针对这种情况,本节提出了使用加权重叠滤波的思想以克服上述缺点,以改进传统变换域自适应算法的收敛性能。令Et x=z,采用同普通LMS自适应滤波器相类似的方法可得WO-TLMS自适应滤波器权矢量的维纳解wopt和相应的最小均方误差εmin分别为式中,E t=QET=QOW。WO-TLMS中加权重叠矩阵对自适应算法的改善效果与WO-LMS一样,但采用不同的正交变换对系统性能的改善程度也会不同。......
2025-09-29
Smith和Brady[171]提出的SUSAN算法是一种应用广泛的基于图像灰度变化的方法,随后出现的MIC算法[172]等都是它的思想的改进和发展。该算法使用一个可调节大小的圆形模板,模板内的每一像素点灰度值与中心像素点灰度值比较,灰度值与中心像素点相近的点组成的区域,称为USAN(Univalue Segment Assimilating Nucleus)区域。SUSAN算法就是根据各个待考察点的USAN区域面积来判断当前点是区域内部点、边界点还是角点。
1.基于SUSAN算法的角点检测
如图4-7所示,a点模板处于背景中,整个模板都属于USAN区域;b点有超过一半的像素点属于USAN区域;c点模板内有一半像素点属于USAN区域;d点有少于一半的像素点属于USAN区域。可见,如果待考察的像素点是角点,USAN区域的面积最小。
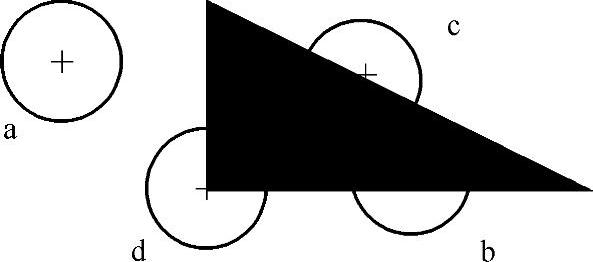
图4-7 USAN区域图解
图4-8所示为SUSAN算法的三种近似圆形模板,在实际应用中,37邻域的7×7模板最为常用。
SUSAN算法的数学描述为:使用近似圆形的模板(窗口)在图像上滑动,在每一个位置考察当前像素点的USAN区域面积。具体方法是比较窗口内的每一个点与中心点的灰度值差异:

为了得到更好的稳定性和有效性,可以用下面的判别函数:

式中, 是当前像素点(中心点)的位置,
是当前像素点(中心点)的位置, 是圆形窗口内其他任意一点的位置,I(
是圆形窗口内其他任意一点的位置,I( →)表示
→)表示 点的图像灰度值。t则是预设的灰度差阈值,理论和实践都证明,一般指数为6时t取25效果最好。
点的图像灰度值。t则是预设的灰度差阈值,理论和实践都证明,一般指数为6时t取25效果最好。
计算以 为中心像素点的模板内USAN区域大小的公式表示如下:
为中心像素点的模板内USAN区域大小的公式表示如下:

