图4-4H型可逆PWM变换器1)双极式可逆PWM变换器双极式工作制的主要特点是,四个功率管IGBT的栅极驱动电压分为两组。......
2023-06-25
PWM控制是目前晶体管式逆变弧焊电源、场效应晶体管式逆变弧焊电源、IGBT式逆变弧焊电源中应用最多的控制方式,PWM控制器是逆变式弧焊电源控制电路的核心。早年采用分立电子元件构成PWM控制器;目前应用较多的是采用各种专用的PWM控制集成芯片,如TL494、LM3524、SG3525、UCX3846等。采用集成芯片的PWM控制器,不仅简化了设计计算,而且大幅度地减少了元器件数量和连接焊点,使电路的可靠性大大提高。
目前PWM控制集成芯片型号很多,在逆变式弧焊电源中应用较多的是电压型的SGX525/X527系列和电流型的UCX846/X847系列。一般地,每一种芯片都分为三个档次,即型号中的X分别代表1、2、3。其中1代表第一种类型,适用的环境温度为-55~125℃,例如SG1525;2代表第二种类型,适用的环境温度为-40~85℃,例如,SG2525;3代表第三种类型,适用的环境温度为0~70℃,例如,SG3525。
1.SGX524系列集成PWM控制器
SGX524系列(包括SG1524、SG2524、SG3524等)PWM控制器是属于频率固定的单片集成脉宽调制型控制器的类型。SGX524的封装为DIP-16型,即双列直插16引脚,其内部结构如图6-17所示(以3524为例)。
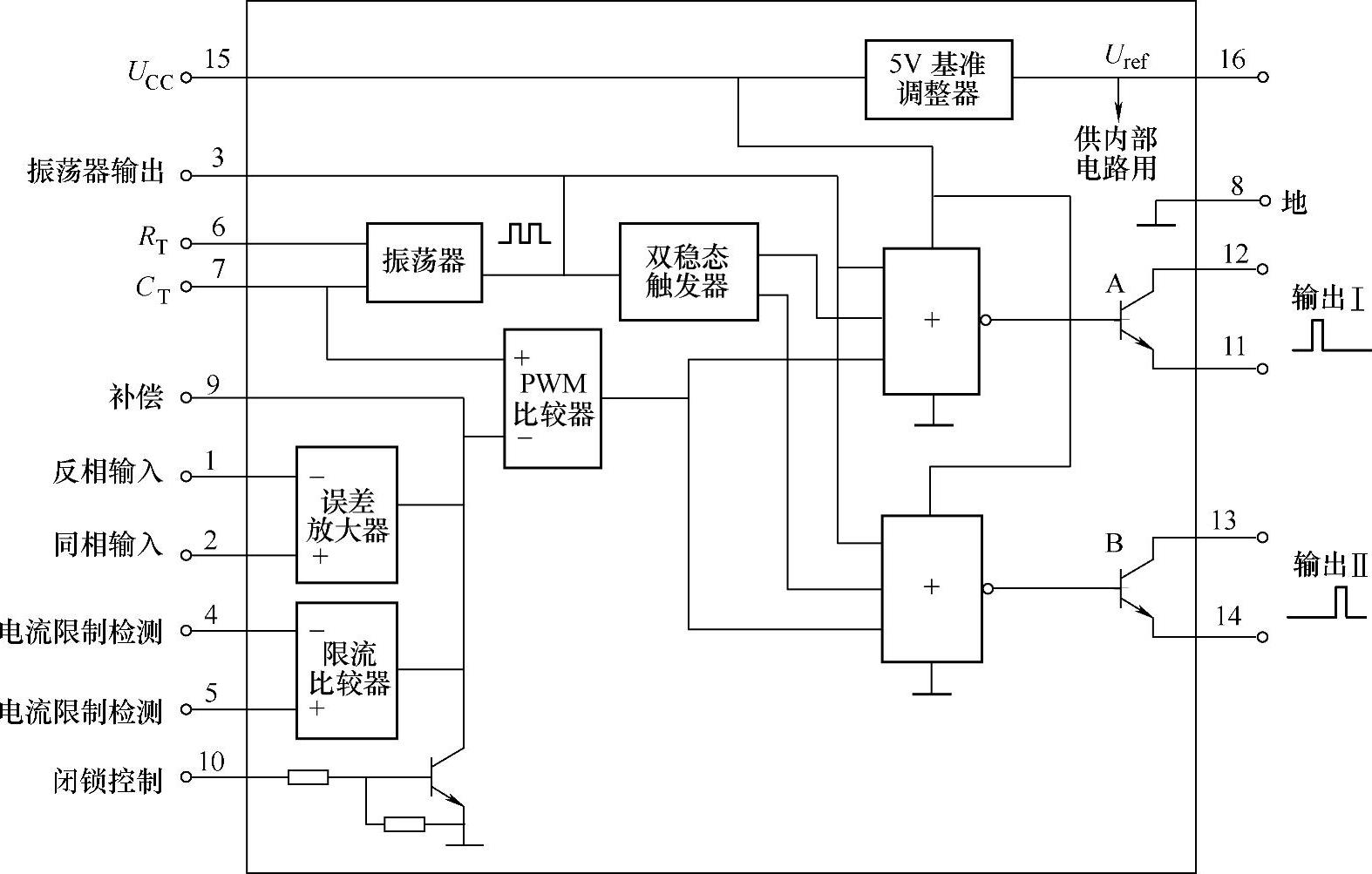
图6-17 SG3524的内部结构图
