相序改变,电动机定子的旋转磁场反向,产生与电动机原转矩转向相反的反转矩,因而起到制动作用。当电动机转速下降直至停止时,KS断开,KM2释放,制动完毕。在此过程中,产生与转子转动相反的转矩,从而使转子尽快停止,转子的动能消耗在转子回路中,因此称为能耗制动。图6-7 异步电动机反接制动控制电路图6-8 单管整流能耗制动线路......
2023-06-28
1.电动机制动控制的分类
阻止电动机转动,使之减速或停车的措施称为制动。电动机及其拖动的生产机械具有惯性,电动机切断电源后并不能立即停转。因此,要求电动机迅速停车或准确停在某个位置,或缩短辅助工时及保障安全时,都需要采取制动措施。电气制动有以下方法:
(1)反接制动
反接制动是在电动机停车时,将其所接的三根电源线中任意两根对调,由于电源相序改变,会产生一个与原来方向相反的电磁转矩,这对由于惯性作用仍沿原方向旋转的电动机起到制动作用,当电动机转速接近零时,断开电源。这种方法制动转矩大,制动迅速,但制动电流很大,一般要在定子电路中串入电阻。
(2)能耗制动
当电动机停车与交流电源断开后,立即给定子绕组通入直流电流,产生一个静止的磁场,而电动机由于惯性作用沿原方向继续旋转,根据电磁学理论,转子绕组中感应的电流与静止磁场作用,产生一个与原方向相反的制动转矩,使电动机迅速停车。这种方法停车准确,但制动过程要消耗电能,转子发热,一般要在转子电路中串入电阻。
2.制动控制电路
(1)电磁抱闸制动电路
机械制动是利用机械装置使电动机在切断电源后迅速停转。采用比较普遍的机械制动设备是电磁抱闸。电磁抱闸主要由两部分组成,即制动电磁铁和闸瓦制动器。
电磁抱闸制动的控制线路与抱闸原理如图6-6所示。按下按钮SB2,接触器KM线圈得电动作,电动机通电。电磁抱闸的线圈YB也通电,铁心吸引衔铁而闭合,同时衔铁克服弹簧拉力,迫使制动杠杆向上移动,从而使制动器的闸瓦与闸轮松开,电动机正常运转。
