双馈变速风电机组由双馈感应发电机、机械传动系统和变流器等组成,如图1-3所示。双馈变速风电机组通过双馈感应发电机把机械能转换成电能,并通过发电机和变流器控制实现可靠并网。文献[29]计及定子电压、电流过渡过程建立了双馈变速风电机组模型,提出了分别基于定子磁链定向和电网电压定向两种改进的矢量控制方案,为在电网电压骤降的情况下进行有效控制奠定了基础。......
2023-06-28
双馈变速风电机组的发电机是绕线转子感应发电机,其定子直接与电网相连,转子通过背靠背的整流桥与电网连接,转子侧变流器为电机提供转差频率交流励磁电流。正常发电状态时,双馈变速风电机组为变速恒频发电系统,发电机转速的变化范围较大,一般在0.7~1.3(p.u.)之间。
双馈变速风电机组一般采用Crowbar保护电路实现故障穿越。外部故障发生后,风电机组电磁转矩降低,稳态矢量解耦控制将会增大转子励磁电流,试图使电磁和机械转矩重新回到平衡状态,机组检测转子过电流、电网侧变流器支路过电流、直流环节过电压等,并投入Crowbar保护电路来保护转子侧变流器。该阶段时间短暂,波形复杂,一般持续3~5ms,变压器保护来不及动作,此后双馈感应发电机相当于普通的感应发电机,一直持续到故障消失,Crowbar电路退出运行。电网发生三相短路期间,双馈变速风电机组故障电流is可以近似表示为[1]

式中,φ为投入Crowbar电路时的初始相位角;a1、a2、a3为常数,大小取决于发电机参数与电压跌落水平,且a3≥a1;ω1为电网角频率;ωr为转子转速角频率;Ts′、Tr′分别为定子回路和转子回路的时间常数。
由式(7-1)看出,机端故障电流近似由稳态交流分量、衰减直流分量以及衰减交流分量三部分构成。其中,衰减交流分量为故障初期机端电流的主要构成部分,其频率取决于当前转速,即故障前的运行工况。双馈变速风电机组的风机转速变化范围一般为0.7~1.3(p.u.),因此不同的运行工况下机端输出故障电流频率将会在35~65Hz范围内变化。图7-1所示是双馈变速风电机组运行在不同工况时的故障电流比较(t=0s时发生三相短路,故障后5ms机组投入Crowbar电路)。当转速为0.8(p.u.)时,故障初期电流的频率约为40Hz,而当转速为1.1(p.u.)时,故障初期电流的频率约为55Hz,均不是工频50Hz。由于该转速频率分量的电流按照转子回路时间常数衰减,约0.2s后交流分量的频率基本为50Hz,其频率与幅值趋于稳定,且对应于恒定的工频分量,因此分析风电场对系统继电保护的影响时,主要集中在故障后0.2s范围内风电机组故障电流偏移对系统继电保护的影响。
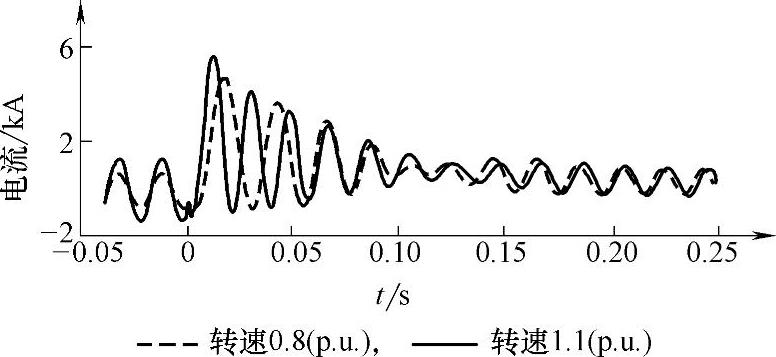
图7-1 双馈变速风电机组不同工况下的故障电流比较
有关风电场建模技术及应用的文章

双馈变速风电机组由双馈感应发电机、机械传动系统和变流器等组成,如图1-3所示。双馈变速风电机组通过双馈感应发电机把机械能转换成电能,并通过发电机和变流器控制实现可靠并网。文献[29]计及定子电压、电流过渡过程建立了双馈变速风电机组模型,提出了分别基于定子磁链定向和电网电压定向两种改进的矢量控制方案,为在电网电压骤降的情况下进行有效控制奠定了基础。......
2023-06-28

风电场的容量相对较小,风电场侧阻抗远大于系统侧阻抗。当风电场送出线路发生不对称故障时,风电场侧电压由电网电压支撑,为50Hz工频分量,而风电场侧电流频率取决于当前风电场运行工况,致使电压、电流频率不同,且常规傅里叶滤波的旁瓣效应使得基于工频量的相量提取不再准确。风电场的弱电源特性会使三相电流幅值相位相近,这时,在风电场侧利用序电流大小及相电流差突变量的常规选相元件,其正确性都将受到严重影响。......
2023-06-28

图3-25电流环的仿真结果图3-26无超调的仿真结果图3-27超调量较大的仿真结果2.转速环的系统仿真转速环的仿真模型如图3-28所示。图3-28转速环的仿真模型图3-29聚合模块对话框图3-30转速环空载高速启动波形图图3-31转速环满载高速启动波形图图3-32转速环的抗扰波形图在工程设计时,首先根据典型Ⅰ型系统或典型Ⅱ型系统的设计方法计算调节器参数,然后利用MATLAB下的Simulink软件进行仿真,灵活修正调节器参数,直至得到满意的结果。......
2023-06-25

风电场风向不变、风速变化时,风电机组的分组不变;风速不变、风向变化时,风电机组的分组是变化的。针对风电机组分组随风向波动而变化的特点,下面计算风电机组风速系数,然后利用风电场风速系数矩阵对风电机组进行分组。通过计算比较可得,利用不同风速的风速系数计算出的风电机组等效风速与取平均风速系数计算出的平均风速相差0.4%左右。与表4-1所示的根据输入风速对风电机组分组结果相同。图4-14 计算风电场内33台风电机组的风速系数......
2023-06-28
双闭环系统采用PI调节器,则其稳态时输入偏差信号一定为零,即给定信号与反馈信号的差值为零,属于无静差调节,下面分别介绍两个调节器的工作情况。双闭环系统的静特性比带电流截止负反馈的单闭环系统静特性好。可以看出,双闭环直流调速系统的正常工作段静特性如图3-3所示的n0A段。图3-4双闭环直流调速系统稳态结构图......
2023-06-25

将式在输送无功功率为零的平衡点处进行局部线性化处理:学习目标了解 ABB 机器人直线、弧线、曲面线路点的编程方法。执行程序时,机器人将 TCP 移至编程位置,程序中所描述的速度与位置就是 TCP点在对应工件坐标中的速度与位置。机器人可以拥有若干工件坐标系,或者表示不同工件,或者表示同一工件在不同位置的若干副本。......
2023-06-22
无刷双馈发电机变速恒频风力发电系统如图1-3所示,其定子有两套极数不同的绕组,一套称为功率绕组,直接接电网;另一套称为控制绕组,通过双向变换器接电网。无刷双馈发电机定子的功率绕组和控制绕组的作用分别相当于标准型双馈发电机的定子绕组和转子绕组。......
2023-06-23

相关推荐