基于电流的连续性,电路中任意一点都不会有电荷的堆积,由此得出基尔霍夫电流定律,其英文缩写为KCL。基尔霍夫电流定律适用于电路的节点,是对节点电流的约束。KCL的表达式为整理式,可得KCL的另一种形式为式表示,在任意时刻,电路中任意一个节点电流的代数和等于零。在如图1.4.2所示的电路中,已知I1=3 A,I2=-5 A,求I3。解对ABCA闭合面应用KCL,则对节点B应用KCL,则图1.4.2例1.4.1的图图1.4.3例1.4.2的图......
2025-09-29
一幅图像往往可以提取出超过2000个局部特征,而这些局部特征很可能来自场景中的多个物体或背景。如何从这些特征中寻找到只属于待识别目标的局部特征子集,这是进行目标匹配识别所必须解决的问题。霍夫变换(Hough Transform)为此提供了一条高效的途径。
基本的霍夫变换最初是用来进行直线检测的,而广义霍夫变换则可以在所需检测的曲线或目标轮廓没有或不易用解析表达式时,利用表格来建立曲线或轮廓点与参考点间的关系,进而检测出目标[67]。霍夫变换的基本思想是将原图像变换到参数空间,用大多数边界点满足某种参数形式来描述图像中的线,通过设置累加器进行累积,求得峰值对应的点所需要的信息。霍夫变换以其对局部缺损的不敏感,对随机噪声具有鲁棒性以及适于并行处理等优良特性,备受图像处理、模式识别和计算机视觉领域学者的青睐。霍夫变换的突出优点就是可以将图像中较为困难的全局检测问题转换为参数空间中相对容易解决的局部峰值检测问题。
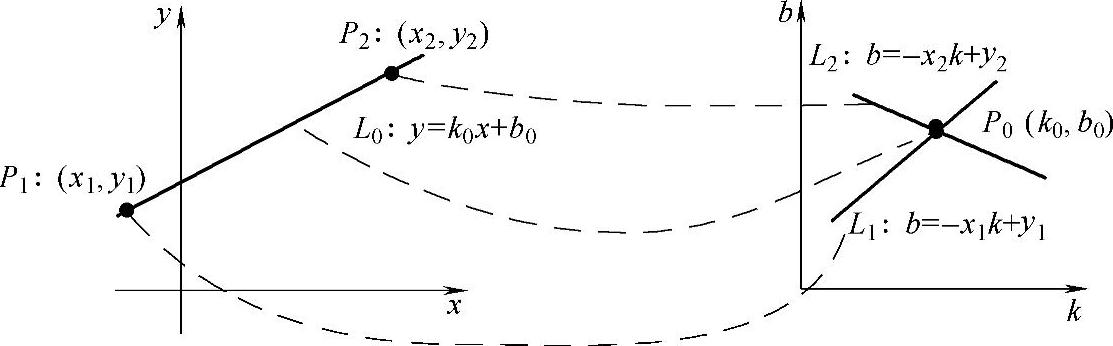
图5-3 直线检测中的霍夫变换
霍夫变换利用点线对偶性原理进行坐标变换,原理如图5-3所示,在直角坐标系下,利用公式(5-2)表示过点(x,y)的直线L0的方程:
y=k0x+b0 (5-2)
式中,k0为斜率;b0为截距。将其变换为参数空间中过点(k0,b0)的直线方程:
b0=-xk0+y (5-3)(https://www.chuimin.cn)
可以看出,直线L0上的两个点(x1,y1)和(x2,y2),在参数空间中表示为两条直线不同的直线L1和L2,而它们在参数空间中相交于(k0,b0)点。也就是说,原图像空间中同一条直线上的不同点在参数空间中被变换为一组相交于同一点的直线。
使用公式(5-2)表示一条直线带来的一个问题是,当直线接近垂直时,直线的斜率接近无限大。解决这一难点的一种方法是使用极坐标方程来表示直线:
ρ=xcosθ+ysinθ (5-4)其中ρ为原点到直线的距离(即原点到直线的垂直线的长度),θ确定了直线的方向(即原点到直线的垂直线与x轴方向的夹角)。如果对位于同一直线上的n个点进行霍夫变换,则原图像空间中的这n个点在参数空间中对应得到n条正弦曲线,并且这些曲线相交于同一点了,若能确定参数空间中的P0点(局部最大值),也就实现了直线的检测。
本书对目标姿态建立一个参数空间,将目标的2D坐标、尺度、方向参数等坐标轴按照一定的步长划分为若干等份;然后将所有匹配的特征点向这个参数空间投票;对参数空间每个点的投票累加值进行分析,累加值大的点所对应的目标姿态有更高的概率出现在图像中。在实际应用中,对于参数空间坐标轴步长,一般2D坐标为训练集中目标最大尺寸的0.25倍,尺度因子为2,方向参数为30°。累加值和预设的阈值进行比较,当大于阈值时,则判定该点所对应的目标姿态存在于图像中。
在图5-4中,左图所示的两个目标——玩具火车和玩具青蛙,由于其他物体(包和箱子等)的存在,在中间的图像里都产生了局部遮挡,而采用上述的目标匹配方法都可以将这些目标识别出来,识别效果图如右图所示。大的矩形框中是识别出的目标,小的矩形框代表识别所用到的局部特征。
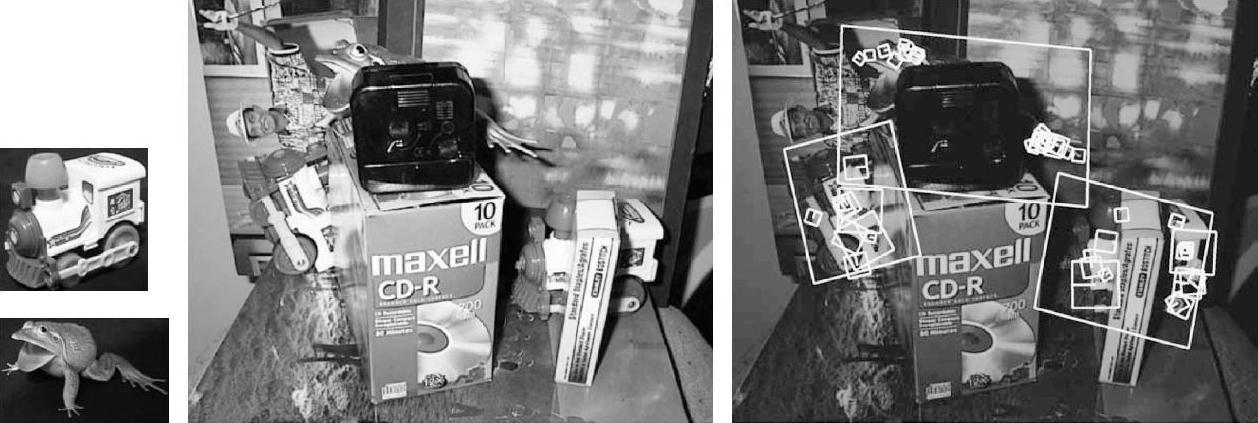
图5-4 局部遮挡目标检测(来源:Lowe,2025年)
相关文章

