2】。单击对话框内的【确定】按钮,生成滚动曲线铰。
(3)生成旋转铰
单击【DMU运动机构】工具栏内的旋转铰图标 ,出现【创建接合:旋转】对话框。在图形区分别选择内环和外环零件的轴线水平线段作为【直线1】和【直线2】。在左边的模型树上分别选择两条线段所在零件的【zx平面】。在【创建接合:旋转】对话框内选中【驱动角度】。单击对话框内的【确定】按钮,生成旋转铰。
,出现【创建接合:旋转】对话框。在图形区分别选择内环和外环零件的轴线水平线段作为【直线1】和【直线2】。在左边的模型树上分别选择两条线段所在零件的【zx平面】。在【创建接合:旋转】对话框内选中【驱动角度】。单击对话框内的【确定】按钮,生成旋转铰。
(4)定义固定零件
单击【DMU运动机构】工具栏内的图标 ,出现【新固定零件】对话框。在图形区单击选择内环零件,出现一个消息框,提示现在设置的机构可以被模拟。单击消息框内的【确定】按钮,关闭消息框。
,出现【新固定零件】对话框。在图形区单击选择内环零件,出现一个消息框,提示现在设置的机构可以被模拟。单击消息框内的【确定】按钮,关闭消息框。
(5)模拟滚动曲线铰
单击【DMU运动机构】工具栏内的图标 ,出现【运动模拟-机械装置.1】对话框。在对话框内拖动滑标,改变角度范围。单击对话框内的【向前】按钮,滚子在内外环之间开始运动,同时外环转动。
,出现【运动模拟-机械装置.1】对话框。在对话框内拖动滑标,改变角度范围。单击对话框内的【向前】按钮,滚子在内外环之间开始运动,同时外环转动。
单击运动模拟对话框内的【重置】按钮,使滑块复位到原点。单击运动模拟对话框内的【关闭】按钮,将对话框关闭。保存该装配部件。
总结:
本章模拟包含两个铰的运动机构,涉及到的零件有3个实体零件。定义滚动曲线铰本身不复杂,但因为涉及到其他铰和零件之间的运动关系,相对位置关系容易搞混。但本章模拟的运动关系是通常见到的轴承滚子运动,应该很容易理解接受。





相关推荐