如图6-17所示,SG3524主要功能块包括基准电压产生电路、振荡器、误差放大器、限流比较器、PWM比较器、脉冲分配双稳态触发器、脉冲合成门电路和输出驱动管,以及保护闭锁控制电路等。
SG3524的供电电压最高值为40V,最低电压为8V;输出电流为100mA;双路输出,每路输出的最大脉冲占空比为45%;最高脉冲频率为30kHz。
SG3524振荡频率f的设定范围是100Hz~300kHz,由外接电阻RT(第6脚名称标注RT意味着应外接电阻RT,即将RT接在第6脚和芯片地线之间)、电容CT(第7脚名称标注CT意味着应外接电阻CT,即将CT接在第7脚和芯片地线之间)决定。RT的取值范围是8~100kΩ;CT的取值范围是0.001~0.1μF。可以根据SGX524产品说明手册提供的定频曲线来选择具体的RT、CT值。振荡频率也可以由下式估算然后进行调整:

SGX524具有交替输出的两路PWM脉冲,频率的温度稳定性好,但是该芯片只有过流保护电路,没有过压保护电路,无软启动控制功能;输出电流小,需要配备脉冲功率放大驱动电路。
2.SGX525/X527系列集成PWM控制器
SGX525系列(包括SG1525、SG2525、SG3525等)PWM控制器也是属于频率固定的单片集成脉宽调制型控制器的类型。SGX525在SGX524基础上增加了欠电压锁定电路、软启动控制电路、外同步控制、PWM锁存器,输出驱动改为图腾柱(推拉)输出形式,输出电流增大到0.5A,增强了驱动能力,振荡频率f的范围变为100Hz~500kHz。另外,其基准电源、误差放大器、限流比较、PWM比较器等部分都进行了改进,使其工作更合理、更可靠、更准确,是一种性能优良的集成控制器。
