【摘要】:PWM控制是逆变弧焊电源中常用的控制方法。后者产生的PWM脉冲波形可以加死区控制。图7-15 带有死区的PWM波形图7-15所示是具有“死区”控制的PWM波形。
PWM控制是逆变弧焊电源中常用的控制方法。采用DSP控制可以不用专门PWM控制的集成电路芯片,而是通过软件程序,由DSP直接输出PWM脉冲列。
在TMS320LF2407A型DSP中,使用定时器、周期寄存器和比较器及相应的软件程序可以产生PWM脉冲波形。使用DSP有两种产生PWM脉冲波形的方法:一种是使用定时器和比较寄存器;另一种是使用比较单元。后者产生的PWM脉冲波形可以加死区控制。
1.利用定时器和比较寄存器产生PWM信号
TMS320LF2407A型DSP有两个结构相同的独立事件管理器EVA和EVB。每个事件管理器包含通用定时器(GP)、比较单元、捕捉单元和正交编码脉冲(QEP)电路。两个事件管理器模块功能和结构基本相同。
事件管理器中的GP定时器是基于外部或内部时钟定时的,而且可编程。GP定时器可以设置为上升或下降模式的计数方向,可以独立地用作时间基准。例如,可以为一个控制系统产生采样周期,为比较单元和相关的PWM电路提供时间基准等。
GP定时器有比较寄存器和周期寄存器,比较寄存器中可以存储与GP定时计数器计数比较的数值;周期寄存器存储的值决定了定时器的定时周期,当周期寄存器存储的数值与定时器预定的数值匹配时,GP定时器复位为“0”或开始下溢计数(取决于定时器所处的工作模式)。
