本节只是简单地设置平面铰,没有对平面铰进行模拟。实际设计工作中的平面铰,往往不是单独使用的,而是与其他运动机构相联。设置平面铰只是约束运动件仅在某个平面内做二维运动,而不能超出平面做三维空间运动。击CATIA界面上面的→→,进入工作台。单击工具栏内的平面接合图标,要单击这个图标,需要先单击图标右下方的箭头,出现所有铰定义图标。零件按平面铰接配合在一起,同时在左边的模型树中出现机构名称和铰的名称。......
2023-07-01
本节定义万向节铰。由于万向节铰在设备中也是和其他铰结合在一起使用的,本章没有对万向节铰进行运动模拟。
(1)进入模型运动模拟工作台
操作参见1.3(1)。
(2)定义万向节铰
单击【DMU运动机构】工具栏内的通用接合图标 ,要单击这个图标,需要先单击旋转接合图标
,要单击这个图标,需要先单击旋转接合图标 右下方的箭头,出现所有铰定义图标。单击【通用接合】图标
右下方的箭头,出现所有铰定义图标。单击【通用接合】图标 后,出现【创建接合:u形接合】对话框,如图9-4所示。单击对话框内的【新机械装置】按钮,出现【创建机械装置】对话框。按照对话框内的机构名称【机械装置.1】,单击对话框内的确定按钮,生成新的运动机构。同时【创建机械装置】对话框关闭,回到【创建接合:u形接合】对话框。
后,出现【创建接合:u形接合】对话框,如图9-4所示。单击对话框内的【新机械装置】按钮,出现【创建机械装置】对话框。按照对话框内的机构名称【机械装置.1】,单击对话框内的确定按钮,生成新的运动机构。同时【创建机械装置】对话框关闭,回到【创建接合:u形接合】对话框。
在第一个轴零件中选择轴的中心线;在第二个轴零件中选择轴的中心线;在第一个轴上选择一个棱边作为十宇销轴线方向。选择后对话框根据选择内容更新。单击对话框内的【确定】按钮,生成万向节铰。零件按万向节铰配合在一起,同时在左边的模型树中出现机构名称和铰的名称。
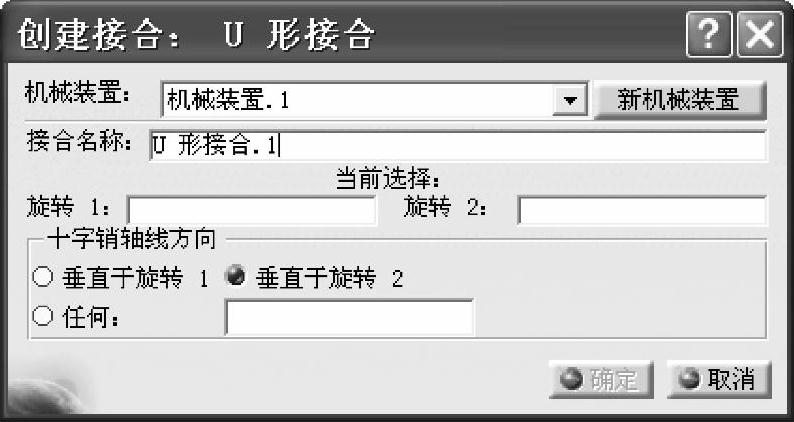
图9-4 【创建接合:u形接合】对话框
总结:
本章讲解的是定义万向节铰。在零件设计阶段,涉及到一个新的功能:在对实体进行开槽处理时,可以使用相反的边。这样设计的草图,会更加简约,请读者仔细体会。本章只定义了万向节铰,没有对其进行模拟运动。要模拟运动,必须还要结合其他铰,如旋转铰等。
本章中没有做出两个轴之间的联接件——销轴,因为本章中的两个零件,更容易说明万向节铰。如果加入销轴,则更象是固支铰了。读者可以自己加入销轴。为了贴近万向节铰,可以把轴的直径设计的小一些,销相对于两个轴都有一定的偏心。
有关CATIAV5r21运动分析教程的文章

