先设置两个棱镜铰,然后在两个棱镜铰之间生成缆绳铰。设置完成后模拟缆绳铰的运动。进入模型运动模拟工作台操作参见1.3。定义缆绳铰单击工具栏内的电缆接合图标后,出现对话框。在模型树上选择前面设计的两个铰,在对话框内将和选中,单击对话框内的按钮,生成缆绳铰。在图形区单击选择滑动架零件,出现一个消息框,提示现在设置的机构可以被模拟。在对话框内拖动滑标,改变距离范围。保存该装配部件。......
2023-07-01
在本节设置滑动铰。设置滑块零件在固定架零件上滑动,将固定架零件设置为固定不动,最后模拟定义的滑动铰。
单击CATIA界面的【开始】→【数宇化装配】→【DMU运动机构】,进入【模型运动模拟】工作台。
(2)移动滑块零件
将光标移动到罗盘的原点,按下鼠标左键移动罗盘,将罗盘放在滑块零件上。
光标放在罗盘的W轴上,移动鼠标将滑块零件向上移动,使滑块与支架离开一定距离。
(3)定义棱镜铰
单击【DMU运动机构】工具栏内的棱形接合图标 ,要单击这个图标,需要先单击旋转接合图标
,要单击这个图标,需要先单击旋转接合图标 右下方的箭头,单击后出现所有铰定义图标,如图1-4所示。单击棱形接合图标
右下方的箭头,单击后出现所有铰定义图标,如图1-4所示。单击棱形接合图标 后,出现【创建接合:棱形】对话框,如图1-5所示。单击对话框内的【新机械装置】按钮,出现【创建机械装置】对话框,如图1-6所示。按照对话框内的默认机构名称【机械装置.1】,单击对话框内的确定按钮,生成新的运动机构,同时【创建机械装置】对话框关闭,回到【创建接合:棱形】对话框。
后,出现【创建接合:棱形】对话框,如图1-5所示。单击对话框内的【新机械装置】按钮,出现【创建机械装置】对话框,如图1-6所示。按照对话框内的默认机构名称【机械装置.1】,单击对话框内的确定按钮,生成新的运动机构,同时【创建机械装置】对话框关闭,回到【创建接合:棱形】对话框。

