图6-1 启保停电路通过分析,可以看出这种电路具备启动、保持和停止的功能,这也是“启保停”电路名称的由来。在实际的电路中,启动信号和停止信号可能由多个触点或者比较等其他指令的相应位触点串并联构成。......
2023-06-15
1.比例(P)控制器
比例控制器如图4-3所示。比例控制器的输出信号以一定比例复现输入信号。当输入信号ui为阶跃函数时,输出信号u0(称为阶跃响应)也是阶跃函数,其幅值是ur的Kp倍。即
u0=Kpui (4-2)
其中,Kp=-Rf/R0,为比例系数。
由式(4-2)可见,比例控制器的输出与输入成比例的变化而与时间无关。显然,比例控制反应迅速,调节及时,它的输出完全由输入的当前值所决定。
无论是哪一种实际结构,也无论操作功率是什么形式,比例控制器实质大都是具有可调增益的放大器。
2.积分(I)控制器
图4-4为积分控制器原理图,输出与输入的关系为

其中,Ti=R0C1,为积分时间常数。

图4-3 P控制器
a)原理图 b)响应曲线

图4-4 I控制器
a)原理图 b)响应曲线
系统的阶跃响应为一条随时间线性增长的斜线,增长的速度与积分时间常数Ti成反比,与输入信号ui的大小成正比,即u0=t/Ti·ui。积分控制器的输出量不可能无限制地增长,它受到电源电压,或输出限幅电路的限制,其阶跃响应曲线如图4-4b所示。
积分控制器的输出特性有三个特点:
1)只要ui≠0,u0总要逐渐增长(达到饱和时为止)。
2)只有ui=0时,u0才不增长,并保持为某一固定值。
3)只要输出达到饱和值,那么必须等输入信号ui变极性后,输出u0才能减小,控制器才能退出饱和状态。
综上所述,积分器具有延缓作用、积累作用和记忆作用,积分器的输出并不取决于输入量的现状,它取决于输入量的全部历史状态。
3.比例积分(PI)控制器
比例积分控制器原理如图4-5a所示。比例积分控制器输出与输入的关系为

其中,Ti=R0C1,为PI控制器积分时间常数;
Kp=-R1/R0,为PI控制器比例放大系数。
系统的阶跃响应曲线如图4-5b所示,即u0=(Kp-t/Ti)ui。比例积分控制器的输出由比例和积分两部分组成。当输入信号为阶跃信号时,由于Cl两端电压不能突变,Cl相当于短路,此时整个控制器相当于比例控制器,其输出先跳变到Kpui,实现快速控制。随着Cl被充电,控制器又相当于积分器,输出按积分作用随时间线性增长。同样,当控制器进入深度饱和状态后,必须等输入信号改变极性,才能使控制器退出饱和状态。
PI控制器在频率较低时主要起积分器的作用,而在高频时主要起线性比例放大器的作用。
由于PI控制器综合了P控制器和I控制器的优点,比例部分能迅速响应控制作用,积分部分则可以最终消除稳态误差,因此在控制系统中得到广泛的应用。
4.PD控制器
图4-6a是PD控制器电路原理图。如果输入信号为单位阶跃信号时,其系统响应为

其中,Kp=-(R1+R2)/R0,为PD控制器比例系数;
Td=(R1R2)C1/(R1+R2),为PD控制器微分时间常数。

图4-5 PI控制器
a)原理图 b)响应曲线
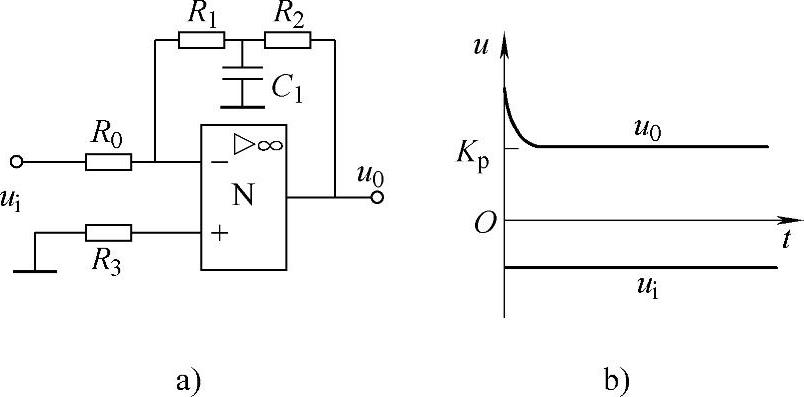
图4-6 PD控制器
a)原理图 b)响应曲线
当控制器的输入端输入一个阶跃信号ui的瞬间,反馈电压被电容Cl旁路,反馈到输入端的电压很小,故输出电压突然增至很大。随着C1充电,输出电压逐渐降低,C1充电结束后,C1相当于开路,控制器相当于P控制器,输出电压与输入电压成比例变化。系统的阶跃响应曲线如图4-6b所示。
由此可见,PD控制器具有超前控制的作用,即当控制信号有变化趋势时,PD控制器立即输出一个幅值很大的控制信号,用来加快响应过程或补偿系统的惯性。但是微分控制作用也使噪声信号得到放大,有可能使系统的执行机构达到饱和状态;而且微分控制作用只能在瞬态过程中发挥作用,因此微分控制一般不单独应用。
5.PID控制器
图4-7a为单个运算放大器构成的PID控制器原理图。如果输入信号为单位阶跃信号时,其单位阶跃响应为