本节只是简单地设置平面铰,没有对平面铰进行模拟。实际设计工作中的平面铰,往往不是单独使用的,而是与其他运动机构相联。设置平面铰只是约束运动件仅在某个平面内做二维运动,而不能超出平面做三维空间运动。击CATIA界面上面的→→,进入工作台。单击工具栏内的平面接合图标,要单击这个图标,需要先单击图标右下方的箭头,出现所有铰定义图标。零件按平面铰接配合在一起,同时在左边的模型树中出现机构名称和铰的名称。......
2023-07-01

本节将两个零件设置为球铰。进入模型运动模拟工作台操作参见1.3。在球形零件中选择球的球心,在固定球架零件中选择半球的球心。单击对话框内的按钮,生成球铰。图7-4 铰对话框总结:本章是设计球铰,球铰允许接触的零件三个自由度的转动,但约束三个自由度的平动。因为球铰一般不单独使用,本章最后对设置的球铰没有进行运动模拟。......
2023-07-01

先设置两个棱镜铰,然后在两个棱镜铰之间生成缆绳铰。设置完成后模拟缆绳铰的运动。进入模型运动模拟工作台操作参见1.3。定义缆绳铰单击工具栏内的电缆接合图标后,出现对话框。在模型树上选择前面设计的两个铰,在对话框内将和选中,单击对话框内的按钮,生成缆绳铰。在图形区单击选择滑动架零件,出现一个消息框,提示现在设置的机构可以被模拟。在对话框内拖动滑标,改变距离范围。保存该装配部件。......
2023-07-01

本节定义点曲面铰。点是笔零件笔尖上的点,曲面是17.1节生成的多截面曲面。本节没有对定义好的点曲面铰进行模拟运动分析。在对话框,更新了选项内容。图17-8 选择曲面作为,选择铅笔顶点作为总结:本章学习的是点曲面铰的设置。本章的新内容除定义点曲面铰外,还有定义多个参考平面,定义多截面曲面,特别是多截面曲面的定义,由于曲线草图的方向问题,肯定一次无法完成曲面的生成,要反复调整草图的方向。......
2023-07-01

设置齿轮铰单击工具栏内的齿轮接合图标,要单击这个图标,需要先单击旋转接合图标右下方的箭头,出现所有铰定义图标。图10-3 对话框模拟齿轮铰运动单击工具栏内的使用命令进行模拟图标,出现对话框。细心的读者可能会发现,本章设置的齿轮铰有些问题,虽然轴是固定不动的,但齿轮铰转动时,齿轮会和轴上的键发生干涉。更准确的设置是轴和齿轮为刚性铰,而轴再单独和一个轴承或者轴承套设置为旋转铰。......
2023-07-01

本节设置旋转铰运动,指定轴套为固定件,最后模拟设置的旋转铰。进入模型运动模拟工作台操作参见1.3。设置旋转铰单击工具栏内的旋转接合图标,出现对话框,如图3-3所示。单击工具栏中的保存图标,将该装配部件保存。除旋转铰是新内容外,本章在开键槽时还讲解了对零件中的元素进行环形排列,这两个是本章的新内容。......
2023-07-01

在本节设置滑动铰。设置滑块零件在固定架零件上滑动,将固定架零件设置为固定不动,最后模拟定义的滑动铰。进入模型运动模拟工作台单击CATIA界面的→→,进入工作台。光标放在罗盘的W轴上,移动鼠标将滑块零件向上移动,使滑块与支架离开一定距离。定义棱镜铰单击工具栏内的棱形接合图标,要单击这个图标,需要先单击旋转接合图标右下方的箭头,单击后出现所有铰定义图标,如图1-4所示。图1-12 对话框图1-13 对话框内拖动滑标改变距离范围......
2023-07-01
进入模型运动模拟工作台操作参见1.3。同时对话框关闭,回到对话框。零件按铰接配合在一起,同时在左边的模型树中出现机构名称和铰的名称。在图形区单击选择外套零件,出现一个消息框,提示现在设置的机构可以被模拟。模拟圆柱铰运动单击工具栏内的使用命令进行模拟图标,出现对话框。单击工具栏中的保存图标,将该装配部件保存。......
2023-07-01
相关推荐