按下停止按钮SB1之后,接触器KM线圈断电释放,电动机的电源被切断,电磁抱闸的线圈也同时断电,衔铁释放,在弹簧拉力的作用下使闸瓦紧紧抱住闸轮,电动机就迅速被制动停转。
这种制动在起重机械上以及要求制动较严格的设备上被广泛采用。当重物吊到一定高度,线路突然发生故障断电时,电动机断电,电磁抱闸线圈也断电,闸瓦立即抱住闸轮,使电动机迅速制动停转,从而可防止重物掉下。另外,也可利用这一点将重物停留在空中某个位置上。
(2)反接制动控制电路
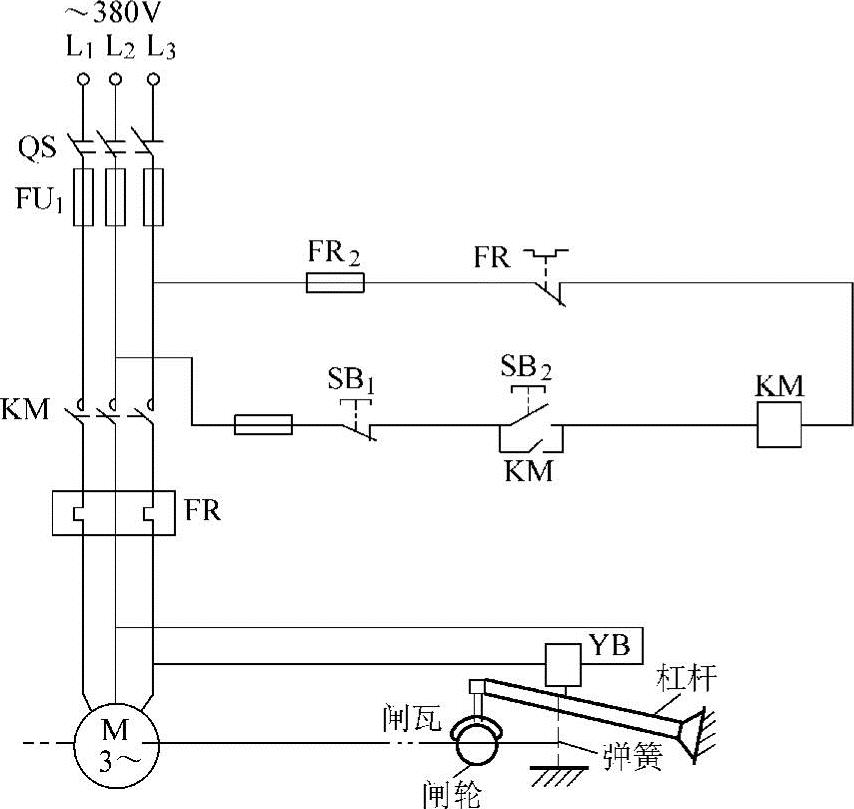
图6-6 电磁抱闸制动控制线路
异步电动机在改变它的电源相序后,就可以进行反接制动。相序改变,电动机定子的旋转磁场反向,产生与电动机原转矩转向相反的反转矩,因而起到制动作用。
异步电动机反接制动线路如图6-7所示。当按下按钮SB1,接触器KM1吸合,使电动机带动速度继电器KS一起旋转。速度转动到额定转速后KS常开触点闭合,做好制动准备。按下SB2停止按钮后,KM1断电,其常闭触点闭合,KS在电动机惯性作用下触点仍然闭合,这时,KM2吸合,电动机反接制动。当电动机转速下降直至停止时,KS断开,KM2释放,制动完毕。
(3)能耗制动控制电路
图6-8所示是单管整流能耗制动线路。当停车时,按下停止按钮SB2,KM1、KT失电释放,这时KT延时断开触点仍然闭合,使制动接触器KM2获电动作,电源经制动接触器接到电动机的两相绕组上,另一相经整流管回到零线。到达整定时间后,KT常开触点断开,KM2失电释放,制动过程结束。在此过程中,产生与转子转动相反的转矩,从而使转子尽快停止,转子的动能消耗在转子回路中,因此称为能耗制动。
这种制动线路简单,体积小,成本低,常用于10kW以下电动机且对制动要求不高的场合。
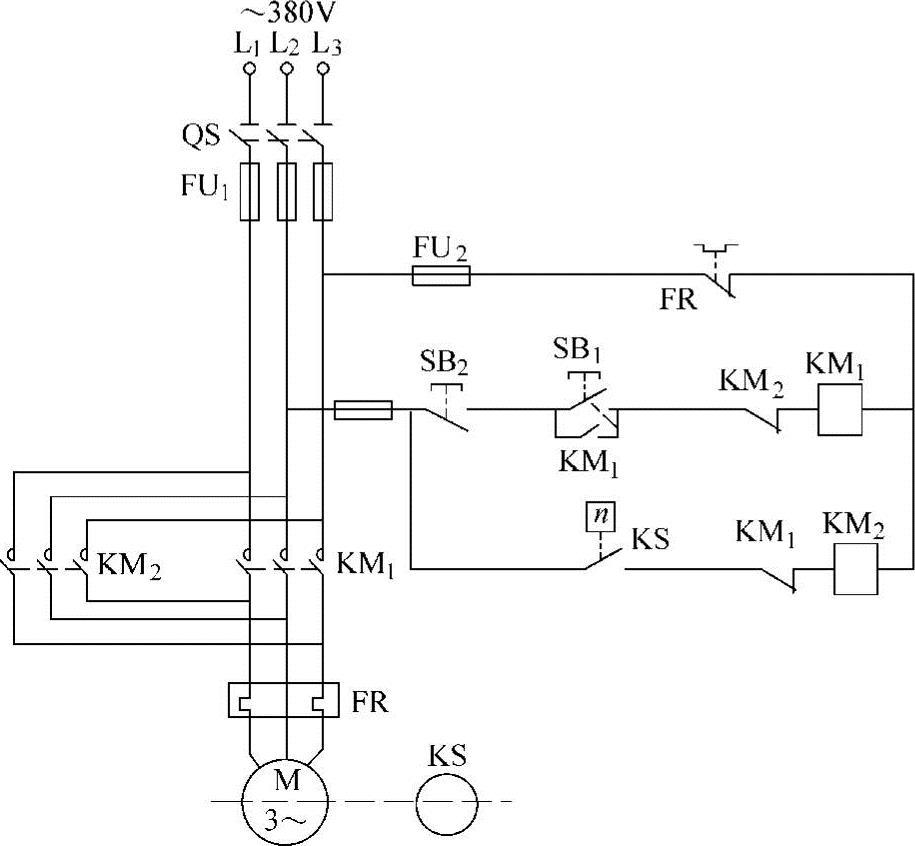
图6-7 异步电动机反接制动控制电路
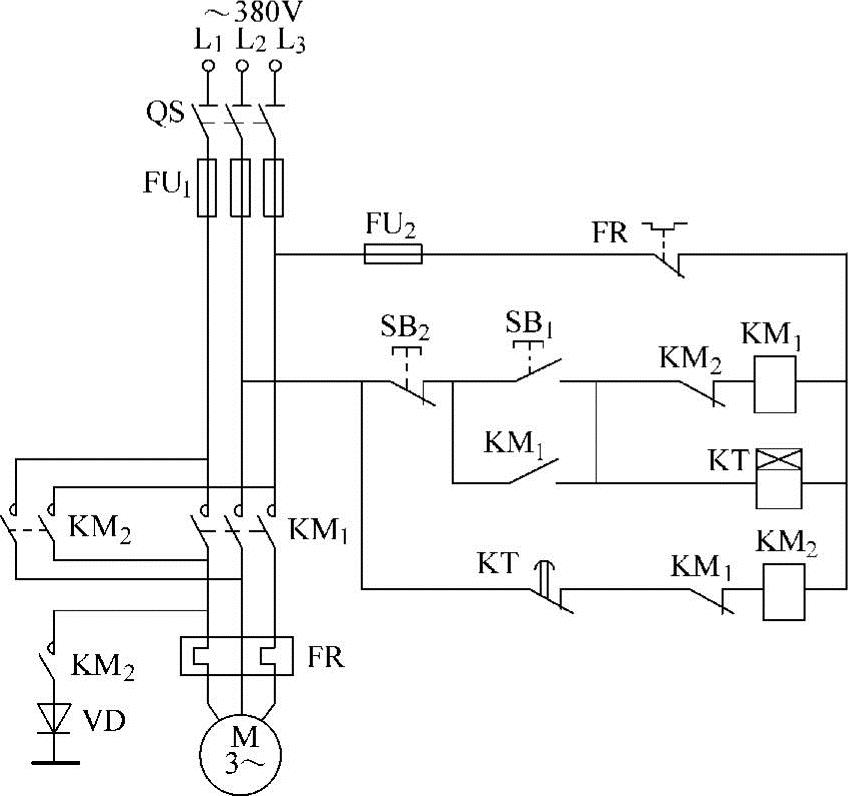
图6-8 单管整流能耗制动线路
有关学习电路图的方法与技巧的文章

