可调电容调整完毕后无法封固,因为无论导体还是绝缘体,各种介质的靠近或侵入都会使电容的容量发生变化,进而影响接收频率。当无线接收模块接收到空间的315MHz信号时,经放大、变频、滤波等处理后输出控制信号,送到第14脚进行解码。图18-11 复位电路图18-12 振荡电路图单片机晶振的作用是为系统提供基本的时钟信号。......
2023-11-04
无线遥控对操作设备的要求较高,本节以遥控距离为1000m的三通道IC型无线遥控器为例,对无线遥控收发装置作一介绍。它可对三种电器设备同时遥控,电路简单可靠,制作方便。
1.无线遥控发射电路
图6-67是发射机电路。它由主振电路和高放电路组成。DF—27是无线遥控器专用发射器件,采用单列封装9引脚集成电路,允许最大功耗600mW、最大空载电流18mA、9~12V直流供电。在外部开关的控制下,产生受一定对应占空比方波调制的高频27MHz间歇波信号。DF—27内部由调宽(占空比)电路、方波发生电路、高频振荡(OSC)电路、调制电路以及高频功率放大电路五个部分组成。调宽(占空比)电路由电流密勒电路(DF—27内部)和开关电路构成,3脚与4脚外接按钮S1、S2,根据开关的不同操作来改变内部开关电路的状态,从而改变2脚外接定时电容器C2的充、放电电流比,1脚外接定时电阻器R1。

图6-67 机器人无线遥控发射电路
高频振荡频率由6、7脚外接选频元件晶振参数决定,通常采用晶体振荡于127MHz的载波信号。调制电路是一种开关电路,载波信号受方波控制,然后送到高频功率放大器放大后,由9脚将高频信号发射出去。
当按钮S1和S2处于断开状态时,方波发生电路输出低电平“0”,无调制状态。载波信号直通混合电路开关到高频功放电路,故这时9脚输出等幅高频波。对应于其他三种开关组合状态,9脚输出占空比分别为25%、75%和50%的间断高频波群信号。
DF—27的9脚送出的高频信号功率很小,发射距离几米至几十米,如满足不了要求,可经过激励级VT1把输入信号放大,推动输出级。激励管VT1工作于丙类共发射极状态,由L4、R3、C8构成自偏压电路。C9、L2回路作为集电极负载,谐振于工作频率,经L2的二次侧将推动信号加到输出管的基极。
输出级VT2工作于丙类共集电极状态,由L5、C11、C12组成的调谐回路接在发射级,VT2的集电极处于低电位。放大后的信号经L6通过L7发射天线向空中发射。串接在输出级回路的电流表指示本级的工作状态,正常工作电流在200mA左右。
2.无线遥控接收电路
接收机电路由晶体管VT1及C2、C4、L1、L2和C3等组成超再生检波电路,如图6-68所示,把天线接收的高频信号中的调制方波信号检出,送往DJ—27接收专用电路引脚2输入放大和比较判断。VT1的电源由DJ—27的引脚1提供约5V电压,产生超再生振荡,调整L1使振荡频率接近发射机和接收机的载频频率27MHz。在这两种频率的差频差拍作用下,在R4上产生出调制方波信号,先经C6、C7、R5滤除高频成分,再经C6耦合隔断直流,C10进一步滤波后加入DJ—27的引脚2。在DJ—27内部经过放大、比较判断后由9、10、11脚输出。
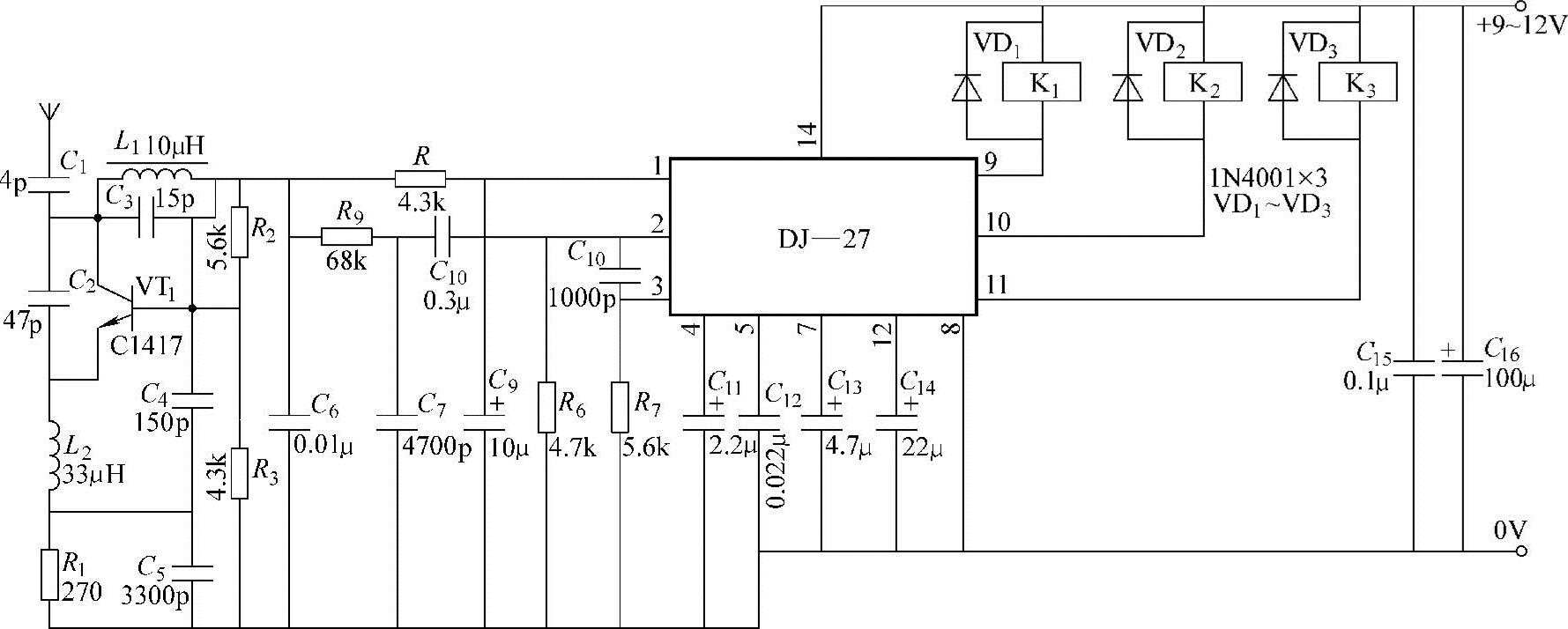
图6-68 机器人无线遥控接收电路
控制机器人的动作过程如下:
当图6-73中的S1、S2断开,不发射信号。接收电路中DJ—27的引脚9~11开路,K1、K2、K3不接通,机器人不工作。S1闭合,发射控制信号,DJ—27的9脚输出低电平,10、11脚开路,继电器K1吸合,接在机器人身上的K1常开触点闭合,机器人开始动作。同理,S2闭合,DJ—27的10脚输出低电平,K2闭合,9、11脚开路,机器人动作。S1、S2同时闭合,DJ—27的11脚输出低电平,K3闭合,9、10脚开路,机器人动作。
有关学习电路图的方法与技巧的文章