SGX525和SGX527的内部电路仅输出级不同,前者输出正脉冲,后者输出负脉冲。SG1525、SG2525和SG3525内部结构相同,只是工作电压和工作温度有些差异。以SG3525为例进行介绍,内部电路结构如图6-18所示。
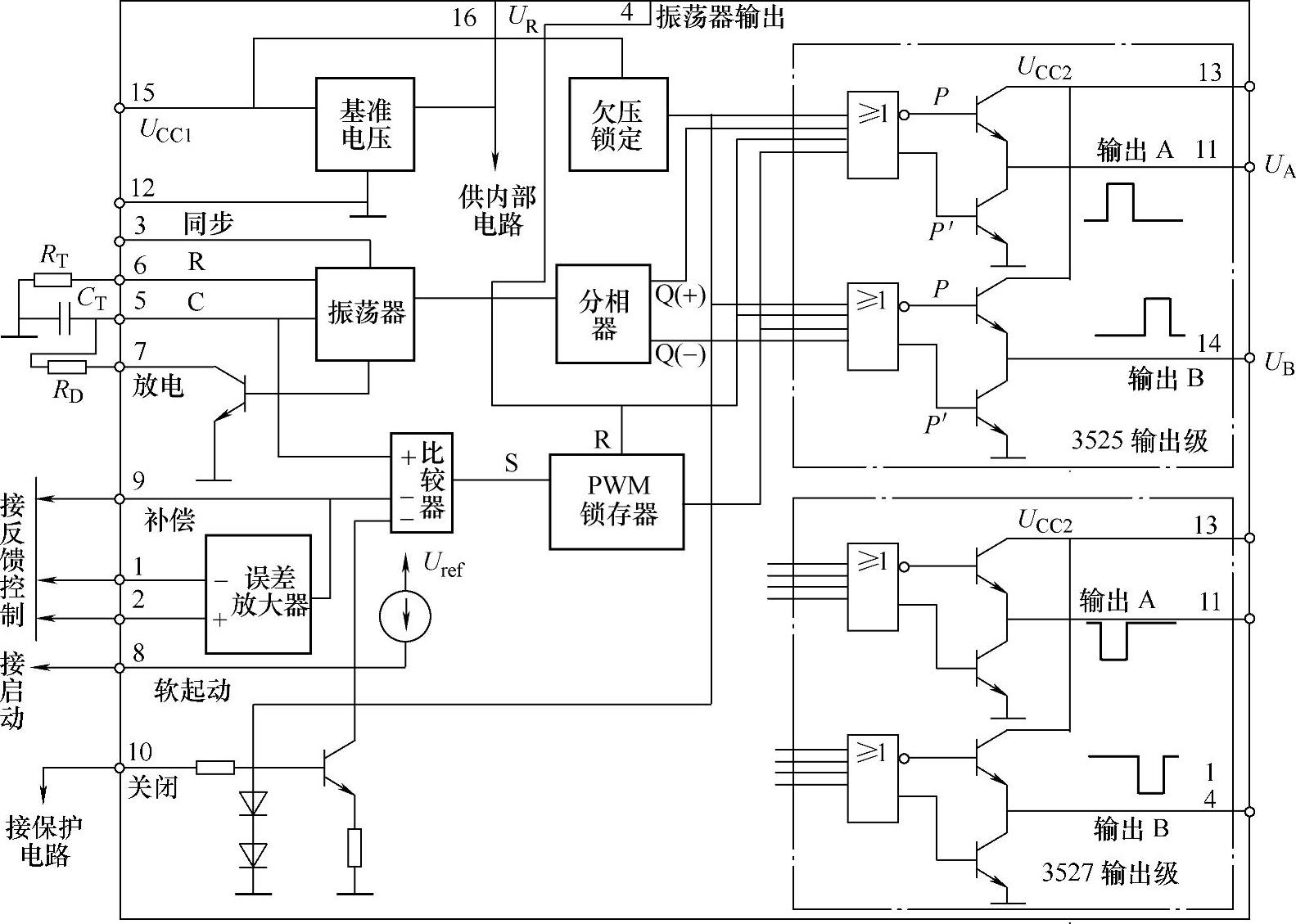
图6-18 SG3525的内部结构图
如图6-18所示,SG3525电路由基准电压源、振荡器、误差放大器、PWM比较器、锁存器、分相器、欠电压锁定、输出级、软启动以及关断电路组成。
SG3525输入电压(15脚)施加给芯片内部的基准电压源,输入电压范围一般为直流8~35V。基准电压源采用了温度补偿,输出电压精度可达5.1V±0.1%。基准电压源可作为SG3525内部电路的供电电源,也可向外输出40mA电流,并设有过流保护电路。
SG3525的误差放大器是一个两级差分放大器,直流开环增益70dB。一般常见的是将其同相输入端(2脚)接基准电压或零,外部反馈信号、给定信号由反相端(1脚)输入;或将外部反馈控制信号直接从误差放大器的输出端(9脚)输入。
振荡器内部由一个双门限比较器、一个恒流源及电容充放电电路组成,5、6、7脚分别连接电容CT,电阻RT、RD。振荡器在CT上产生一锯齿波,如图6-19所示,峰点电压UH=3.3V、谷底电压UL=0.9V。内部恒流源通过RT给CT充电,充电时间t1取决于RTCT;CT通过RD放电,放电时间t2取决于RDCT。锯齿波上升边对应CT充电,锯齿波频率(也是逆变器工作频率或其倍数)可按下式计算:

由于振荡器的双门限比较器的门限电平(UH和UL)由基准电压取得,精度很高,而且CT的充电恒流源对电压及温度的稳定性较好,因此锯齿波频率稳定度可达1%。
