在轴承实际使用中,如果作用于轴承上的载荷小于上述各公式估算出的Frmin或Famin,则为了防止轻载打滑,必须对轴承进行预紧。表2-63 最小轴向载荷系数Ka[1]通过滚动体中心与轴承轴线垂直的平面称为轴承的径向平面。包含轴承中心线的平面称为轴向平面。[3]式中对点接触所以取ε=3而对线接触:,,ε=4但是因为滚子轴承的接触形式很多,既有点接触,又有线接触,为统一滚子轴承的寿命计算方法,取ε=。......
2025-09-29
对多维距离向量这种最具代表性的角点描述方法进行深入分析后,不难发现,数量繁多的角点不仅增加了运算时间,同时也给多帧图像中的目标匹配带来了困难,尤其是有噪声干扰和在目标姿态变化的情况之下。为了达到更加高效、灵活的识别效果,本书希望能够选择出目标图像上最具有代表性的角点,根据这些基准角点的位置信息测量物体,并通过测量值来识别目标。
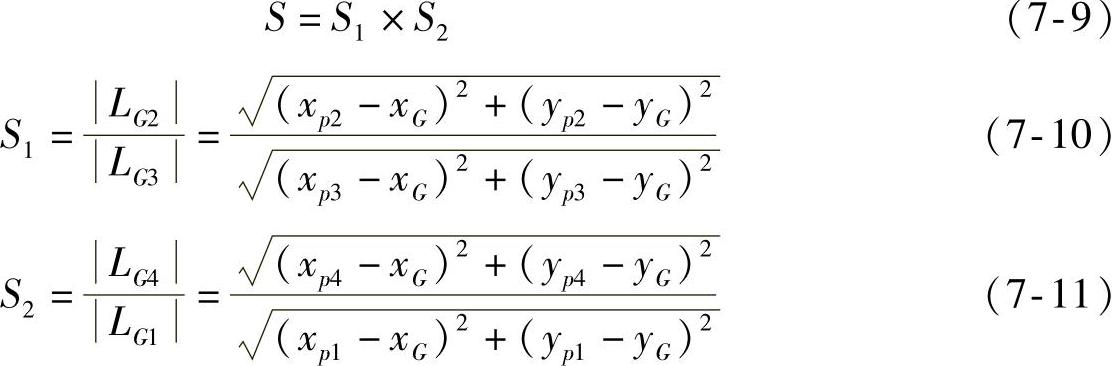
以军事目标飞机为例,测量一个飞机可以利用的最显著的信息就是机头部分、两翼部分和机尾部分的角点,以及它们和飞机重心的位置关系。飞机重心的计算公式如下:

式中,(xG,yG)是重心点G的位置坐标,I(x,y)是像素点(x,y)的灰度值。我们可以通过计算每个角点的相对重心的重心矩,并选择重心矩最大的角点作为第一基准角点P1(xp1,yp1):

式中,C为角点点集,其包含的角点数目为n。
通过重心点G和P1可以得到飞机的一条基准轴线,显然,飞机两翼上的角点都位于这条轴线的两侧。于是这条轴线就把机翼角点点集划分为两个子集:

而两翼上的基准角点就可以定义为距离这条轴线最远的点——第二基准角点P2(xp2,yp2)和第三基准角点P3(xp3,yp3)。角点与基准轴线的距离可以由以下公式计算得到:

第四基准角点P4(xp4,yp4)被定义在机尾,它和第一基准角点P1分别位于基准轴线的两端,也就是重心点G的两侧。如果P1满足以下条件:
 (https://www.chuimin.cn)
(https://www.chuimin.cn)
则P4将满足

否则,必然有

在目标识别过程中,特征空间优化的目的是用最少的描述获得目标形状上最“本质”的特征。通过每个基准角点到重心点G的距离,可以定义出一个区分度较高的描述子:
如图7-4所示,用SUSAN算法检测出了F16战斗机图像的所有角点,并按照上述方法获得了四个基准角点,从而构造出了特征描述子S。
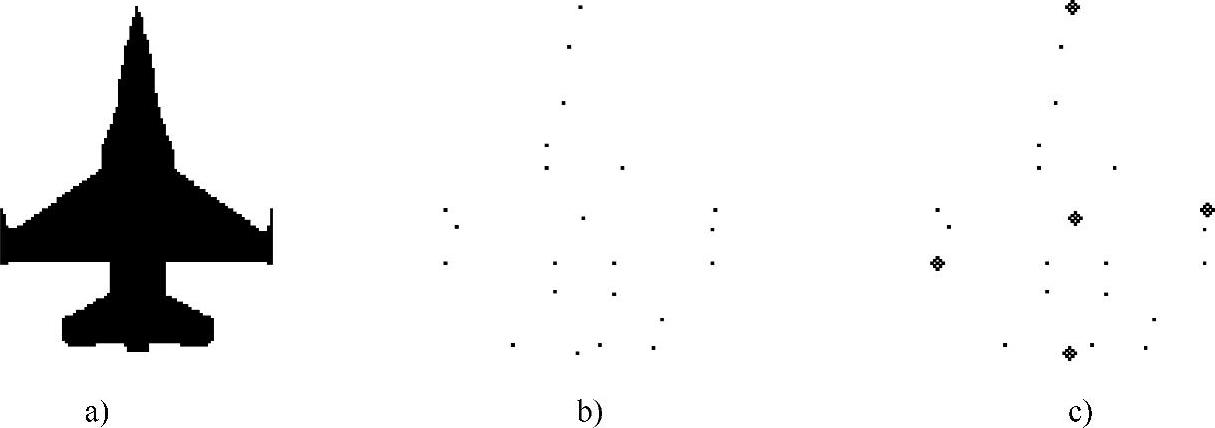
图7-4 飞机图像的基准角点提取
a)F16战斗机 b)角点(SUSAN) c)4个基准角点
相关文章