图1-4 所有铰定义图标
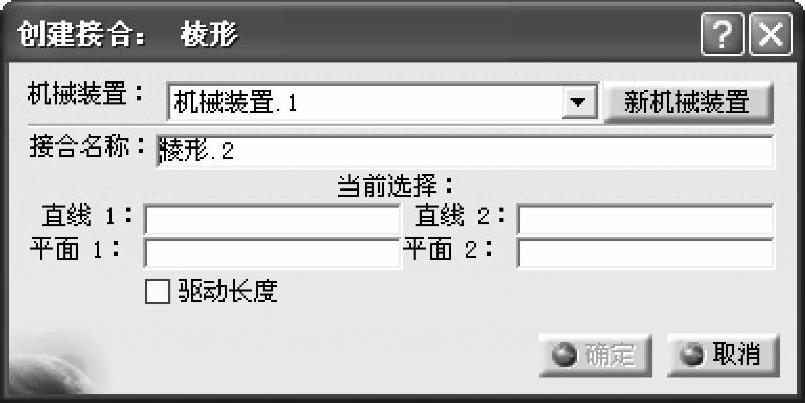
图1-5 【创建接合:棱形】对话框
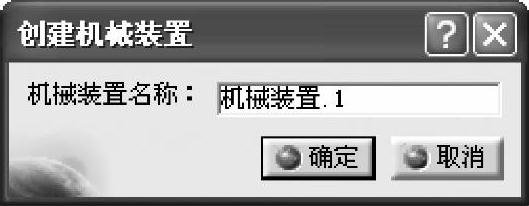
图1-6 【创建机械装置】对话框
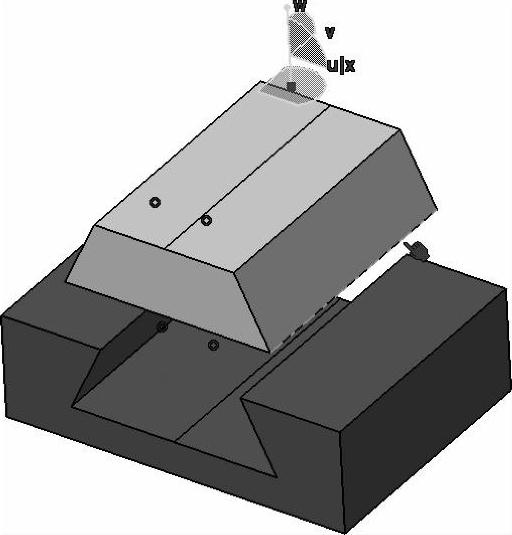
图1-7 选择滑块零件下表面的一个棱边
在滑块零件中选择下表面的一个棱边,如图1-7所示。在支架零件中选择一条对应的棱边,如图1-8所示。在滑块零件中选择下表面,如图1-9所示。在支架零件中选择对应表面,如图1-10所示。在【创建接合:棱形】对话框内选中【驱动长度】。单击对话框内的【确定】按钮,生成棱镜铰,零件按铰接配合在一起,同时在左边的模型树中出现机构名称和铰的名称。
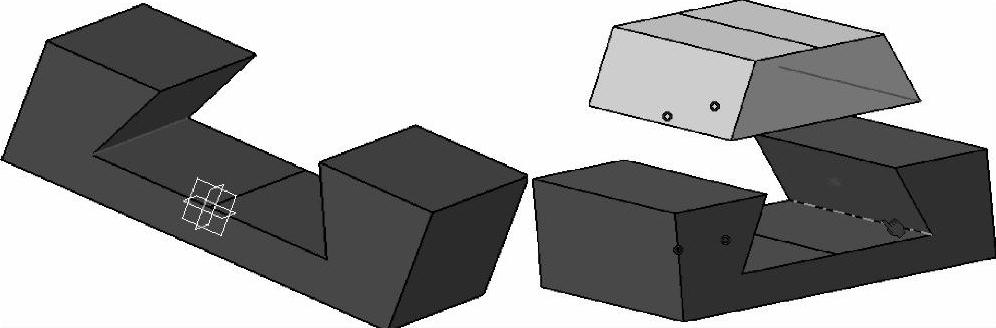
图1-8 选择支架零件中对应的一条棱边
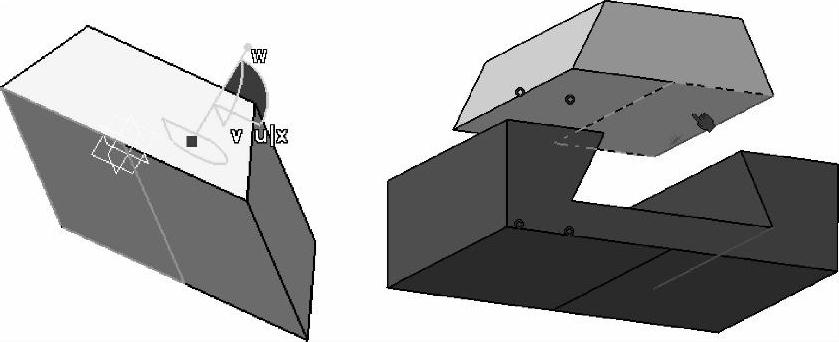
图1-9 选择滑块零件中的下表面

