伺服控制系统是一种能够跟随输入指令信号进行控制的系统,也称随动控制系统。位置伺服控制系统用于机械的定位和定向控制,机器人、数控机床、雷达跟踪、舰船操舵等都大量使用电动机控制的位置伺服系统。位置闭环控制与调速系统的不同是其有位置检测和位置控制器。本章主要介绍步进电动机位置开环控制原理和伺服电动机位置闭环控制系统的组成和控制要求。......
2023-06-19
简易升降机的控制系统主要有继电接触器控制系统、PLC控制系统、计算机控制系统和变频控制系统等,如图2-48所示。
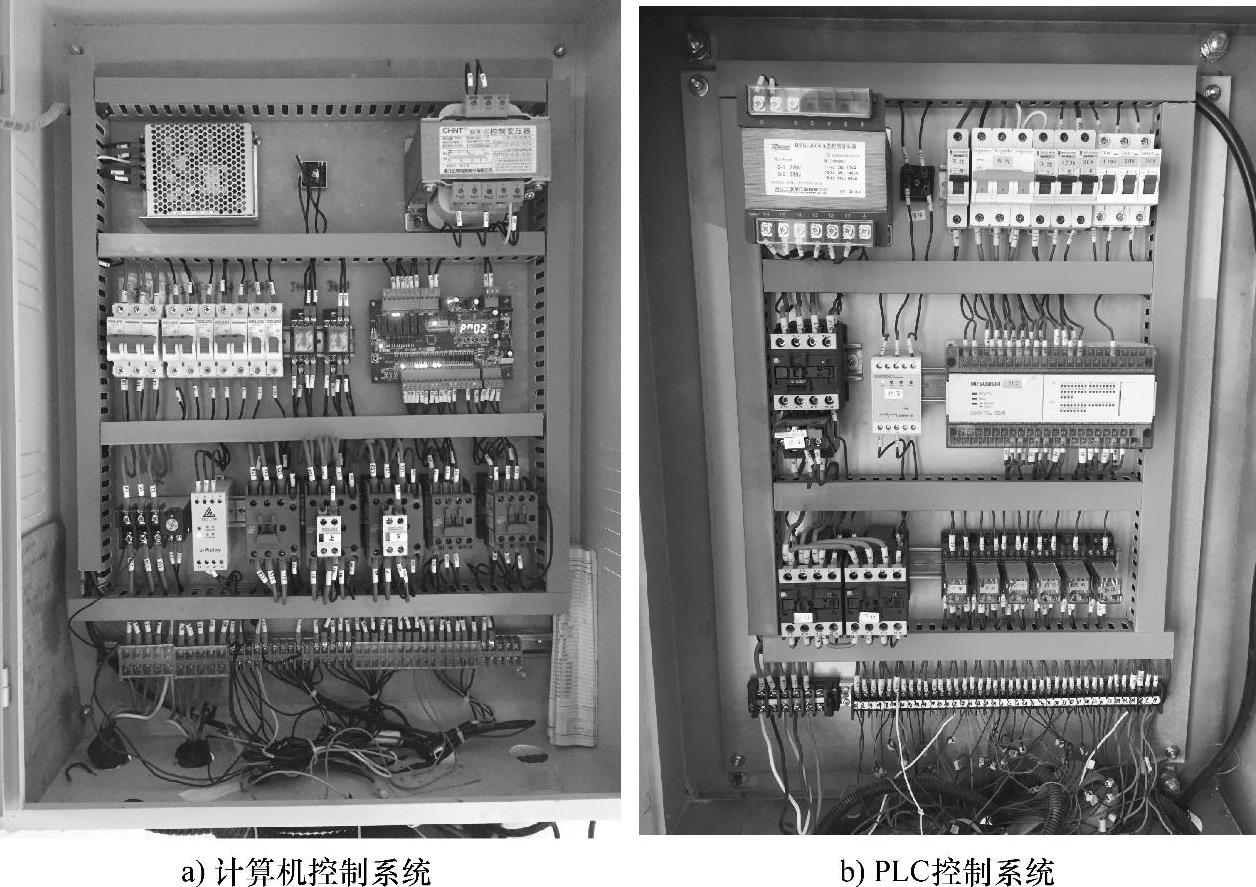
图2-48 控制系统
(一)继电接触器控制系统
继电接触器控制系统原理简单、线路直观、易于掌握。继电器通过触点的断、合进行逻辑判断和运算,进而控制简易升降机的运行。由于触点易受电弧损害,寿命短,因而继电接触器控制的简易升降机故障率较高、动作速度慢、控制功能少、接线复杂、通用性与灵活性较差。对不同的楼层和不同的控制方式,其原理图、接线图等必须重新设计和绘制,而且控制系统由许多继电器和大量的触点组成,故障率高。因此,继电接触器控制系统已逐渐被可靠性高、通用性强的PLC及计算机控制系统所代替。