振荡器在4脚输出一对应锯齿波下降沿的时钟信号,其宽度等于t2,t2对应的是逆变脉冲中的死区时间。死区时间为1.3RDCT,调节电阻RD的大小可以设置死区时间,RD越大,死区时间越长;反之,死区时间减小。这也是与SGX524另一个不同之处。
振荡器还设有外部同步输入端(3脚),在此脚加直流或高于振荡器频率的脉冲信号,可实现对振荡器的外同步。
PWM比较器是SGX525信号变换的关键器件,它的反相端接误差放大器的输出(9脚),同相端(5脚)接振荡器输出的锯齿波。经过PWM比较器后,外部输入的模拟控制信号变换成了宽度可调的脉冲信号,再经PWM锁存器,可保证在锯齿波的一个周期内只输出一个PWM脉冲信号。
PWM比较器的输入端设有软启动(上电时脉宽逐渐增加)及关闭PWM信号的功能。在8脚接一个几微法的电容可实现软启动控制;外部过电流、过电压等异常信号以高电平的形式加至10脚,可关闭PWM信号的输出。
SGX525的输出级采用了图腾柱结构,两路输出,相位相差180°。此外,SGX525还存在欠电压锁定功能,15脚输入电压低于规定电压后,切断控制信号和PWM信号。
SGX525各部分工作波形如图6-20所示。误差放大器输出端的电压与锯齿波输入到PWM比较器进行比较运算,输出PWM脉冲信号。此信号经PWM锁存器后,与时钟信号及分相器输出的Q(+)或Q(-)信号进行“或非”运算,输出UA、UB两路脉冲信号。
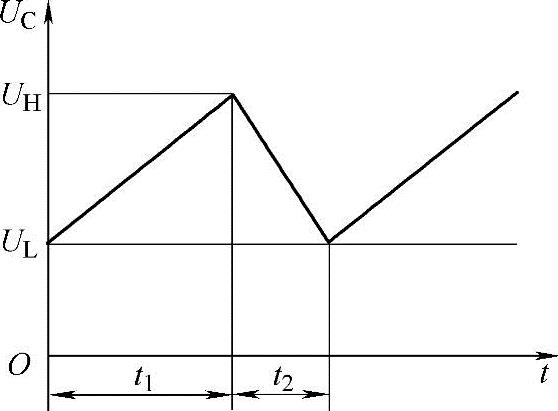
图6-19 锯齿波
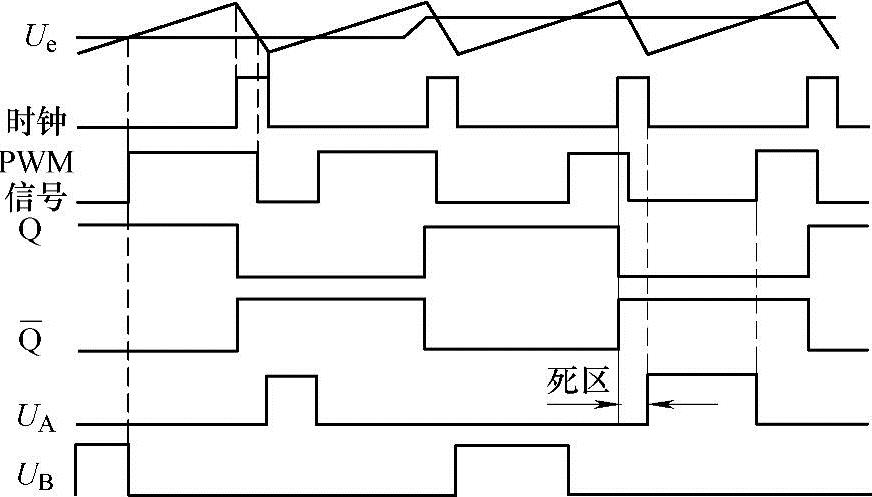
图6-20 SGX525工作波形图