图1-10 选择支架零件中对应表面
(4)定义固定零件
单击【DMU运动机构】工具栏内的固定零件图标 ,单击后出现【新固定零件】对话框,如图1-11所示。在图形区单击选择支架零件。选择后出现一个消息框,提示现在设置的机构可以被模拟。单击消息框内的【确定】按钮,关闭消息框。
,单击后出现【新固定零件】对话框,如图1-11所示。在图形区单击选择支架零件。选择后出现一个消息框,提示现在设置的机构可以被模拟。单击消息框内的【确定】按钮,关闭消息框。
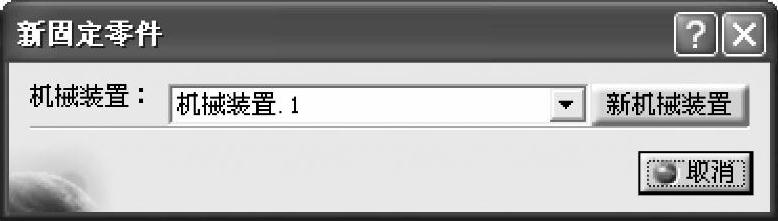
图1-11 【新固定零件】对话框
(5)模拟铰的运动
单击【DMU运动机构】工具栏内的使用命令进行模拟图标 ,出现【运动模拟-机械装置.1】对话框,如图1-12所示。在对话框内拖动滑标,如图1-13所示,改变距离范围。单击对话框内的【向前】按钮,滑块在支架上开始运动。
,出现【运动模拟-机械装置.1】对话框,如图1-12所示。在对话框内拖动滑标,如图1-13所示,改变距离范围。单击对话框内的【向前】按钮,滑块在支架上开始运动。
单击运动模拟对话框内的【重置】按钮,使滑块复位到原点。单击运动模拟对话框内的【关闭】按钮将对话框关闭。
单击【标准】工具栏中的保存文件图标 ,将该装配部件保存。
,将该装配部件保存。
总结:
本章学习的是最简单的铰——滑动铰,一个零件在一个固定件上做直线运动。除滑动铰的设置是大家第一次接触相对比较难,需要一个熟悉过程外,本章第二节讲述的在装配图中进行零件的设计,也有新内容,但这种设计方法是非常实用的,请读者自己体会。
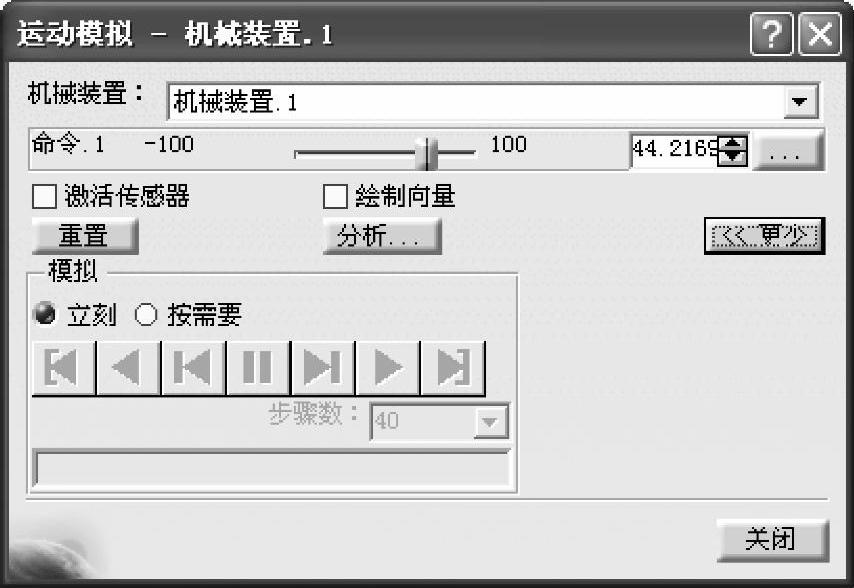
图1-12 【运动模拟】对话框

图1-13 对话框内拖动滑标改变距离范围
有关CATIAV5r21运动分析教程的文章

先设置两个棱镜铰,然后在两个棱镜铰之间生成缆绳铰。设置完成后模拟缆绳铰的运动。进入模型运动模拟工作台操作参见1.3。定义缆绳铰单击工具栏内的电缆接合图标后,出现对话框。在模型树上选择前面设计的两个铰,在对话框内将和选中,单击对话框内的按钮,生成缆绳铰。在图形区单击选择滑动架零件,出现一个消息框,提示现在设置的机构可以被模拟。在对话框内拖动滑标,改变距离范围。保存该装配部件。......
2023-07-01