图2-48 控制系统(续)
(二)PLC控制系统
PLC是以微处理器为核心的工业控制器,如图2-49所示。它的基本结构由CPU、输入输出模块、存储器及编程器等组成。与计算机控制系统相比,它具有以下主要特点:
(1)编程方便,易懂好学PLC虽然采用了计算机技术,但许多基本指令类似于逻辑代数的与、或、非运算,即电气控制的触点串联、并联等。程序编写采用梯形图,梯形图与继电接触器控制原理图类似,因而编程语言形象直观。

图2-49 PLC控制器
(2)抗干扰能力强,可靠性高 PLC由于采用现代大规模集成电路技术,开关动作由无触点的半导体电路完成,加上采用严格的生产工艺制作,其内部结构采取了许多抗干扰措施,即输入、输出模块均有光电耦合电路,可在较恶劣的环境下工作。使用PLC构成控制系统,与同等规模的继电接触器系统相比,电气接线及开关接点已减少很多,故障也就大大降低。此外,PLC带有硬件故障自我检测功能,出现故障时可及时发出报警信息。在应用软件中,应用者还可以编入外围器件的故障自诊断程序,使系统中除PLC以外的电路及设备也获得故障自诊断保护。这样,整个系统具有极高的可靠性。
(3)构成系统灵活简便 PLC的CPU、输入输出模块和存储器组合为一体,根据控制要求可选择相应电路形成的输入、输出模块。用于简易升降机控制时,可将PLC作为内部由各种继电器及其触点、定时器、计数器等电路构成的控制装置。PLC的输入可直接与交流110V、直流24V等信号相连接,输出可直接驱动交流220V、直流24V的负载,无须再进行电平转换与光电隔离,因而可以方便地构成各种控制系统。
(4)功能强,扩展性好 现代PLC具有数字和模拟量输入输出、逻辑和算术运算,以及定时、计数、顺序控制、功率驱动、通信、人机对话、自检、记录和显示功能,使用水平大大提高。同时具有各种扩充单位,可以方便地适应不同工业控制需要的不同输入、输出点及不同输入、输出方式的系统。
(5)安装维护方便 PLC本身具有自诊断和故障报警功能。当输入、输出模块故障时,可方便地更换单个输入模块。
(三)计算机控制系统
随着电子技术的发展,计算机控制系统已成为各大产品的主流,现在的简易升降机均以计算机控制系统为主,如图2-50所示。计算机控制系统由CPU、存储器、输入及输出接口等主要部分组成。CPU主要完成各层站召唤信号处理、逻辑和算术运行,安全检查和故障判断,发出控制指令和速度指令等。存储器用于存储各层站数据、运行控制程序等。输入、输出接口电路用于CPU与外部设备或电路的信号传送、电平转换,并通过光电耦合隔离外界干扰。
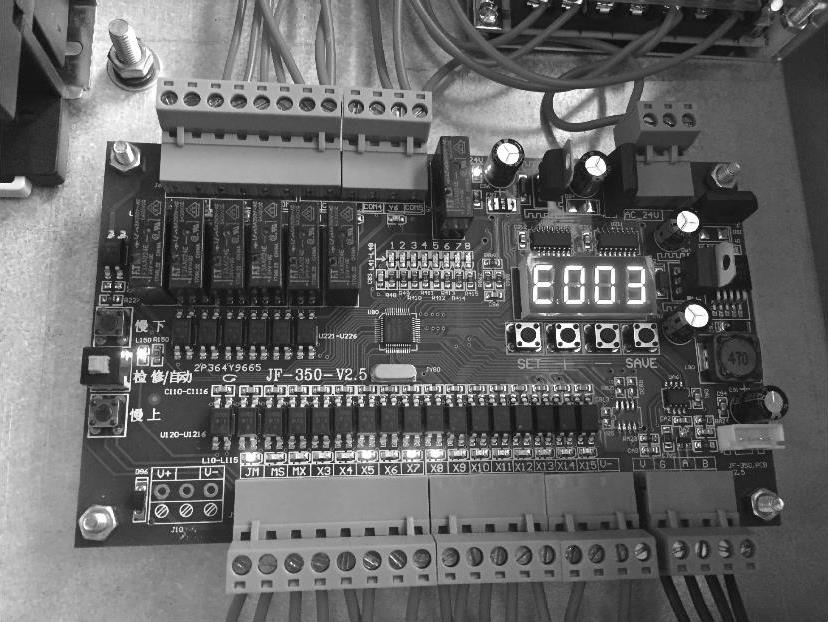
图2-50 计算机控制系统
计算机控制用于简易升降机主要有以下几个特点:
(1)兼容性强 能适用不同驱动方式、不同层站、不同功能的简易升降机的控制系统。
(2)产品成熟稳定 经过多年的使用和改良,已经形成一套成熟、稳定的系统,无参数漂移现象,且具有很高的柔性,在不需要改动硬件的情况下,可以通过软件改变系统的功能。
(3)抗干扰能力强,可靠性高 计算机控制由于采用微电子技术,其内部结构采取了许多抗干扰措施,如输入、输出模块均有光电耦合电路,能适应一般工况的工业生产厂区。使用计算机控制系统,与同等规模的继电接触器系统相比,故障大大降低。计算机控制带有硬件故障自我检测功能,出现故障时不仅可及时发出故障信息(故障代码),还可以通过故障信息及时排除故障。
(4)安装维护方便 对不同参数的设备,只需更改计算机内相关程序参数即可实现设备运行调试。同时计算机本身具有自诊断和故障报警功能。当输入、输出模块故障时,可方便地更换单个输入模块。
(5)生产成本低廉 随着微电子技术的发展,各元器件价格低廉,一个完整的控制系统的生产成本也随之下降。
有关简易升降机安全操作与管理的文章