利用DSP(TMS320LF2407A)的GP定时器、定时器的周期寄存器TxPR和比较寄存器TxCMPR,可以在PWM输出引脚TxPWM上得到一个“对称”的或“非对称”的PWM脉冲波形。由于逆变弧焊电源控制中常采用非对称的PWM波形,因此本节主要介绍非对称的PWM波形产生原理。
将GP定时器设置在连续加计数方式时,可以产生图7-14所示的非对称PWM波形。
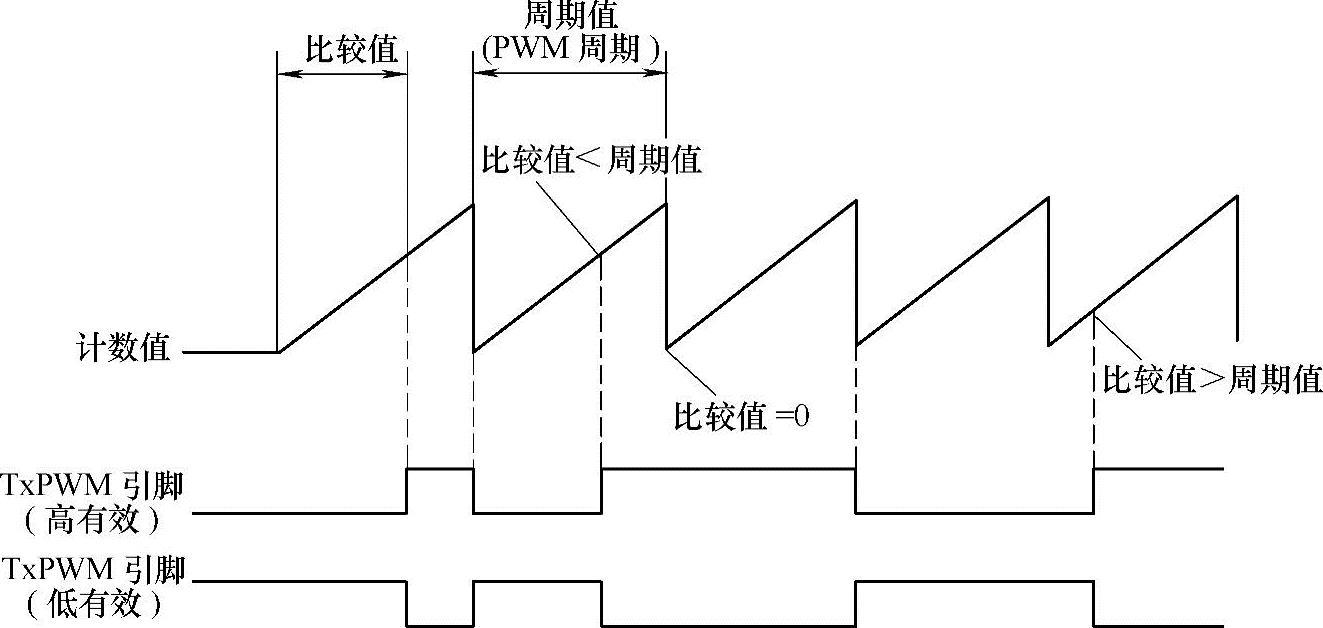
图7-14 定时器比较寄存器产生的非对称PWM波形
将确定的脉冲周期值寄存在定时器周期寄存器TxPR中,将比较值存放在定时器比较寄存器TxCMPR中。周期值用于产生PWM脉冲波形的周期(频率),比较值用于产生PWM脉冲的脉宽值(决定脉冲的占空比)。将GP的计数初值设置为0,当设定的比较值小于周期值(见图7-14左半部波形)时,TxPWM(高电平有效)引脚输出低电平,GP从0开始计数,当其计数值等于比较值时,在TxPWM(高电平有效)引脚上就会出现正跳变输出高电平,产生脉冲;GP计数器继续计数,当计数值等于周期值时,在TxPWM(高电平有效)引脚上出现负跳变变为低电平,脉冲消失,同时GP复位为0,完成一个脉冲周期。循环往复,在TxPWM(高电平有效)引脚上产生所需要的PWM脉冲波形。
改变比较值只能影响PWM脉冲的单边波形,这是非对称PWM波形的特点。