基于电流的连续性,电路中任意一点都不会有电荷的堆积,由此得出基尔霍夫电流定律,其英文缩写为KCL。基尔霍夫电流定律适用于电路的节点,是对节点电流的约束。KCL的表达式为整理式,可得KCL的另一种形式为式表示,在任意时刻,电路中任意一个节点电流的代数和等于零。在如图1.4.2所示的电路中,已知I1=3 A,I2=-5 A,求I3。解对ABCA闭合面应用KCL,则对节点B应用KCL,则图1.4.2例1.4.1的图图1.4.3例1.4.2的图......
2025-09-29

由第5章内容可知,二维DCT运算可以转化成DFT运算,然后取结果的实部作为DCT变换的结果。DCT基可以设计任何大小的内插模板,而不限于2的整数次幂。以上面傅里叶基构造的结果直接得到DCT基滤波器H和对应的非重叠模板。图8-1c对应的定制H1/3如下,其反变换即为非重叠模板T1/3。......
2025-09-29
验证基尔霍夫电流、电压定律,巩固有关的理论知识。选择实验原理箱上的电阻或实验室其他电阻作为待测电阻,欧姆档的量程应根据待测电阻的数值合理选取。根据测量数据验证KCL和KVL,并分析误差原因。......
2025-09-29

由于半导体制造系统属于典型的Np-hard 问题, 传统的运筹学方法会带来繁杂的数据运算从而很难进行优化, 在实际应用中通常是寻求计算效率高、 优化效果较好的启发式算法, 本书给出求解该目标函数的一种启发式优化算法, 具体启发式算法流程图如图4-5 所示, 其步骤如下:Step 1: CCij信息初始化,t =0;Step 2: Dik需求招标值下达,wi 权重系数给定( i =1, 2, …......
2025-09-29

V1为电压传感器,用于检测光伏电池板输出电压。图7-9 定/变步长电导增量法MPPT功率跟踪效果对比图通过对不同MPPT算法的仿真,可以看到几种算法在进行最大功率追踪时的效果差异。这里的MPPT_mohu系统函数主要用于计算E=dP/dU和图7-10 基于模糊算法的MPPTSimulink仿真模型dE。......
2025-09-29

直线投影法是一种基于边界的角点检测算法,其核心思想就是把角点定义在目标的轮廓线上,先分割图像,抽取目标边界的Freeman链码,将方向改变程度较大的点标记为角点。设L为目标区域边界,其局部连续链码可表示为Ljs={aj-s+1 aj-s+2…Ljs在x和y方向的投影,即在链码7和1的方向的投影为式中,ai7,ai1的值由方向码ai的值确定,见表4-1。......
2025-09-29

设某一属性的所有值的数据集为S,其平均值为Smean。根据这些想法,提出一种基于聚类的全局特异数据挖掘方法。构架仍由挖掘特异属性和挖掘特异记录两个层次构成。从原则上讲可以采用任何基于距离的聚类算法对S进行聚类,采用的聚类算法的效果好,可以减少后续的计算量。图3.2SimC聚类算法可以看出,k是控制聚类半径Cd的。现在根据式(3.9)计算每个类的特异因子,记为CPF。显然,CPF越小的类,其中的元素是特异数据的可能性越小。......
2025-09-29
为寻找更为理想的基窗函数,借助LMS算法思想提出了“基于LMS准则以apSW为模型的基窗函数设计方法”。图3-21 余弦基神经自适应网络图3-21 余弦基神经自适应网络图3-22 apSW基窗LMS设计算法按照流程图,设计截止频率为π/4的32阶低通apSW的窗函数F。......
2025-09-29
相关推荐