相序改变,电动机定子的旋转磁场反向,产生与电动机原转矩转向相反的反转矩,因而起到制动作用。当电动机转速下降直至停止时,KS断开,KM2释放,制动完毕。在此过程中,产生与转子转动相反的转矩,从而使转子尽快停止,转子的动能消耗在转子回路中,因此称为能耗制动。图6-7 异步电动机反接制动控制电路图6-8 单管整流能耗制动线路......
2023-06-28

三相异步电动机电气制动控制是指在其断电停转的过程中,通过三相电源相序的转换或改变其供电条件,使其产生与原旋转方向相反的电磁转矩即制动转矩,将三相异步电动机立即停转或限制其转速的方法。主电路中串入三只电阻,用于限制在反接制动过程中产生的大电流,避免其对三相异步电动机定子绕组的损害。当三相异步电动机正、反转运行需要双向能耗制动时,见图2-20。......
2023-06-15

实操目的1.通过实操训练,进一步加强对三相异步电动机控制电路图的阅读能力。实操用器材、仪表及工具1.电路板1块;2.三相异步电动机1台;3.连接导线若干根;4.万用表1块;5.电工工具1套。......
2023-06-15
图6-14 使用顺序阀的平衡回路1—内控式平衡阀 2—外控式平衡阀 3—单向节流阀 4—溢流阀图6-15 使用专用平衡阀的平衡回路A、B—专用平衡阀的进、出工作油口 X—阀的控制油口图6-16 采用单向行程节流阀的缓冲回路2)制动缓冲回路的关键元件有:溢流阀及其配流机构等。3)典型的制动缓冲回路包括:行程节流阀缓冲回路、溢流阀缓冲回路等。图6-16所示为采用单向行程节流阀(减速阀)的缓冲回路。......
2023-06-15

当三相异步电动机起动完成后,接触器KM1的主触头闭合,由其为三相异步电动机提供电流而正常运行。软起动器不仅能用于三相异步电动机的起动控制,也可用于三相异步电动机的软停止控制,以减少停机过程中所产生的振动。因此,对三相异步电动机和机械传动装置等的损害减到最小程度。......
2023-06-15
在开式系统中,常用节流阀或溢流阀接在液压马达的排油口上,以实现减速或制动。将补油液压泵出口溢流阀2 的调整压力调到较溢流阀3 高0.1 ~0.2 MPa,主油路中液压马达排出的热油经液控三位三通阀、溢流阀3 和冷却器返回油箱,对整个系统进行强制冷却。节流阀的作用是使液压马达处于浮动状态,便于对工作机械调整。......
2023-06-18
生产中经常需要改变电动机的旋转方向,根据三相异步电动机的原理,要改变电动机的转向,只需将电动机接到三相电源的三根电源线中的任意两根对调,改变通入电动机的三相电流相序即可。这样,在正转接触器KM1工作时,它的动断触点KM1断开,将反转控制电路切断;相反,在反转接触器KM2工作时,它的动断触点KM2断开,将正转控制电路切断。图6-2 交流电动机的双重互锁控制电路......
2023-06-28

相关推荐