由图7-14可见,在非对称PWM波形中,PWM脉冲波形的周期就是周期寄存器的周期值。因此,这种高有效PWM波形的占空比α计算公式为

如果设置的比较值等于0,则在整个PWM脉冲周期中,引脚TxPWM(高电平有效)输出总是1。只要比较值不变,这种情况就会持续下去,它的占空比α等于1。
如果比较值等于周期值,引脚上只会出现1个计数周期的高电平,PWM脉冲周期的其他时间都是低电平,其占空比α近似为0。
如果比较值大于周期值,会出现图7-14右段波形。
对于低有效的PWM脉冲波形,其占空比α为

2.利用比较单元产生PWM信号
TMS320LF2407A型DSP的每个事件管理器中有3个比较单元(EVA:1,2,3;EVB:4,5,6),1个比较控制寄存器COMCONx和1个比较方式控制寄存器ACTRx。每个比较单元都有1个比较寄存器CMPRx(注意区别于定时器比较寄存器TxCMPR),以及2个PWM输出引脚。
“死区”是用来防止类似全桥式逆变弧焊电源中同一桥臂的上、下两个开关管直通。TMS320LF2407A型DSP的事件管理器EVA和EVB具有各自独立的可编程“死区”单元DBTCONA和DBTCONB,它可以在利用比较单元产生的PWM脉冲中加入死区控制功能。
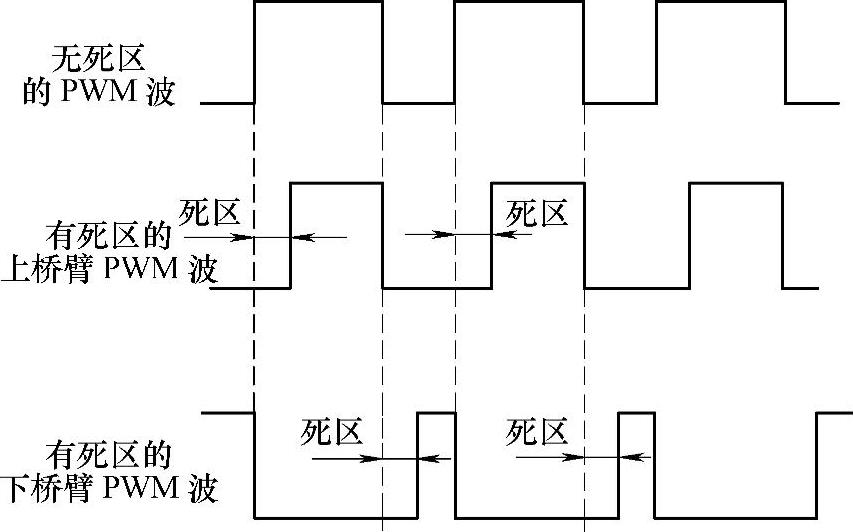
图7-15 带有死区的PWM波形
图7-15所示是具有“死区”控制的PWM波形。由图7-15可见,“死区”都加在功率半导体开关管“开”时刻之前,而“关”时刻不加死区。(https://www.chuimin.cn)