误差放大器输出端电压越高,输出脉冲UA、UB信号占空比越大,亦即脉冲宽度越宽;反之,脉宽变窄。
3.UCX846/X847系列集成PWM控制器
UCX846/X847是电流型PWM控制器。该控制器中,是将逆变电源中的输出电流或者功率半导体开关器件通过的电流信号引入到PWM控制器中,形成一个电流反馈环,组成了电压、电流双闭环逆变电源控制系统,使逆变电源的控制更快、更准,使过载、短路保护更为有效,系统动特性更好,适用于负载或输入电压有突变或变化较大的情况,因此在现代逆变式弧焊电源得到了越来越多的应用。
图6-21为PWM控制系统结构框图,其中图6-21a为电压型PWM控制系统框图,图6-21b为电流型PWM控制系统框图。由图6-21可见,电流型PWM控制系统中增加了一个局部的电流负反馈控制。
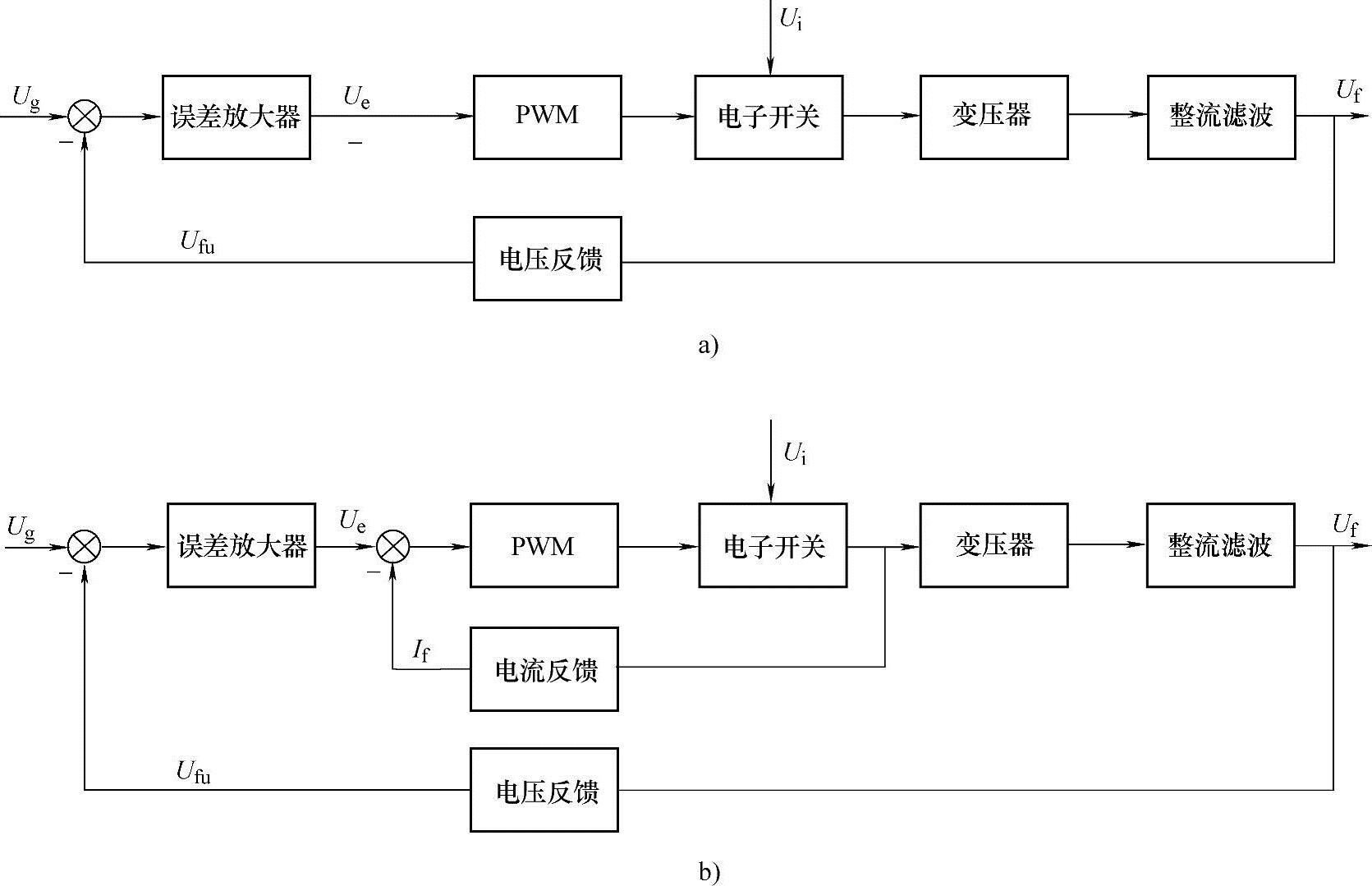
图6-21 PWM控制系统框图
a)电压型 b)电流型
电流型PWM控制器UCX846和UCX847的内部结构和性能基本一致的,所不同的是在tOFF期间,UCX846输出为低电平,而UCX847输出为高电平。现以UCX846为例介绍其工作原理。
以UC3846为例,内部结构框图如图6-22所示,其中包括基准电压、振荡器、PWM比较器、锁存器、输出合成与驱动、电源电压欠电压锁定电路以及电压误差放大器、电流测定放大器、电流限制和故障信号关闭电路等。
如图6-22所示,引脚1为限流电平设置端;引脚2为基准电压输出端;引脚3为电流检测放大器的反相端;引脚4为电流检测放大器的同相输入端;引脚5为误差放大器的同相输入端;引脚6为误差放大器的反向输入端;引脚7为误差放大器的反馈补