伺服控制系统是一种能够跟随输入指令信号进行控制的系统,也称随动控制系统。位置伺服控制系统用于机械的定位和定向控制,机器人、数控机床、雷达跟踪、舰船操舵等都大量使用电动机控制的位置伺服系统。位置闭环控制与调速系统的不同是其有位置检测和位置控制器。本章主要介绍步进电动机位置开环控制原理和伺服电动机位置闭环控制系统的组成和控制要求。......
2023-06-19

宽带通优化设计SSDC的控制系统由换流母线三相瞬时电压测量环节、次同步频率变换环节、带通滤波器、优化设计相位补偿及比例放大环节组成,该SSDC的输入信号为呼辽HVDC整流站换流母线的交流三相电压。图7-20 宽带通优化设计SSDC控制系统结构在理论和实现方法上,上述SSDC的两种设计都是可以实现的,并且能为待研发电机组提供较好的电气正阻尼,但是宽带通优化设计SSDC具有更强的通用性和工程实用价值。......
2023-06-22

在PLC控制系统中,所有按钮和触点输入及接触器线圈均接到PLC 上,从接线方面来看要简单得多,其控制功能由PLC 内部程序决定,通过更换程序可以更改相应的控制功能。这时的PLC 多少有点继电器控制装置替代物的含义,其主要功能只是执行原先由继电器完成的顺序控制、定时等。因此,早期的PLC的性能要优于继电器控制装置,其优点包括简单易懂、便于安装、体积小、能耗低、有故障指示、能重复使用等。......
2023-06-27

简易升降机的控制系统主要是对各种指令信号、位置信号、速度信号和安全信号进行管理,对拖动装置和开门机构发出方向、起动、加速、减速、停车和开关门的信号,使简易升降机正常运行或处于保护状态。控制系统的功能与性能决定着简易升降机的自动化程度和运行性能。微电子技术和电力电子学的迅速发展及广泛应用,提高了简易升降机控制的技术水平和可靠性。......
2023-07-01

图4.20 磁链开环转差型矢量控制系统1.采用晶闸管电流型逆变器的磁链开环转差型矢量控制系统磁链开环转差型矢量控制系统也称间接型矢量控制系统,如图4.20所示。系统采取磁链开环控制,以磁链给定Ψr直接计算定子电流的励磁分量ism。采用晶闸管电流型变流器的磁链开环转差型矢量控制系统,适用于中大功率调速系统,但是因为电抗器体积大,输出电流是三相矩形波,谐波大,所以现在使用很少。图4.22 磁链开环转差控制型PWM调制矢量控制系统......
2023-06-19
下面以反馈控制理论为基础研究转速调节器的设计。有静差调速系统转速调节器的放大倍数 关于0型系统比例调节器放大倍数KP的设计在有静差调速系统分析时已经介绍,它可以根据满足调速指标时对转速闭环系统的转速降要求来确定。......
2023-06-19

与普通TIG焊相比,由于热丝TIG焊显著提高了热输入,适于焊接中等厚度的焊接结构,又保持了TIG焊具有高质量焊缝的特点。热丝TIG焊的熔敷速度可比普通TIG焊提高两倍,从而使焊接速度增加3~5倍,提高生产率。图7-50 钢的钨极氩弧焊熔敷速度比较3.TOPTIG焊TOPTIG焊原理 TOPTIG是TIG焊接工艺的一种。......
2023-07-02
相关推荐