利用比较单元产生PWM脉冲波形与利用定时器比较寄存器产生PWM脉冲波形的方法几乎相同,只不过前者使用比较单元和“死区”控制单元,而后者使用定时器和比较寄存器但没有“死区”功能。利用比较单元可以产生如图7-16所示的非对称PWM波形。
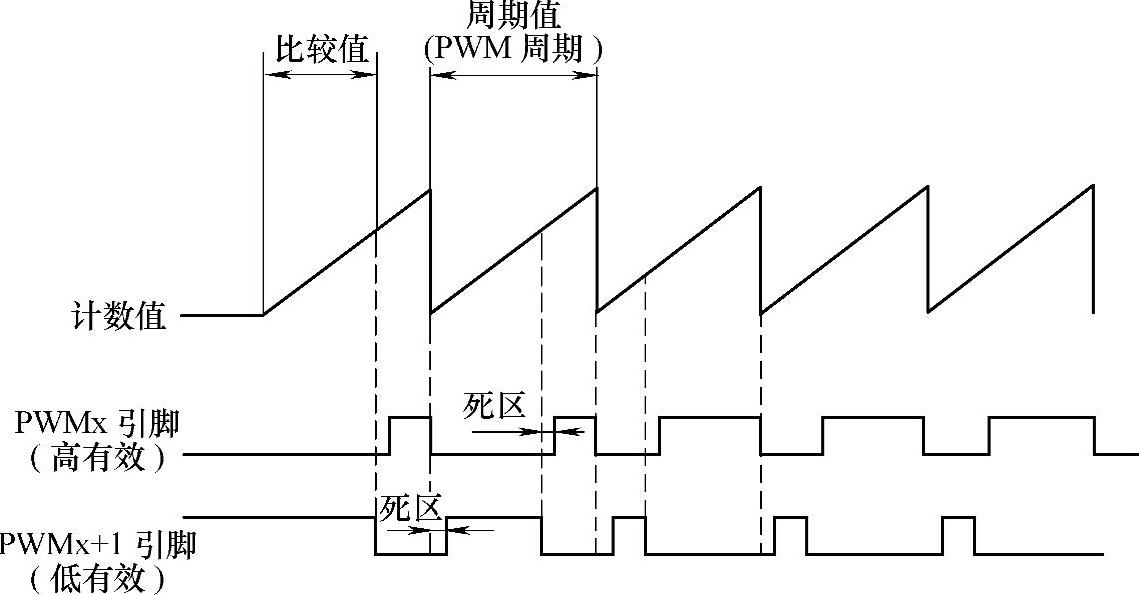
图7-16 采用比较单元产生的非对称PWM波形
由于加入了死区,PWM波形高电平脉冲的宽度减少了一个死区时间,而周期没有变化,因此,高有效的PWM波形的占空比α应为

低电平有效的PWM波形的占空比α为

改变周期值可以改变PWM波的频率;改变比较值可以改变PWM脉冲波形的占空比。
3.相位相差180°的双路PWM脉冲信号的产生
以全桥逆变电路为例,逆变器需要相位相差180°的双路PWM脉冲信号来控制逆变器中功率半导体电子开关的通断。可以采用定时器和比较寄存器产生PWM脉冲信号的方法来获得所需要的双路PWM脉冲信号。
以TMS320LF2407A型DSP中的事件管理器EVB为例,利用EVB中序号为3的GP通用定时器,记为定时器3,序号为4、5的比较寄存器,记为比较寄存器4、比较寄存器5,来产生PWM脉冲波形。其中需要应用定时器3的计数器T3CNT、控制寄存器T3CON、周期寄存器T3PR,比较寄存器CMPR4和比较寄存器CMPR5,比较控制寄存器COMCONB、比较方式控制寄存器ACTRB等。图7-17所示为初始化程序流程图,图7-18所示为产生PWM脉冲波形的程序流程图。