偿端;引脚8为振荡器的外接电容端;引脚9为振荡器的外接电阻端;引脚10为同步端;引脚11为PWM脉冲的A输出端;引脚12为接“地”端;引脚13为输出晶体管集电极电源端;引脚14为PWM的B输出端;引脚15为芯片的供电电源输入端;引脚16为关闭端。
如图6-22所示,UC3846控制芯片通过一个电流测定放大器来获得逆变电源中电感电流或功率半导体开关器件中的电流信号,其输出接到PWM比较器的同相端;电压误差放大器的输出经过一个二极管和0.5V偏压后接到PWM比较器的反相端,其输出既作为给定信号,同时又被限流电平设置引脚(引脚1)钳位在+0.7V,从而可以进行逐个脉冲限流控制,这也是电流型PWM控制器的特点。由于逆变器中功率半导体开关器件寄生电容放电,以及二极管反向恢复、功率半导体开关器件的阻容吸收等,检测的电流会有一个较大的尖峰,该尖峰电流可能使电流测定、PWM电路误动作,所以应在电流取样电路中增加滤波电路。
UCX846为双端图腾柱式输出,其最大输出推拉电流为可达500mA,额定工作电压为40V,它具备了以PWM方式控制逆变式弧焊电源工作所需的全部控制功能。
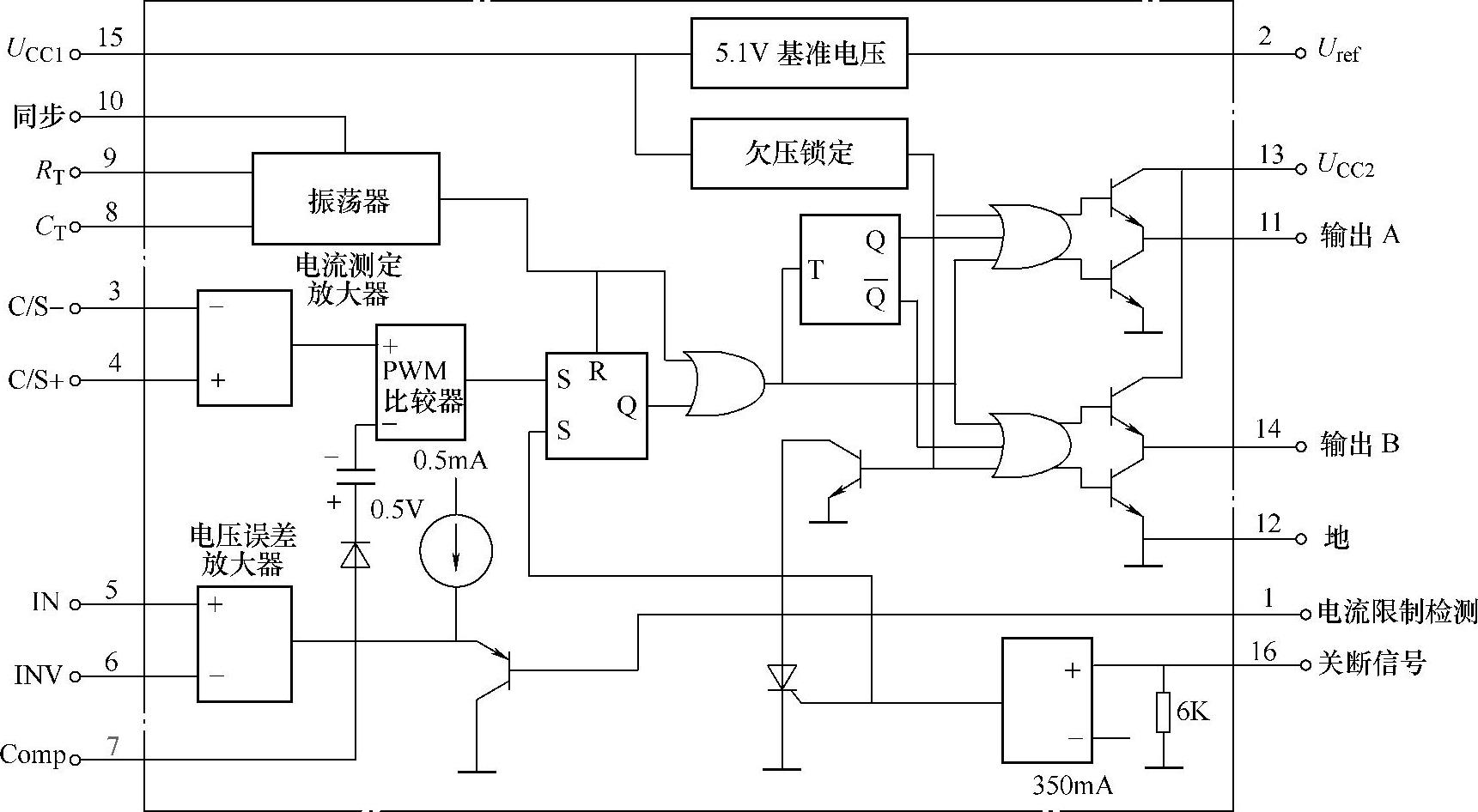
图6-22 UC3846的结构框图
电流型UC3846的关断时序、工作时序图如图6-23所示。
UC3846振荡器具有可变死区时间控制和外同步能力,整个控制器可以工作到500kHz,其工作频率可达1MHz。外接振荡电阻RT(1~500kΩ)、振荡电容CT(μF)(>1000pF)的不同组合可以确定相应的振荡频率f(kHz)和死区时间td(μs):
