电弧熔-钎焊 电弧熔-钎焊主要有几种分类方法,如图2-7所示。高能束熔-钎焊高能束熔-钎焊主要包括激光熔-钎焊、电子束熔-钎焊和等离子弧熔-钎焊。......
2023-06-23
确定合适的特征空间是设计目标识别系统的一个十分关键的问题。如果所选用的特征空间能使同类物体分布具有紧致性,不同类别物体彼此分开,即各类样品能分布在该特征空间中彼此分隔开的区域内,这就为分类器设计提供良好的基础。反之,如果不同类别的样品在该特征空间中混杂在一起,再好的设计方法也无法提高分类器的准确性。对特征空间进行优化有两种基本方法,一种是特征选择,即对原特征空间进行删选,另一种就是特征的组合优化,即通过一种映射变换改造原特征空间。
通过对角点检测结果的仔细观察和分析,我们发现,过于密集的角点往往会局限于个例的细节变化,在训练分类器的时候容易产生过拟合现象。而且有一些点是图像获取或传输中产生的噪声,直接对目标的特征描述产生干扰。因此,为了减少分类器的训练复杂度、增强系统的鲁棒性,对特征空间进行适度的优化,是十分必要的。
对于直线投影法检测到的角点,按照在轮廓线上的顺序,如果一个角点与其前后两个角点的距离很近,且这三个相邻的角点和形心的距离相等或接近,则该角点所携带的信息与前后角点有冗余,可以删选掉。于是我们可以通过角点和质心的空间关系,计算出每个角点对于整个形状特征的重要程度,并据此对角点进行筛选:

式中,di表示第i个角点到形心的距离,Di-1,i表示第i-1个角点和第i个角点(按照角点在轮廓线上的顺序)的距离,dmax是角点到形心的最大距离,Dmax是相邻两个角点间的最大距离,ω1和ω2是该项的权重。
由于SUSAN算法不依赖于目标分割得到的轮廓信息,所以无法通过跟踪轮廓来得到角点的顺序,并依此计算每个角点的权重,进行特征空间的优化。但是,我们依然可以从角点负载信息量的角度考虑,将非常密集的角点群用一个点来代替,保留孤立、信息量巨大的角点,从而在优化特征空间的同时保持了目标的基本几何形状。
聚类分析是机器学习领域的一个重要研究方向,目前存在大量的聚类算法,算法的选择取决于数据的类型、聚类的目的和应用。本书选用凝聚的层次聚类方法[128]对原特征空间进行组合优化,以求出一组对分类识别更为有效的特征。这种自底向上的策略首先将每个角点作为一个簇,然后将相似度最大的原子簇合并,直至达到某个希望的簇的数目。簇间相似度是通过计算平均相似度(一个簇中所有对象和另一簇所有对象之间的相似度的平均)得到的:

其中,相似度的度量采用的是欧氏距离。最终,用每个簇的重心(簇的所有角点的平均值)来代表整个簇。两种角点检测算法及其相应的特征空间优化方法的效果,如图7-7所示。
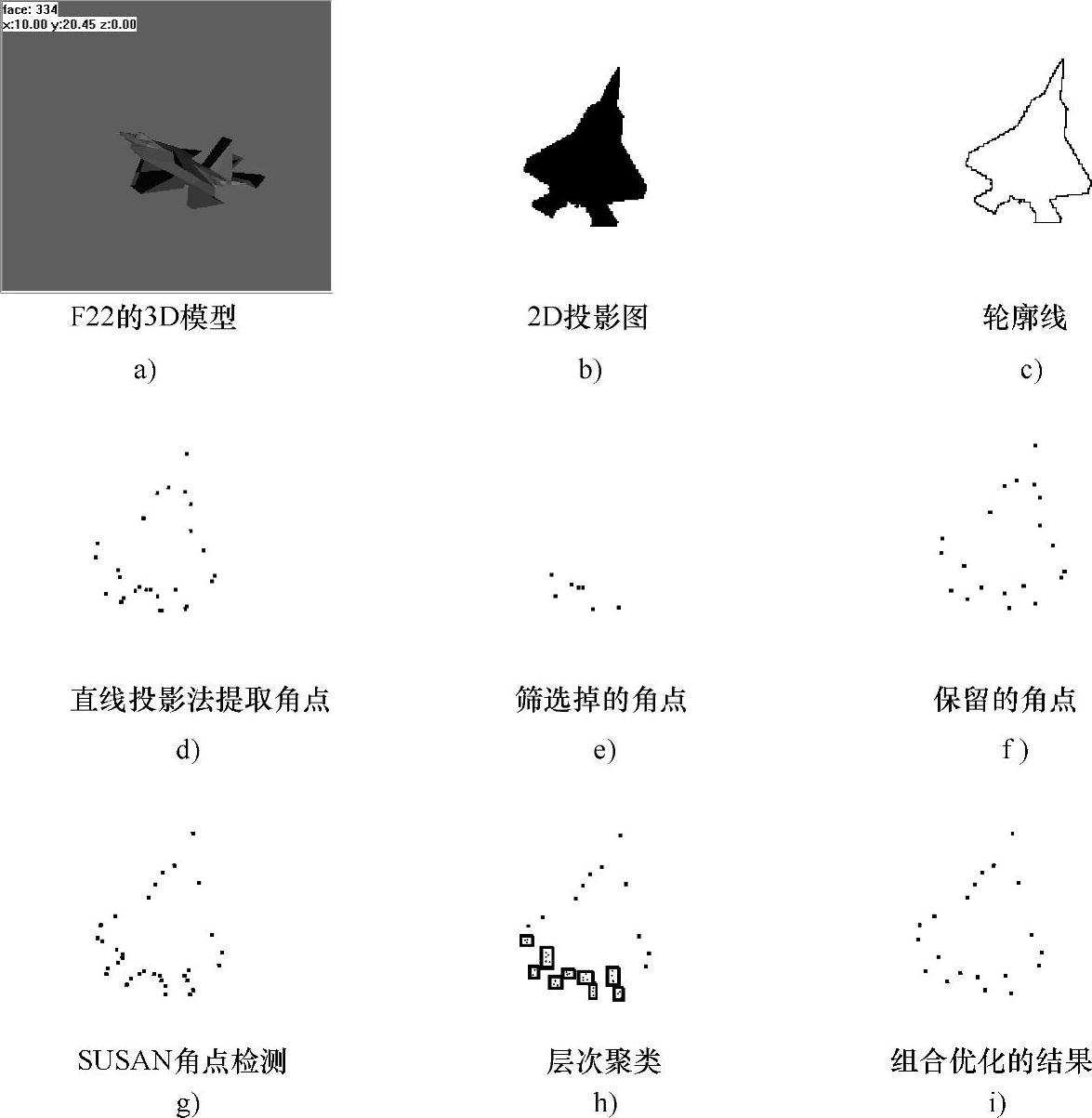
图7-7 对角点特征空间进行优化设计
(d)~e)是进行特征选择,g)~i)是进行特征的组合优化)
有关图像目标的表示与识别的文章

电弧熔-钎焊 电弧熔-钎焊主要有几种分类方法,如图2-7所示。高能束熔-钎焊高能束熔-钎焊主要包括激光熔-钎焊、电子束熔-钎焊和等离子弧熔-钎焊。......
2023-06-23

标记图是一种一维函数的边界表达方法,其典型的生成方法是将从质心到边界线的距离转化成一个角度函数,如图7-8所示。本书提出的角点标记图将标记图的基本思想应用于构造角点特征的过程中,并在保存目标基本信息的同时消除其对尺寸和旋转的依赖性,使得该特征具有平移不变形、比例不变性和旋转不变性。这种模式向量的生成方法依赖于旋转和比例缩放变换。......
2023-06-28

操作加压包扎止血法时先用无菌纱布覆盖和压迫伤口,再用三角巾或绷带用力包扎,包扎范围应该比伤口稍大,在现场没有无菌纱布时,可用消毒卫生巾、餐巾等替代。接触伤口面的敷料必须保持无菌,以免增加伤口感染的机会。髋部及大腿骨折:一人双手托住腰及臀部,伤员用双臂抱住救护者的肩背部,另一人双手托住伤员的双下肢。头部应与车辆行进的方向相反,以免晕厥,加重病情。......
2023-07-01

这一准则放在角部依然适用,白1、白3扳粘是要点,黑4打吃是问题手,白5立下,黑6只能长出,白7吃掉两子。图四黑1接住是失误的下法,这步棋错失了对杀的关键。图五黑1二路立,这是事关生死的要点!本图黑棋角上有4口气,不仅留下了劫材,黑6拐头之后,将来留有诸多借用。图十三黑棋不甘心被吃,走1位抵抗,白2外扳,黑棋气紧的弱点暴露无遗。......
2023-10-30
如果选择电压u和电流i为关联参考方向,如图3.8所示,则这个电流为图3.8电容元件图3.8电容元件电容器的电容量或耐压值不满足需要时,可以将一些电容器适当连接起来满足需要。......
2023-06-24

我国开发区在最初建立时以工业生产用地为主,随着进一步发展,开发区的土地开发方式出现了明显的阶段性、时序性变化。有些开发区甚至一期用地完全置换为城市生活用地,如江宁开发区和西安高新区。图2-3江宁开发区历年土地演变图新城区配套设施是应不同成长阶段所产生的需求而逐渐注入的。......
2024-01-25

相关推荐