机械及其部件都是由零件所组成的,装配精度与相关零、部件制造误差的累积有关。显然,装配精度取决于零件,特别是关键零件的加工精度。图1-23 设置“主单位”选项卡7.其余选项卡保留默认设置不变,单击“新建标注样式”对话框中的“确定”按钮,完成“机械标注样式”的设置。图1-24 创建机械标注样式......
2023-06-24

将21.1节的曲柄零件和21.2节的固定轴架零件导入装配工作台内,如图21-8所示。定义第二个旋转铰单击CATIA界面上面的→→,进入工作台。图21-9 导入装配图中的椭圆尺零件单击工具栏内的图标,出现对话框。零件按铰接配合在一起。在对话框内选中,在图形区内的旋转铰位置显示旋转箭头。关闭对话框后出现一个消息框,提示现在设置的机构可以被模拟。图21-11 在固定轴架零件中选择凹槽的一个棱边图21-12 在滑块零件中选择一条对应的棱边......
2023-07-01

图纸在图板上粘贴的位置应尽量靠近左边,图纸下边至图板边缘的距离应略大于丁字尺的宽度。这样不仅加快绘图速度和提高精度,而且可减少丁字尺与三角板在图纸上的摩擦,保持图面清洁。如有错误,应待墨汁干后,在图纸下垫以丁字尺或三角板将刀片垂直图纸轻轻朝一个方向刮去墨迹。......
2023-06-22
2)打开CFX前处理CFX-Pre14.5,如图4-3-1所示。图4.3-10 流动模型图4.3-11 流动双模型图4.3-12 叶轮域中固体信息图4.3-13 叶轮域中液体信息图4.3-14 边界命名图4.3-15 基本设置4)边界信息中,“Massand Momentum”选择:Normal Speed,而指定Normal Speed为3.743[ms^-1],该速度是由流量和叶轮进口直径得到,如图4.3-16所示。图4.3-16 进口速度图4.3-17 固体和液体的体积分数5.设定出口边界条件1)在任务栏中单击。图4.3-18 边界命名图4.3-19 基本设定图4.3-20 出口边界设置6.交界面设置1)在任务栏中单击。......
2023-06-26

电流密度J的分布情况通过求解公式(6-1)来获得。在本节中,动静导电杆的材料采用铜,动静触头的材料采用银,电弧的电导率为银的10-4。在ANSYS有限元软件中进行静态传导电流分析,需要经过单元类型选择、定义材质属性、分配材质属性、几何模型剖分、定义边界条件、加载激励和结果处理这几个步骤。将上一步所得电流密度分布情况作为激励加载至模型上,通过有限元分析计算,可以得到灭弧室内的空间磁场分布。......
2023-06-15

第一个注意到草莓的生长和繁殖方式的人创造出了压条繁殖。草莓母体上会延伸出一些沿着地面匍匐而行的细长的枝,被称为匍匐茎。匍匐茎长到一定长度后,它的尖端会在土里扎根,并很快长成一个独立的小植株。图11.草莓匍匐茎这株新草莓足够强壮后,也会伸出长长的枝,重复同样的过程——在地上匍匐延伸,前端长出一簇叶片,然后生根长成新植株。最初它们会通过匍匐茎和母株相连,与母株共同生存,年长的植株为年轻的植株提供营养。......
2023-10-21

本节设计一个滑动架,该零件在后面的定义缆绳铰中是固定不动的零件。单击工具栏内的约束图标,标注并调整矩形的形状尺寸,矩形的长为200mm,高为200mm,水平线到H轴的距离为100mm,垂直线到V轴的距离为100mm。生成第二个矩形草图在图形区选中滑动架零件的侧面。单击工具栏内的镜像图标,然后在图形中选中H轴,形成线段关于H轴的对称线,如图6-1所示。......
2023-07-01
相关推荐