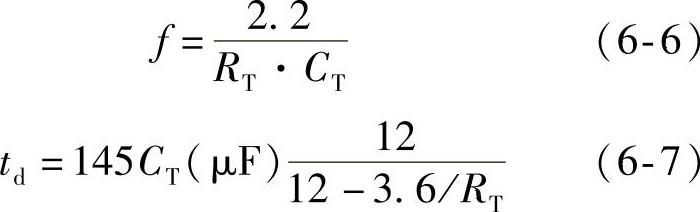
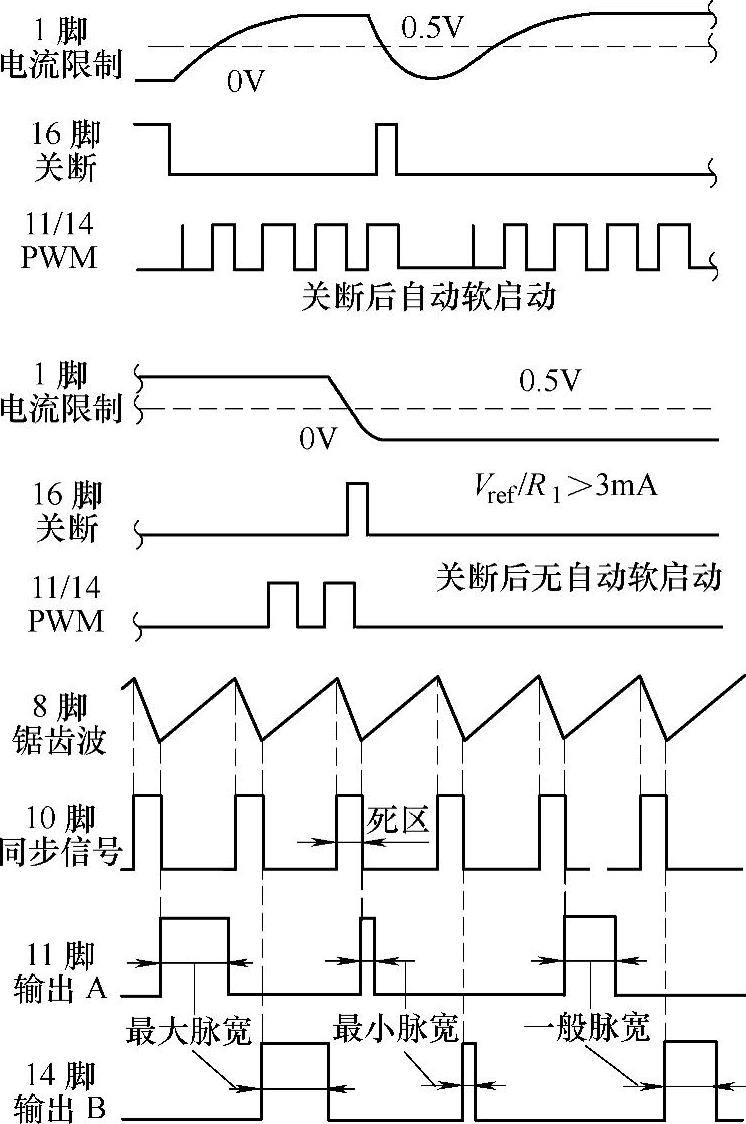
图6-23 UC3846工作时序图、关断时序图
分析图6-22的工作时序图可知,死区时间td等于8脚斜波信号的下降时间和10脚输出矩形波的宽度。UC3846内部基准电压为5.1V,精度±1%,可输出电流30mA。为确保电路功能的正常发挥,内置的欠电压锁定比较器的回滞特性可防止阈值变化时产生的不稳定输出。由调制脉冲触发的T触发器起分频作用,可彻底消除从一路输出两连续脉冲的可能性。
有关现代弧焊电源及其控制的文章

图4-16串联型充放电控制器其他元件的作用和串联型充放电控制器相同,不再赘述。检测控制电路包括过压检测控制和欠压检测控制两部分。图4-17控制器的过、欠电压检测控制电路图检测控制电路是由带回差控制的运算放大器组成。图4-18控制器的命名......
2023-07-02

在除湿运行时,通过微控制器应能将室内机的贯流风扇自动设定为低速挡,并且睡眠和温度设定等调控功能均应有效。总之,微控制器的控制功能较多,在不同品牌型号的机型中,又有多种不同型号的控制芯片,并在各自不同的自编程软件控制下自动完成各项控制功能,但它们的工作原理是一致的。......
2023-06-19

电渗析过程的原理如图6-15所示,该过程使用带可电离的活性基团膜从水溶液中去除离子。与此同时,在电极和溶液的界面上,通过氧化、还原反应,发生电子与离子之间的转换,即电极反应。发生的电极反应如下:图6-15电渗析原理示意图所以,在阴极不断排出氢气,在阳极则不断有氧气或氯气放出。在电渗析过程中,电能的消耗主要用来克服电流通过溶液、膜时所受到的阻力以及进行电极反应。......
