由于无换向器电动机本质与普通直流电动机相同,因此其调速系统可以和直流电动机调速系统一样采取转速电流双闭环控制。无换向器电动机调速系统如图6.18所示。无换向器电动机控制一般采用晶闸管器件,成本较低,频率与转速同步,没有失步问题,适用于高电压、大电流、大容量同步电动机调速系统。......
2025-09-29
该电路可对家用电器、电灯开关进行遥控,也可对电风扇(吊扇、台扇、落地扇)实现调速。其主要特点是发送端采用亚超声发射器,无方向性限制,无须电源,经久耐用。接收部分由压电元件等组成。采用LC选频回路及触发电路,结构简单,成本低廉,操作方便。
1.工作原理
1)直流电源电路如图6-40所示。220V交流电源经电容C1降压限流及二极管VD1~VD4全波整流,再经C2、C3滤波,经稳压块7809得到9V直流工作电压。
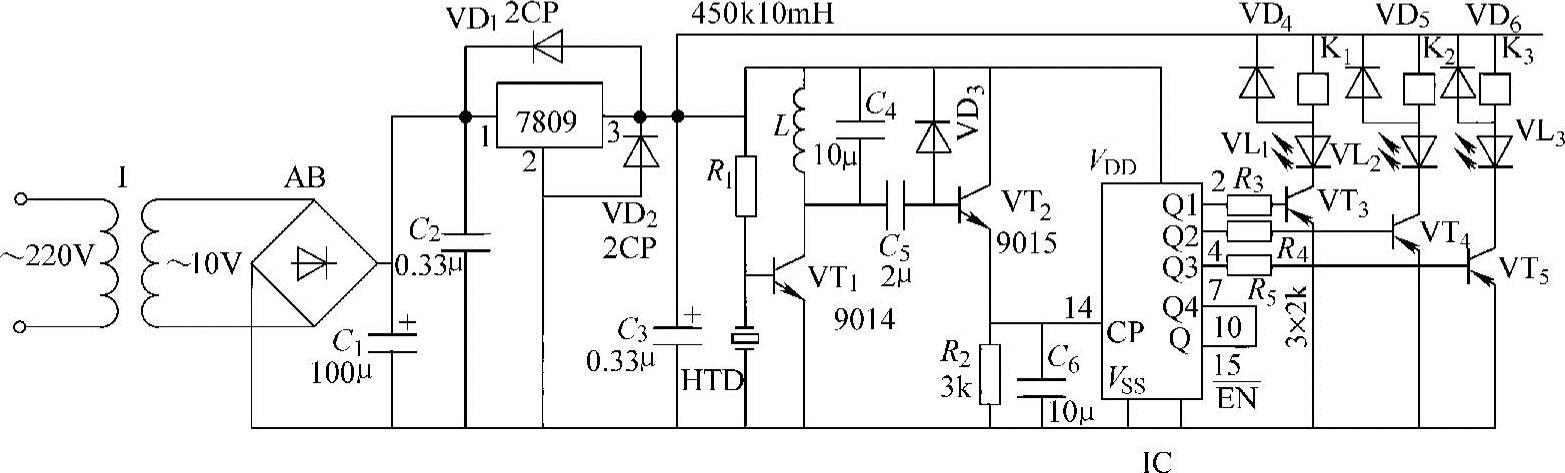
图6-40 超声波遥控调速电路
2)当压电蜂鸣片HTD接收到亚超声信号时,先经VT1放大,由电感L、电容C4组成的选频回路选出亚超声信号,再经电容C5耦合、VD3限幅、VT2放大并输出脉冲。每次操作时,手捏一下发射器VT2集电极就输出一个正脉冲触发信号,由十进制计数器CD4017B计数。由于一般电扇仅需控制三挡调速,因此可采用CD4017的Q1、Q2、Q3档位。当第四次遥控信号到来时,Q4输出“1”,通过IC置“0”端使IC清零,从而保证信号每发出一次,控制器均能自动跳挡。当Q1、Q2、Q3依次输出“1”时,分别推动VT3、VT4、VT5导通,VL1~VL3依次发光,继电器K1~K3依次吸合导通。这样,就实现了电扇控制按0档、1档、2档、3档的先后顺序变化。该电路进行适当变动,可扩充至9档控制。(https://www.chuimin.cn)
2.元器件选择
IC选用CD4017B。VT1选用9014晶体管:VT2选用9015晶体管;VT3~VT5选用9014整流桥AB选用集成电路桥堆晶体管;VD1~VD2选用2CP10,VD3~VD6选用1N4007型塑封硅整流二极管。VL1~VL3选用普通发光二极管,继电器K1~K3选用小型直流继电器,IC选用CD4017B,R1~R5选用1/8W碳膜电阻器。其他元器件的选用如图6-40所示,无特殊要求。
3.制作与调试
将所有元器件焊装在一块自制的印制板上,然后将印制板装入预先制好的机盒中。压电陶瓷片需要有一个共鸣腔才能有较大的音量。最简单的方法是在机盒的面板上开一个20mm的圆孔,在陶瓷底板四周涂些环氧树脂,然后粘贴在机壳面板的内侧,在面板外侧再粘贴一块防护罩,在面板上事先钻几个小孔供放音用,这样一个助声腔即制成了。如果在使用中发现灵敏度过高,可适当改变电容C6的容量及电阻R4的阻值。
相关文章