其中,Kp=-R1/R0,PID控制器比例系数;
Ti=R1C1,PID控制器积分时间常数;
Td=R2C2,PID控制器微分时间常数。
C2>>C1,R1>>R2。
在控制器输入端输入一个阶跃信号ui的瞬间,反馈电压被电容C2旁路,反馈到输入端的电压很小近于零,输出电压突然增至很大,起微分控制作用。随着C2充电,反馈到输入端的电压逐渐增大,控制器输出电压逐渐降低。C2充电结束时,输出下降到某一数值,该数值与输入成比例。由于Td=R2C2比较小,故微分作用时间很短。随着C1充电,反馈到输入端的电压又逐渐减小,输出逐渐增加,实现积分作用。系统的单位阶跃响应曲线如图4-7b所示。
由此可见,三种控制作用的组合作用具有三个独立控制作用各自的优点。
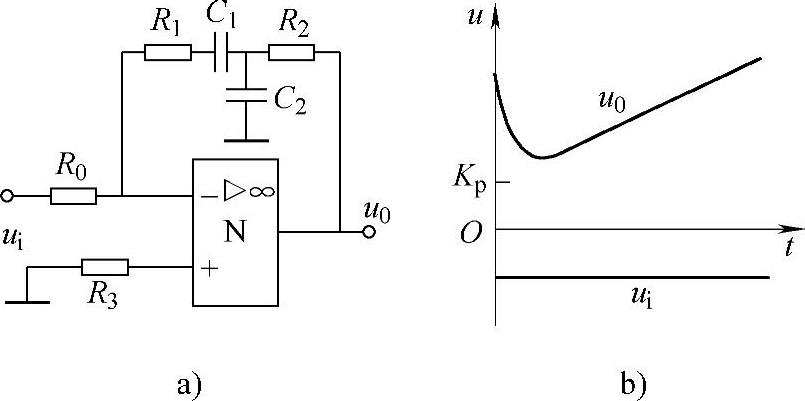
图4-7 PID控制器
a)原理图 b)响应曲线
有关现代弧焊电源及其控制的文章

图6-1 启保停电路通过分析,可以看出这种电路具备启动、保持和停止的功能,这也是“启保停”电路名称的由来。在实际的电路中,启动信号和停止信号可能由多个触点或者比较等其他指令的相应位触点串并联构成。......
2023-06-15

用瞬时极性法判定是正反馈还是负反馈。由图可见,引入反馈电阻RE后,使得放大电路的净输入电压UBE=ui-UE减小了,故为负反馈。因此,电路为电流串联负反馈放大电路。综上所述,射极输出器又是一个电压串联负反馈放大电路。Rf对交、直流都有负反馈。图5-19为两级放大电路电压串联负反馈放大电路留给读者分析。......
2023-06-28

功能块PULSEGEN和功能块CONT_C一起,可实现具有脉冲输出的控制器,用于控制比例执行器。在参数分配期间,用户可以激活或取消激活PID控制器的子功能,以使控制器适合实际的工艺过程。......
2023-06-18
如图4-19所示,由于在切换完成后,要求变频器的报警输出信号能维持到操作人员采取措施之后,所以变频器内部控制电路的电源线T1和S1应接至接触器主触点之前。控制电路的工作过程如下:1.工频运行工频运行时,须将转换开关SA旋至“工”位。故障切换当变频器发生故障时,其报警输出端子KF动作。......
2023-06-19

图5-47 信号控制简化电路可见,调节电位器RP4(近控)或RP3(远控),可以改变给定电压Ug,从而改变控制电压信号Uk,导致晶闸管导通角的变化,达到了调节弧焊电源输出电流的目的。图5-47中的运算放大器N4及其外围电路构成了信号比较与PI控制电路。在引弧电路中,将弧焊电源输出电压Uf加到控制线路的48端,经电阻R52和RP14分压,由电位器RP14取出电压反馈信号,经稳压管VS10及电阻R53输入到晶体管VT9的基极。......
2023-06-30
连续控制系统中的PID控制规律为式中 KP——比例系数;TI——积分时间常数;TD——微分时间常数;e——偏差;u——控制量。一个线性连续系统的模拟PID控制系统原理框图如图10-36所示。图10-36 模拟PID控制系统原理框图一个PID调节器的比例系数、积分时间常数和微分时间常数一旦确定,该控制器的性能随之确定。比例控制可以迅速反应误差,并减小稳态误差。积分控制的作用:积分控制可以对系统误差进行积分,输出控制量,以消除误差。......
2023-08-30

PID功能块提供了比例、积分和微分形式的计算控制。PID运算是非迭代或ISA标准的算法。只要偏差存在,PID功能将对偏差进行积分运算,即将输出向纠正偏差的方向进行。图7-16 PID控制算法功能块PID1.正向和反向作用通过选项参数CONTROL_OPTS中的“Direct acting”位来设置运动的正向或反向作用。若TRK_IN_D或TRK_VAL状态为不可用,输出跟踪功能将关闭,PID状态将回到正常操作状态。......
2023-11-22
相关推荐