将21.1节的曲柄零件和21.2节的固定轴架零件导入装配工作台内,如图21-8所示。定义第二个旋转铰单击CATIA界面上面的→→,进入工作台。图21-9 导入装配图中的椭圆尺零件单击工具栏内的图标,出现对话框。零件按铰接配合在一起。在对话框内选中,在图形区内的旋转铰位置显示旋转箭头。关闭对话框后出现一个消息框,提示现在设置的机构可以被模拟。图21-11 在固定轴架零件中选择凹槽的一个棱边图21-12 在滑块零件中选择一条对应的棱边......
2023-07-01
先设置两个棱镜铰,然后在两个棱镜铰之间生成缆绳铰。注意,虽然称为缆绳铰,但在两个棱镜铰之间并没有缆绳存在。设置完成后模拟缆绳铰的运动。
(1)进入模型运动模拟工作台
操作参见1.3(1)。
(2)定义棱镜铰
单击【DMU运动机构】工具栏内的棱形接合图标 。要单击这个图标,需要先单击旋转接合图标
。要单击这个图标,需要先单击旋转接合图标 右下方的箭头,单击后出现所有铰定义图标。单击棱形接合图标
右下方的箭头,单击后出现所有铰定义图标。单击棱形接合图标 后,出现【创建接合:棱形】对话框,如图6-4所示。单击对话框内的【新机械装置】按钮,出现【创建机械装置】对话框。按照对话框内的机构名称【机械装置.1】,单击对话框内的确定按钮,生成新的运动机构。同时【创建机械装置】对话框关闭,回到【创建接合:棱形】对话框。
后,出现【创建接合:棱形】对话框,如图6-4所示。单击对话框内的【新机械装置】按钮,出现【创建机械装置】对话框。按照对话框内的机构名称【机械装置.1】,单击对话框内的确定按钮,生成新的运动机构。同时【创建机械装置】对话框关闭,回到【创建接合:棱形】对话框。
将鼠标移动到罗盘的原点,按下鼠标左键移动罗盘,将罗盘放在滑块零件上。光标放在罗盘的W轴上,移动鼠标将滑块零件向上移动,使滑块与滑动架离开一定距离。
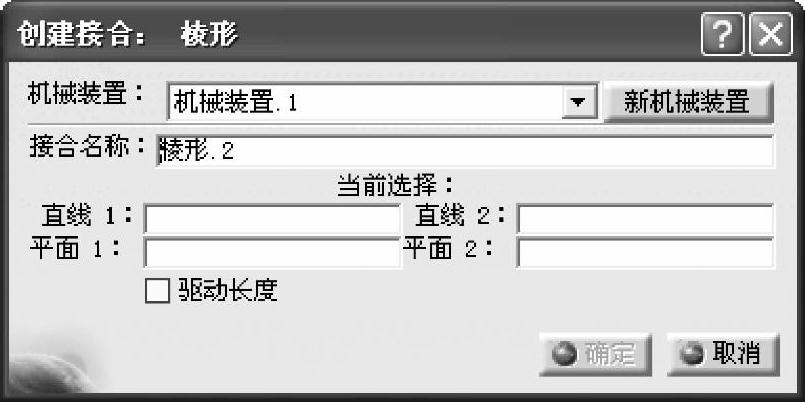
图6-4 【创建接合:棱形】对话框
在滑块零件中选择下表面的一个棱边。在滑动架零件中选择一条对应的棱边。在滑块零件中选择下表面。在滑动架零件中选择对应表面。在【创建接合:棱形】对话框内单击【确定】按钮,生成棱镜铰。零件按铰接配合在一起。同时在左边的模型树中出现机构名称和铰的名称。用同样的方法设置另外一个滑块与滑动架之间的棱镜铰,设置时显示【创建接合:棱形】对话框。两个棱镜铰设置完成,同时在左边的模型树上显示两个铰的名称。
(3)定义缆绳铰
单击【DMU运动机构】工具栏内的电缆接合图标 后,出现【创建接合:电缆】对话框。在模型树上选择前面设计的两个铰,在对话框内将【菱形1的驱动长度】和【菱形2的驱动长度】选中,单击对话框内的【确定】按钮,生成缆绳铰。
后,出现【创建接合:电缆】对话框。在模型树上选择前面设计的两个铰,在对话框内将【菱形1的驱动长度】和【菱形2的驱动长度】选中,单击对话框内的【确定】按钮,生成缆绳铰。
(4)定义固定零件
单击【DMU运动机构】工具栏内的固定零件图标 ,出现【新固定零件】对话框。在图形区单击选择滑动架零件,出现一个消息框,提示现在设置的机构可以被模拟。单击消息框内的【确定】按钮,关闭消息框。
,出现【新固定零件】对话框。在图形区单击选择滑动架零件,出现一个消息框,提示现在设置的机构可以被模拟。单击消息框内的【确定】按钮,关闭消息框。
(5)模拟运动铰
单击【DMU运动机构】工具栏内的使用命令进行模拟 图标,出现【运动模拟-机械装置.1】对话框。在对话框内拖动滑标,改变距离范围。单击对话框内的【向前】按钮,两个滑块在滑动架上开始运动。
图标,出现【运动模拟-机械装置.1】对话框。在对话框内拖动滑标,改变距离范围。单击对话框内的【向前】按钮,两个滑块在滑动架上开始运动。
单击运动模拟对话框内的【重置】按钮,使滑块复位到原点。单击运动模拟对话框内的【关闭】按钮,将对话框关闭。保存该装配部件。
总结:
本章定义的缆绳铰是一个复合铰,在定义棱镜铰之后,将两个棱镜铰设置为一个缆绳铰。本章在装配图中将一个滑块复制为两个,在大型设备、复杂结构的设计中,经常遇到这样的情形。
有关CATIAV5r21运动分析教程的文章