周期寄存器T3PR的设定值是根据逆变电源电子开关频率要求所确定的PWM脉冲周期值(该值一般是确定不变的);比较寄存器CMPR4、CMPR5的设定值是根据逆变电源电子开关每一个通断周期中的开通时间来确定的(在实际控制中,开通时间是根据需要而变化的)。
PWM脉冲产生过程:定时器3中的计数器T3CNT从0开始增计数,在没有达到比较寄存器CMPR4中存储的数值之前,输出PWM7为“无效”的低电平,相当于脉冲休止时间;当计数器T3CNT计数的值与比较寄存器CMPR4中存储的数值相等时,产生比较匹配事件,输出PWM7引脚电压发生跃变,变为“有效”的高电平(从此时刻开始到下一次匹配事件发生之前,可以改变比较寄存器CMPR4中设定的值),相当于进入脉冲峰值时间;计数器继续增计数,当达到周期寄存器T3PR存储的数值时,产生周期匹配事件,输出PWM7引脚电压再次发生跃变,输出为“无效”的低电平,相当于进入脉冲休止时间;同时,计数器T3CNT复位清零,并且从0开始重新计数,进入下一周期的循环。产生的PWM波形如图7-19所示。
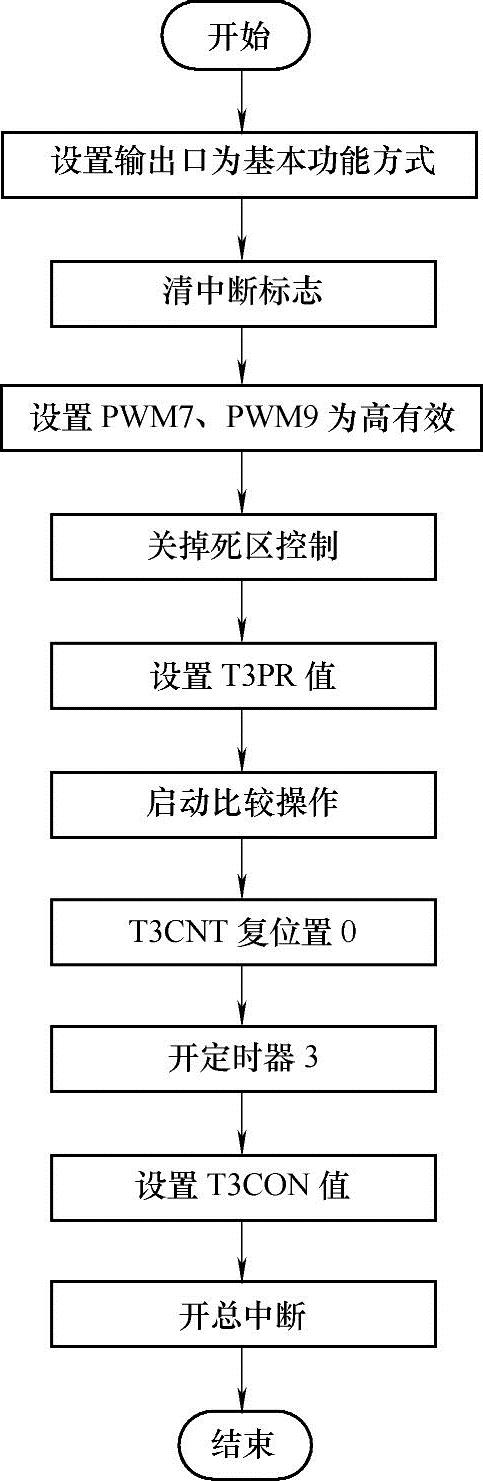
图7-17 PWM初始化程序流程图
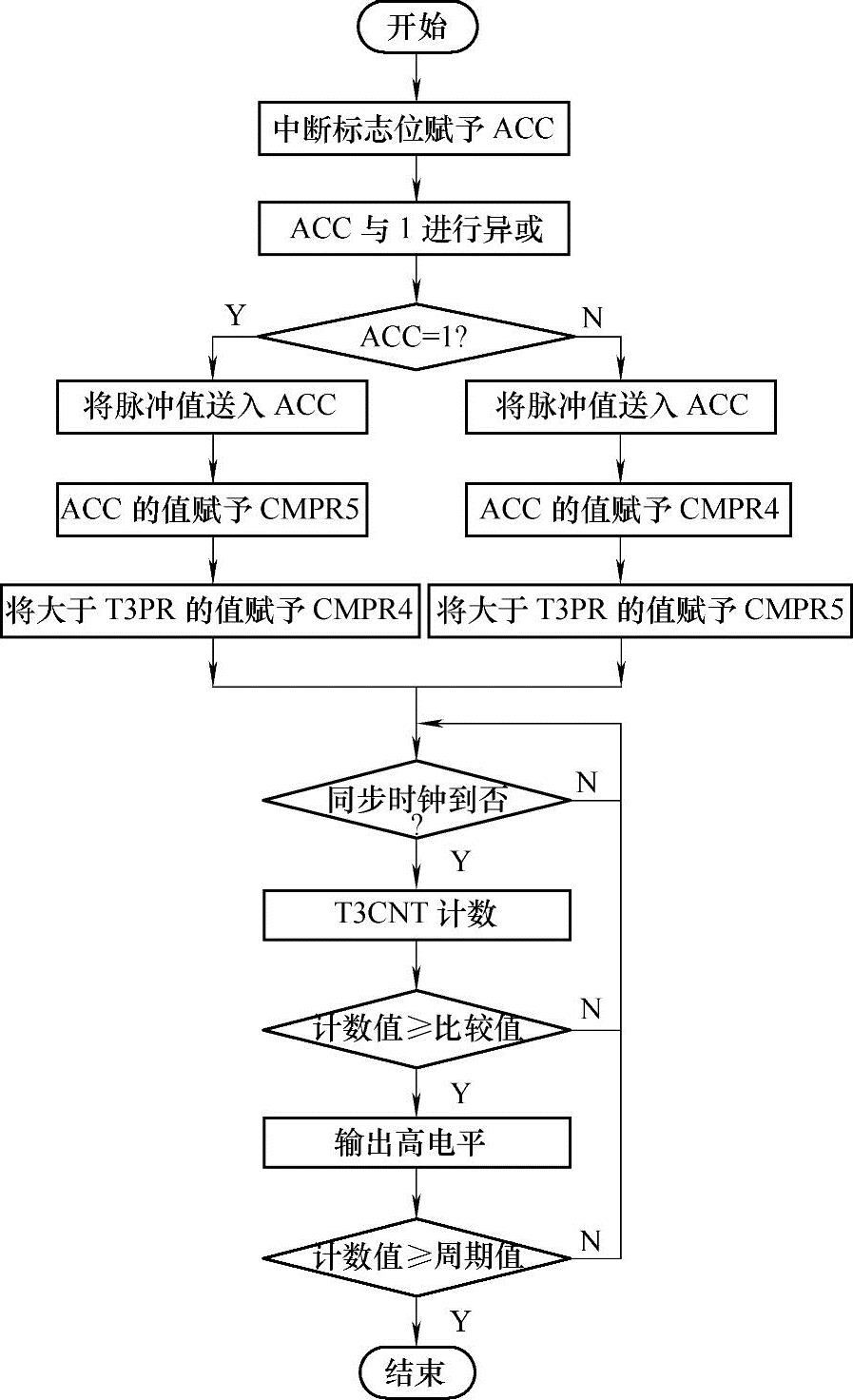
图7-18 数字PWM流程图