由于无换向器电动机本质与普通直流电动机相同,因此其调速系统可以和直流电动机调速系统一样采取转速电流双闭环控制。无换向器电动机调速系统如图6.18所示。无换向器电动机控制一般采用晶闸管器件,成本较低,频率与转速同步,没有失步问题,适用于高电压、大电流、大容量同步电动机调速系统。......
2025-09-29

图1.43所示是晶闸管-直流电动机开环直流调速系统主电路模型,模型中主要模块提取路径见表1.11。现以例1.2的双闭环控制直流调速系统为例说明。......
2025-09-29

在这种调速方式中,转子转差功率经不控整流器、晶闸管整流器和变压器回馈电源,因此属于异步电动机转差功率回馈型调速,系统效率比较高,是较节能的交流调速方式。上述回路电阻和换流电压降使绕线转子异步电动机串级调速机械特性较其固有机械特性的斜率大、机械特性软,在负载增加时转速降较大。绕线转子异步电动机串级调速比较异步电动机定子调压调速,其效率提高,调速范围扩大,调速性能好,但是尚不及变频调速。......
2025-09-29

在刚起动时,转子绕组回路的电阻值较大,转子以较慢的转速起动,然后随着转速的加快逐步减小电阻。图3-52a为对称串接电阻起动方式。电动机起动完成后,KM触头闭合,频敏变阻器被短接不起作用,电动机正常运转。图3-52 绕线转子电动机的起动调速方式......
2025-09-29
电动机调速控制电路是指利用时间继电器控制电动机的低速或高速运转,用户可以通过低速运转按钮和高速运转按钮,实现对电动机低速和高速运转的切换控制。图5-52所示为典型电动机调速控制电路。图5-56 电动机高速运转的具体识读分析过程当需要停机时,按下停止按钮SB3,交流接触器和时间继电器全部失电,触点全部复位,电动机停机。......
2025-09-29

以普通晶闸管构成的方波型逆变器被全控型高频率开关组的PWM逆变器取代后,正弦波脉宽调制逆变器及其专用集成芯片得到普遍应用。磁通跟踪型PWM逆变器以其控制简单、数字化方便而又呈现出取代传统SPWM逆变器的趋势。另外,电流跟踪型PWM逆变器及滞环电流跟踪型PWM逆变器也受到了重视。......
2025-09-29

自动弱磁控制直流调速系统是基速以下采用调压调速,基速以上自动进行弱磁升速的调速系统,系统的组成如图2.29所示。图2.29 自动弱磁控制直流调速系统的组成系统弱磁控制过程如下:调节转速给定Un信号,转速上升,在转速没有达到额定转速时,因为电动势反馈信号Ue
2025-09-29

相关推荐