将21.1节的曲柄零件和21.2节的固定轴架零件导入装配工作台内,如图21-8所示。定义第二个旋转铰单击CATIA界面上面的→→,进入工作台。图21-9 导入装配图中的椭圆尺零件单击工具栏内的图标,出现对话框。零件按铰接配合在一起。在对话框内选中,在图形区内的旋转铰位置显示旋转箭头。关闭对话框后出现一个消息框,提示现在设置的机构可以被模拟。图21-11 在固定轴架零件中选择凹槽的一个棱边图21-12 在滑块零件中选择一条对应的棱边......
2023-07-01

在本节设置滑动铰。设置滑块零件在固定架零件上滑动,将固定架零件设置为固定不动,最后模拟定义的滑动铰。进入模型运动模拟工作台单击CATIA界面的→→,进入工作台。光标放在罗盘的W轴上,移动鼠标将滑块零件向上移动,使滑块与支架离开一定距离。定义棱镜铰单击工具栏内的棱形接合图标,要单击这个图标,需要先单击旋转接合图标右下方的箭头,单击后出现所有铰定义图标,如图1-4所示。图1-12 对话框图1-13 对话框内拖动滑标改变距离范围......
2023-07-01

本节只是简单地设置平面铰,没有对平面铰进行模拟。实际设计工作中的平面铰,往往不是单独使用的,而是与其他运动机构相联。设置平面铰只是约束运动件仅在某个平面内做二维运动,而不能超出平面做三维空间运动。击CATIA界面上面的→→,进入工作台。单击工具栏内的平面接合图标,要单击这个图标,需要先单击图标右下方的箭头,出现所有铰定义图标。零件按平面铰接配合在一起,同时在左边的模型树中出现机构名称和铰的名称。......
2023-07-01

本节将两个零件设置为球铰。进入模型运动模拟工作台操作参见1.3。在球形零件中选择球的球心,在固定球架零件中选择半球的球心。单击对话框内的按钮,生成球铰。图7-4 铰对话框总结:本章是设计球铰,球铰允许接触的零件三个自由度的转动,但约束三个自由度的平动。因为球铰一般不单独使用,本章最后对设置的球铰没有进行运动模拟。......
2023-07-01

单击切换显示空间图标,显示电动机零件。选择基座的垂直轴,如图23-8所示。选择之前创建的位于基座顶部的参考平面。添加铰位置驱动函数双击模型树上的分析模型,激活运动工作台。单击铰位置驱动器图标,如果没有显示该图标,则单击一个体位置驱动器图标右下角的箭头,可以显示铰位置驱动器图标。在谐波对应的栏内输入90,20,0。单击铰位置驱动器对话框内的确定按钮,关闭对话框。图23-9 旋转铰对话框的设置......
2023-07-01

创建旋转混合曲面特征的具体步骤如下:1)单击按钮选择类型并输入名称为“4-7-2”,取消选项,单击。2)单击选项卡组中的→选项,系统将自动弹出对话框。注2:应注意坐标系在旋转混合特征中的作用。旋转混合是利用坐标系建立的,在建立截面2的时候弹出的是一个sec二维平面,原坐标系已不再和新的截面平面是正交关系,因此不能再作为参考,而需要设置新的坐标系来定义混合截面的位置。......
2023-06-19

图11.11.1 零件模型及模型树Step2.激活左盖模型。选取图11.11.3a所示的TOP基准平面,选择下拉菜单命令;定义实体化方向如图11.11.3a所示,并在操控板中单击“去除材料”按钮。Step7.创建图11.11.4所示的拉伸特征──拉伸1。图11.11.14 伸出项选择下拉菜单命令,系统弹出“伸出项:扫描”对话框。图11.11.17 截面草图Step14.创建图11.11.18所示的拉伸特征──拉伸3。选择下拉菜单命令;选取图11.11.26a所示的两条边线为圆角放置参照,输入圆角半径值0.5。......
2023-06-26
进入零件设计工作台操作参见1.1。单击工具栏内的图标,标注并调整圆的直径尺寸为10mm,圆心与V轴的距离为60mm,到H轴的距离为370mm,如图21-2所示。单击按钮,先看一下立体图效果,单击对话框内的按钮,生成曲柄零件的轴零件。图21-2 圆草图及其尺寸限制绘制矩形草图选中左边模型树中。矩形的长为500mm,高为100mm,垂直线到V轴的距离为250mm,矩形下面的边到H轴的距离为250mm,如图21-3所示。图21-4 矩形草图及其尺寸限制对实体开槽单击工具栏内的凹槽图标,出现对话框。......
2023-07-01
相关推荐