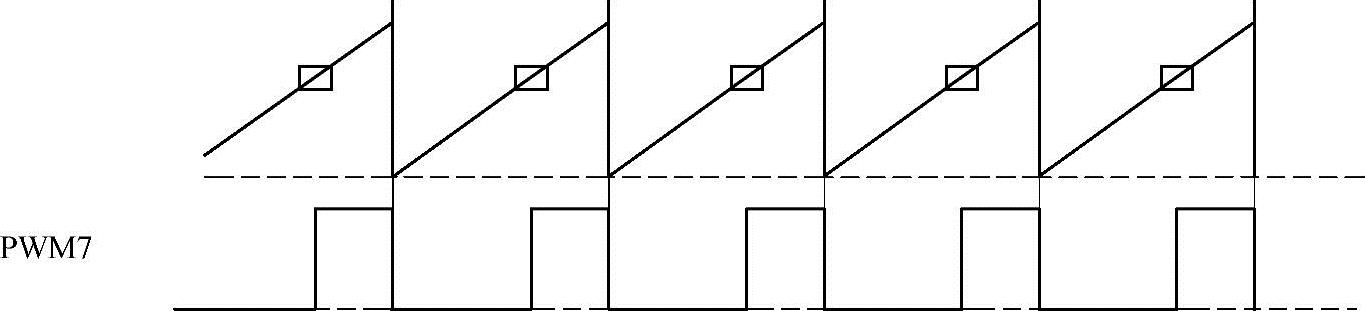
图7-19 PWM脉冲波形产生过程示意图
如果设定比较寄存器CMPR4的数值大于周期寄存器T3PR的数值,那么在整个周期中,PWM7的输出均为“无效”的低电平。就是利用此性质,产生相位差180°的双路PWM脉冲信号。
产生相位相差180°的双路PWM脉冲信号,需要利用定时器3中的计数器T3CNT计数,利用其周期寄存器T3PR控制脉冲周期。同时,采用比较寄存器CMPR4、CMPR5分别控制双路PWM脉冲的产生及占空比。
周期寄存器T3PR的设定值为弧焊电源逆变器实际要求开关周期值的1/2,在第一个周期内,设定比较寄存器CMPR4(对应控制PWM7的输出)一个适当的值(根据所需占空比计算得到的值),而比较寄存器CMPR5(对应控制PWM9的输出)设定的值要大于周期寄存器T3PR的值,因此,在第一个周期内,只有PWM7输出脉冲,而PWM9的输出始终为低电平,无脉冲输出。在第二个周期内,设定CMPR5一个适当的值,而CMPR4设定的值要大于T3PR的值,因此,在第二个周期内只有PWM9输出脉冲,而PWM7的输出始终为低电平,无脉冲输出。循环往复,可以得到图7-20所示的相位相差180°的双路PWM脉冲信号,满足了常用逆变弧焊电源双路PWM脉冲控制的要求。
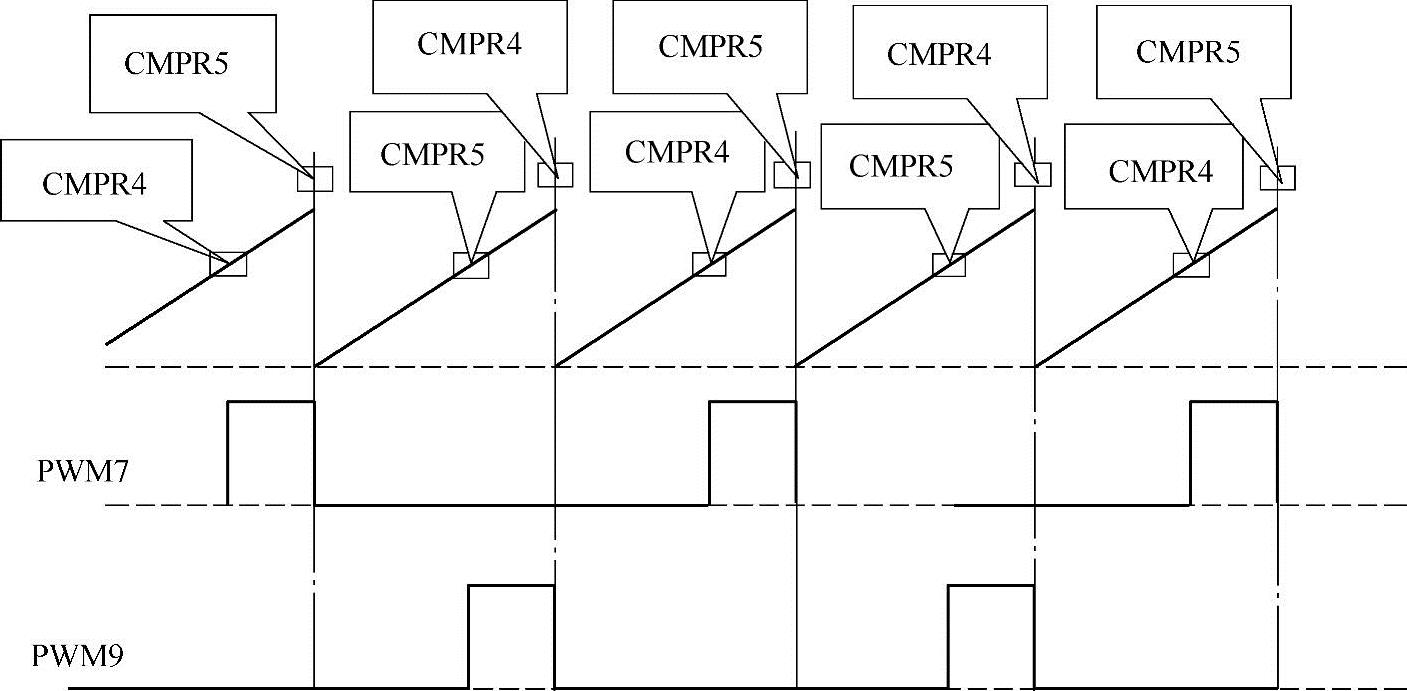
图7-20 相位相差180°的双路PWM脉冲信号




相关推荐