接着,将n( )与预先给定的几何阈值g进行比较,可以得到图像的初始角点响应:
)与预先给定的几何阈值g进行比较,可以得到图像的初始角点响应:
 (https://www.chuimin.cn)
(https://www.chuimin.cn)
R( )为反应函数,经过局部非极大值抑制NMS(Non-maximum Suppression)之后确立为角点。因为在角点的一个邻域内往往不止一个点的R(
)为反应函数,经过局部非极大值抑制NMS(Non-maximum Suppression)之后确立为角点。因为在角点的一个邻域内往往不止一个点的R( )值大于零,只有R(
)值大于零,只有R( )值最大的点才被确立为角点。
)值最大的点才被确立为角点。
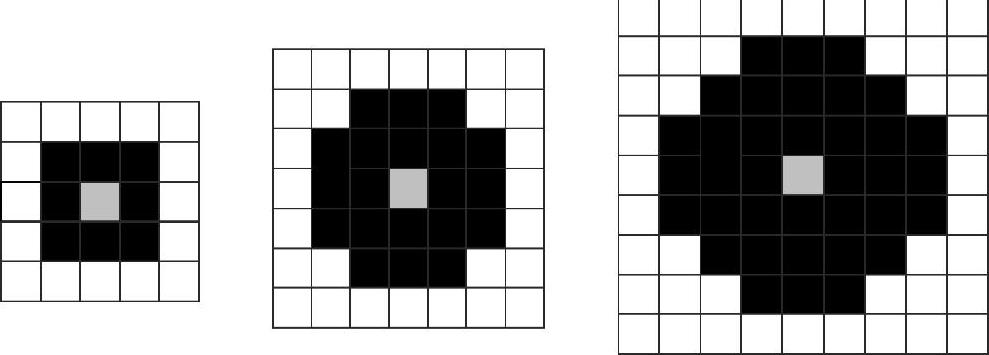
图4-8 SUSAN算法的模板
SUSAN算法的优点是在角点检测时不需计算梯度,不需插值且不依赖于前期图像分割的结果,直接对像素的邻域灰度值比较即可检测出角点,速度比较快,有一定的抗噪声干扰能力。但是采用预设的固定阈值限制了该算法的适用范围,需要对其做相应的改进,使得它可以根据具体情况自适应地调整阈值。
2.灰度阈值的自适应计算
在SUSAN算法中,几何阈值g和灰度阈值t的作用比较重要。几何阈值g决定了提取的角点的尖锐程度,g越小提取的角点越尖锐。在用SUSAN算法进行边缘提取的时候通常取g=3/4nmax,进行角点提取的时候,则取g=1/2nmax。
一般而言,对于g不需要通过调整就能取得较好的效果。灰度差阈值t决定了SUSAN算子所能检测到的最小的对比度以及去除噪声点的能力。t越小,检测到的角点就越少,有可能漏检。t越大,所能检测到的角点就越多,但有可能误检。因此,如果对于灰度细节比较丰富的图像使用统一的灰度差阈值t,检测效果会不好。所以,需要有针对性地给出一种对t值的自适应的提取方法。
对于每个像素点的SUSAN模板,通过计算模板内每个像素点与中心点的灰度差得到该模板的灰度差直方图,然后根据灰度差直方图通过迭代法确定该模板的阈值t,使得对于不同的对比度的图像都能够自适应的计算出每个模板内适合的t值。
首先计算模板中每点与中心点的灰度差阈值,然后取灰度差值的均值为迭代初始值t0,如下式:

然后根据迭代初值将灰度差直方图分为两部分,进行迭代计算:
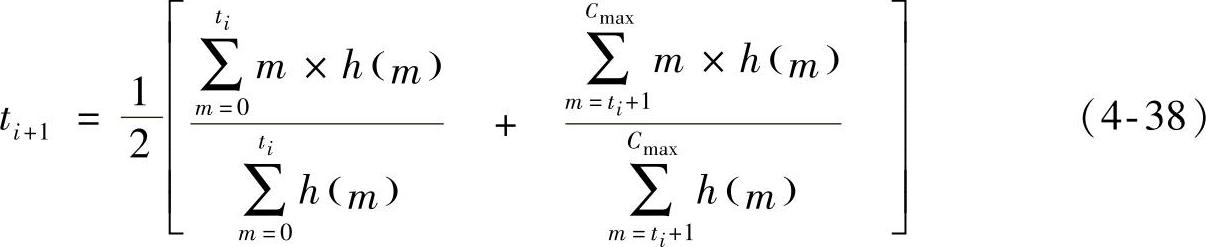
式中m为模板中像素点和中心像素点的灰度差值,h (m)为模板中具有该灰度差值的点的数量,Cmax为灰度差值的最大值,迭代终止的条件是ti+1-ti=0。
因为每个模板的t是根据模板内的灰度差值确定的,因此能够很好地检测到不同灰度对比度下的灰度变化,使得USAN区域的判断更加准确。
相关文章