可调电容调整完毕后无法封固,因为无论导体还是绝缘体,各种介质的靠近或侵入都会使电容的容量发生变化,进而影响接收频率。当无线接收模块接收到空间的315MHz信号时,经放大、变频、滤波等处理后输出控制信号,送到第14脚进行解码。图18-11 复位电路图18-12 振荡电路图单片机晶振的作用是为系统提供基本的时钟信号。......
2023-11-04

遥控式电子防盗锁 目前常见的遥控式电子防盗锁主要有光遥控和无线电遥控两类。目前接触式卡的技术成熟、价格较低,应用也较为广泛;非接触式卡使用隐蔽、方便,大有后来居上之势。由于数字、字符、图形图像、人体生物特征和时间等要素均可成为钥匙的电子信息,所以电子密码锁还是目前的主流产品。......
2023-11-04

根据操作者在系统中的作用将遥控焊接机器人的运动控制模式分为直接控制、监督控制、共享控制、合作控制、自主控制。图5-5-30 多控制模式的遥控焊接机器人系统研究人员提出“宏观遥控,局部自主”的控制思想来实现遥控焊接。......
2023-06-26

为此,设计一个无线电遥控器,在儿童或高龄老人身上戴上一个发射器,在监护人身上带一个接收器。接收器天线L1接收到发射器的信号后,经L2和C1调谐回路选出与发射器同频率的遥控信号,由于接收的信号很微弱,经VT1、VT2、VT3进行多级放大,推动四声集成音乐片工作,由于输出功率较小,经末级VT4放大后,使扬声器B工作,发出音乐声,提醒监护人,寻找附近的儿童或老人。......
2023-06-28
由于机器人在科学领域和公众的认知中具有更高的优先级,因此对机器人的历史已经进行了更为广泛的统计分析。如2.1节所述,机器人制造商是在机器人技术中早期负责抓取初始开发的人员。Unimate机器人作为George Devol和Joseph Engelberger的创意,是一个重达2 t的机器人,由存储在磁鼓上的程序控制。通用汽车公司估计Unimate机器人的寿命最长为18个月。......
2023-06-15

诚然,从卢森堡移民而来的企业家根斯巴克大力提倡无线电,这里面有他的既得利益。他是业余无线电的先驱,创立了电气进口公司,又称Telimco 。根斯巴克认为,无线电是“将来白手起家的人的最好的基础”。马可尼无线电报公司很快成为向商船和军舰提供无线电设备和服务的主要供应商。这一切固然使参与者兴奋激动,但几千台无线电报机一拥而上,完全放任自流的坏处也随即显现出来。......
2023-11-19

图5-13 遥控器中的主要部件遥控器主要是由微处理器、晶体振荡器、按键区、红外发光二极管、电池以及外围的电容器、三极管等部件组成的。遥控部件中的微处理器在工作时受人工指令的控制,人工指令就是由安装在前面板上的操作按键产生的。......
2023-06-26
目前,机器人分类方法还没有统一的标准,一般有以下几种分类方法。地面机器人主要是指智能或遥控的轮式和履带式车辆。尽管服务机器人的起步较晚,但应用前景十分广泛,目前主要应用在清洁、护理、执勤、救援、娱乐和代替人对设备维护保养等场合。该机器人项目的最终目标是到2050年,开发完全自主仿人机器人队,能赢得对人类足球世界冠军队。......
2023-06-26
相关推荐