2023-06-19

图10-37 典型机械控制式微波炉的电路原理当使用火力控制开关选择烧烤功能时,火力控制开关中的S5-3接通,S5-1与S5-2断开。电脑控制式微波炉的控制电路是采用微处理器为核心的自动控制、自动检测和自动保护的控制电路。图1038 典型电脑控制式微波炉的电路原理......
2023-06-26
图8-16所示为活塞式蓄能器工作原理图。当手动滑阀5在图示位置时,柱塞泵6的柱塞在重力作用下缩回,液压泵1通过单向阀2向蓄能器3供油。当油压升高到一定值时,卸荷阀4动作,液压泵1卸荷,单向阀2阻止蓄能器3的高压油返回液压泵。突然停电或液压泵发生故障、液压泵中断供油时,蓄能器能提供一定的油量作为应急动力源,使执行元件能继续完成必要的动作。......
2023-06-28

衔铁的振动既会产生噪声,又会使电磁系统以及与之刚性连接的零部件加速损坏,甚至它还有可能导致开关电器的触头发生振动,加重触头的电气磨损,引起触头熔焊,最终破坏开关电器的正常工作。因此,必须采取适当的技术措施防止电磁系统发生这种有害振动。这种导体环起到将磁通分相的作用,故称为分磁环,又由于此环系短接且电阻甚小,故又称为短路环。图4-30磁环及工作气隙的等效磁路图有分磁环时的磁极;气隙部分的等效磁路......
2023-06-30

前面介绍的脉宽调制器基本原理是基于模拟脉宽调制器展开的,随着数字化控制技术的发展,目前出现了许多集成PWM控制电路,它们为脉宽调制传动系统的设计提供了方便,提高了系统的可靠性。下面将对常见的集成PWM电路进行简单的介绍。......
2023-06-25
相关推荐