针对这种情况,本节提出了使用加权重叠滤波的思想以克服上述缺点,以改进传统变换域自适应算法的收敛性能。令Et x=z,采用同普通LMS自适应滤波器相类似的方法可得WO-TLMS自适应滤波器权矢量的维纳解wopt和相应的最小均方误差εmin分别为式中,E t=QET=QOW。WO-TLMS中加权重叠矩阵对自适应算法的改善效果与WO-LMS一样,但采用不同的正交变换对系统性能的改善程度也会不同。......
2025-09-29

图9-11为一个自适应辨识原理图。图9-12a是8阶自适应滤波器的WO-LMS和LMS算法50次实验的输入自相关分散程度曲线。从图中可见WO-LMS算法比LMS算法有较高的收敛性能,且改善程度随滤波器阶数增加而增大。所以,LMS算法收敛时,自适应滤波器的滤波系数等于被辨识的权矢量。图9-12 WO-LMS和LMS算法输入自相关矩阵的分散比较下面将给出在不同步长时,WO-LMS算法响应收敛曲线和LMS算法收敛曲线的比较。......
2025-09-29
聚类分析发现强相关的对象组,而特异检测发现不与其他对象强相关的对象。图3.8K-means聚类方法与CpecuFind发现特异数据能力ROC曲线K-means聚类;CpecuFind表3.6K-means与CpecuFind发现特异数据能力ROC曲线面积对比上述对比说明,只简单地以簇类大小和对象与类心距离来评估对象的特异程度结果很粗糙,其评价特异数据的能力远不如Cpecu Find方法。......
2025-09-29

在所有可能的项集中,有很多候选都不是频繁的。算法4.2Apriori算法伪代码FPGrowth方法使用一种增强的前缀树对数据D进行索引,以实现快速的支持度计算。FPGrowth将所有的项按照支持度的降序排列。FP树构建完成后,所有的频繁项集就可以从树中挖掘出来。基于频繁树模式的频繁集搜索方法见算法4.3。算法4.3FPGrowth算法伪代码......
2025-09-29
直接法估计出的谱的方差特性不好,当数据长度N太大时,谱曲线起伏加剧,N太小时,谱峰的分辨率又不好,因此需要加以改进。上面3种改进方法可归纳为图6-3。图6-3 3种改进方法的框图古典谱估计,不论是间接法还是直接法,都可用FFT快速实现,且物理概念明确,因而仍是目前较常用的谱估计方法。实现上述直接法、间接法和三种改进的直接法谱分析的M......
2025-09-29

质量运输空化模型采用不同的凝结项经验系数Ccond和蒸发项经验系数Cvapo控制质量和动量的交换。如图2.5所示,基于Zwart-Gerber-Belamri空化模型的离心泵空化流动数值计算结果与试验结果相差较大。为分析凝结项经验系数对泵空化流动数值计算的影响,在质量输运空化模型中默认值Ccond=0.01的基础上,凝结项经验系数分别取为0.001、0.000 1、0.000 01、0.000 001、0.000 000 1,对离心泵的两种工况Q=19.80 m3/h和Q=25.33 m3/h下的空化流动进行定常数值计算。继续降低Ccond至0.000 1时,扬程曲线变化较明显。......
2025-09-29
为了有效地发挥RWFS在频谱资源调配上的优势,本小节提出了一种面向RoF光网络域传输的灵活RWFA算法,该算法的伪代码如图5-14所示。当不存在已建立的可用光路或无线频谱资源已被占用的情况时,则进行路由波长频谱分配,为该业务请求搭建光路。在RWFA算法中,需要计算WFS来判断是否启用RWFS来进行高灵活性的频谱调配。当WFS小于阈值时启用普通的RSA算法,当WFS大于阈值时则继续执行RWFA算法。......
2025-09-29
对于双窗系统,EN不再恒等于1,但具有“倒余弦”形状,这样W-O分析谱中在每点都产生旁瓣。同古典谱估计方法相比,由于AR模型是一个有理分式,因而估计出的谱比古典谱估计法估计出的谱平滑。由式易知,X0在k=0时的权值为N,即阶数越高,W-O谱线分辨力越强。图6-9 传统信号加窗与W-O谱分析由图6-9可以看出,用W-O方法得到的信号频谱比用传统加窗方法具有更少、更低的旁瓣干扰。......
2025-09-29
相关推荐