在轴承实际使用中,如果作用于轴承上的载荷小于上述各公式估算出的Frmin或Famin,则为了防止轻载打滑,必须对轴承进行预紧。表2-63 最小轴向载荷系数Ka[1]通过滚动体中心与轴承轴线垂直的平面称为轴承的径向平面。包含轴承中心线的平面称为轴向平面。[3]式中对点接触所以取ε=3而对线接触:,,ε=4但是因为滚子轴承的接触形式很多,既有点接触,又有线接触,为统一滚子轴承的寿命计算方法,取ε=。......
2025-09-29
最常用的方法是用下式并考虑同特征一起使用的权值规范化:sj=uj-fij (3-3)如果Sk是最高相似度值,则标记物体为k类。因此,物体识别问题可以认为是图形匹配问题。在目标识别的多数应用中,待识别的物体可能是部分可见的。......
2025-09-29

Step2.创建图8.8.4所示的基准平面DTM1。单击“创建草绘基准曲线”按钮;选取DTM1基准平面为草绘平面,RIGHT基准平面为草绘平面的参考平面,参考方位是;绘制如图8.8.6所示截面草图。单击工具栏上的“创建基准平面”按钮;选取TOP基准平面为参照平面,偏移值为5.0。按住Ctrl键,选择RIGHT基准平面;单击“基准轴”对话框中的按钮Step7.创建图8.8.11所示的基准平面DTM3。......
2025-09-29

对目标进行匹配识别,需要选用合适的相似度比较函数,这个函数可以称之为相似度度量。相似度度量具有特征依赖性,不同的特征应该采用不同的度量方法获得最佳的测度效果。由于局部特征是采用模式向量的方式描述的,计算两个特征向量之间的距离是它们相似度的一种很好的度量。二次型距离考虑到特征分量之间的相关性,但是对称矩阵的计算量较大。......
2025-09-29

③球坐标系为r、theta和phi。2)执行选项卡下拉列表中的命令,系统弹出如图2-41所示控制板,单击选择坐标系类型为并选取界面中的坐标系。图2-41控制板3)单击控制板中的按钮,系统会弹出对话框,输入椭圆线的参数方程“x=10*cosy=6*sinz=0”,如图2-42所示。图2-42 输入参数方程4)单击按钮,并单击控制板中的按钮,完成通过方程创建椭圆特征。表2-1 函数方程注:不能在定义基准曲线的方程中使用下列语句:abs、ceil、floor、else、extract、if、endif和search。......
2025-09-29

电池的选型主要考虑所选电动机及转子发动机的相关参数。表8.4电池性能比较图8.15各种电池寿命曲线在高功率电池中,锂离子电池也是考虑的应用对象。表8.4电池性能比较2.参数计算在启动系中,启动发电一体化电动机功率相对较小,因此对应的镍氢电池容量应小一些。镍氢电池单体的放电内阻值约为0.002 4Ω,由上式可以计算出电池组额定电压为32V,电池个数为28个。......
2025-09-29
曲线点是曲线上显示的点,如图8-33所示,可以根据需要手动更改其位置;控制点是在单击按钮之后曲线上显示的点,如图8-34所示,拖动控制点同样也可以调整曲线。2)单击选项卡组中的按钮,打开控制板。3)单击绘图区中的造型曲线,出现如图8-37所示的曲线点,单击右侧曲线点并按下Ctrl+Alt组合键拖动,使其沿水平方向移动,形成如图8-38所示特征。图8-39 延伸曲线图8-40 曲线点编辑......
2025-09-29

如图8.3.10所示,直接拖移图中ISDX曲线上的某个端点或者某个内部点,便可直接调整曲线的外形。图8.3.15 拖移ISDX曲线上的软点图8.3.16 快捷菜单图8.3.17 操控板 长度比例将参考曲线(线段)长度视为1,通过输入长度比例值来控制软点位置。图8.3.22 锁定到点 链接与断开链接当ISDX曲线某一点为软点或固定点时,则该点表现为一种“链接”状态,如点落在曲面、曲线或某基准点上等。......
2025-09-29
相关推荐