C1、L2、C2组成第二级π形滤波抑制电路。R27与IC2构成2.5V基准电压,该电压加到IC3B的3脚同相输入端,反相输入由电阻R30、R31分压取得,分压电压加到IC3B的2脚。同时,由于负载电流超出设计值,通过高频变压器耦合,开关管的源极电流上升,R20检测电压上升,通过R19引起IC1的3脚电压上升。当该电压超过1V时,IC1将关闭6脚输出,第二次起到过电流保护时作用。......
2025-09-29
1.原理与特性
运动载体姿态变化的角位移或角位移的变化率可以用角位移传感器或角速率传感器来测量。陀螺仪是一种敏感角速率和角偏差的传感器,用来测量载体的角运动。测量角速率的传感器称为速率陀螺,测量角位移的传感器称为角度陀螺,统称陀螺仪,简称陀螺。
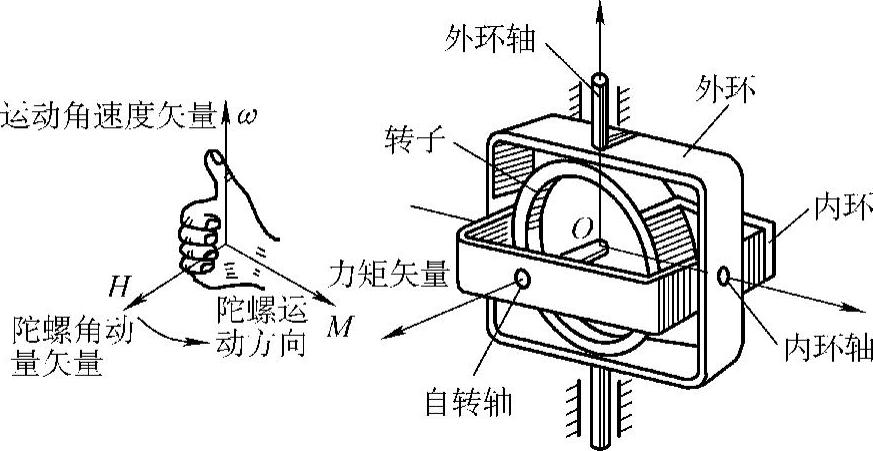
图2-15 三自由度陀螺仪的基本结构和进动规则
陀螺仪是一个高速转动的刚体,三自由度陀螺仪的基本结构和进动规则如图2-15所示。转动轴称为自转轴,转动的刚体称为陀螺转子。陀螺转子通过内环和外环支承在平台基座上,转子能绕内环轴和外环轴自由转动,因此称为双自由度陀螺仪。
由于陀螺转子高速转动,因此具有不同于一般刚体的运动特性——进动性和定轴性。定轴性是指陀螺仪不受外力矩作用时,陀螺转子相对惯性空间的指向保持不变。陀螺仪的进动性和定轴性都是因为转子高速转动时,沿自转轴方向有一定的角动量,也就是有一定的角运动惯性,要改变陀螺仪的角动量需要施加较大的外力矩。角动量H为一矢量,它的矢量计算公式为(https://www.chuimin.cn)
H=JΩ
式中,J为转子的转动惯量;Ω为转子的角速度矢量。
在陀螺仪的内环轴或外环轴上施加一外力矩M(矢量)的作用时,陀螺仪不像一般刚体那样,要沿外力矩方向转动,而是绕自转轴矢量的方向和该力矩矢量方向相垂直的第三轴转动,称为陀螺仪的进动。
2.发展与分类
按工作原理和支承方式可分为:重力框架陀螺、液浮陀螺、挠性陀螺、静电陀螺、激光陀螺、光纤陀螺、压电陀螺等。按测量方式又可分为:测量角度的双自由度陀螺仪和测量角速度的单自由度陀螺仪。
相关文章

C1、L2、C2组成第二级π形滤波抑制电路。R27与IC2构成2.5V基准电压,该电压加到IC3B的3脚同相输入端,反相输入由电阻R30、R31分压取得,分压电压加到IC3B的2脚。同时,由于负载电流超出设计值,通过高频变压器耦合,开关管的源极电流上升,R20检测电压上升,通过R19引起IC1的3脚电压上升。当该电压超过1V时,IC1将关闭6脚输出,第二次起到过电流保护时作用。......
2025-09-29

下面讲解基准目标标注的一般操作步骤。可得,热电偶的热电势等于两端温度分别为T和0℃以及T0和0℃的热电势之差。由此可以得出以下结论:①热电偶的回路总电势只与组成热电偶的材料及两端温度有关,而与热电偶的长度、粗细无关。③只有当热电偶两端温度不同,热电偶的两导体材料不同时,才有热电势产生。如果使EAB=常数,则回路热电势EAB就只与温度T有关,而且是T的单值函数,这就是利用热电偶测温的原理。......
2025-09-29

电阻应变式传感器是利用电阻应变片将应变转换为电阻变化的传感器,当被测物理量作用在弹性元件上时,弹性元件的变形引起应变敏感元件的阻值变化,通过转换电路转变成电量输出,电量变化的大小反映了被测物理量的大小。金属丝式电阻应变片典型的结构如图2-3所示,由敏感栅、基片、覆盖层和引线等部分组成。把应变片粘贴于所需测量的变形物体表面,敏感栅会因被测物体表面变形而导致电阻值改变,测量电阻的变化量便可知变形大小。......
2025-09-29

VIPER53电路是电源拓扑脱线反激式变换装置,原理如图3-8所示,电路由π形EMI低通滤波电路、交流电压桥式整流电容滤波电路、直流变换电路、输出整流滤波电路、反馈取样控制电路等组成。IC1片外的C9、R6是启动时的振荡电路,电路一接通电源,振荡器开始工作。C5、R1、VD1是IC1的钳位电路,保护IC1的漏极。......
2025-09-29
步进电动机定子有多相绕组,各相绕组依次通电。图7.3所示为三相反应式步进电动机原理,其定子有六个极,每极都装有控制绕组,每两个相对的极组成一相,六个极组成三相。步进电动机的绕组通电和断电一般由环形脉冲分配器控制。图7.3 步进电动机原理步进电动机每改变一次通电方式称为一拍,每拍通电转子转过的角度称为步距角θs。......
2025-09-29

超声波传感器是利用超声波的特性研制而成的传感器。超声波传感器可分为整体式和分离式,具有独立完成发射和接收超声波的功能。图5-2-17 焊缝跟踪的横波探头非接触式超声波传感器通过气体介质传播超声波,采用纵波形式,由于超声波在气体介质中传播损耗大,所以必须加入匹配层进行声、电匹配,利用聚焦超声透镜技术提高空气超声波传播器的灵敏度。目前,空气超声波传感器已应用于二氧化碳气体保护焊和埋弧焊。......
2025-09-29

当压电式传感器中的压电元件承受外力的作用时,在它的两个极面上出现极性相反,但电量相等的电荷。因此,压电式传感器不适合于静态测量,而适合动态测量。根据压电式传感器的等效电路,它输出的既可以是电荷,又可以是电压。......
2025-09-29
光电式传感器是指能够将可见光转换成某种电量的传感器。光电式传感器通常由光源、光学通路和光电元件三部分组成。光电式接近开关是由光源与受光器件组合而成的,它利用被检测物体对光的透射或反射,进行物体位置的检测。图5-2-14所示为反射型光电式接近开关的工作原理。图5-2-14 反射型光电式接近开关的工作原理光电式接近开关的体积小、可靠性高、检测位置精度高、响应速度快、易与TTL电平电路兼容,在焊接自动化中的应用非常广泛。......
2025-09-29
相关推荐