DDT和HCH是历史上我国农业使用量最大的两种主要有机氯农药,也是本文着重研究和讨论的目标。漓江两个沉积柱中OCPs、HCHs和DDTs含量分布见图1。与这些沉积物柱芯样品相比,漓江沉积物柱芯样品有机氯农药污染程度高于珠江澳门河口和西藏羊卓雍湖,与太湖沉积物持平,低于洪湖沉积物柱芯。......
2025-09-29
Lowe提出的SIFT描述子对后来的许多基于梯度分布的特征描述子都产生了深远的影响。例如,GH和SC描述子的主要思想就和SIFT描述子类似,只是它们描述的是区域内边缘的分布,主要应用于边缘特征比较明显、稳定的图像;PCA-SIFT和GLOH描述子都是对SIFT描述子的扩展,它们在区域和梯度方向上采用了不同的描述精度,并用主分量分析对特征向量进行降维处理,进一步增强了描述子的鲁棒性和区分度。
为了使描述子具有旋转不变性,需要为每一个特征点指定一个方向,从而让局部特征描述子与这个方向因子相关。计算特征点邻域的梯度模值以及梯度方向的公式如下:

式中,L为每个特征点各自所在的尺度。在以特征点为中心的邻域窗口内计算像素的梯度方向直方图,直方图的范围是0°~360°,以10°为一个步长,共分为36个方向。如图4-5所示,在计算过程中需要一个的高斯权重窗(左图中的圆形),中心处的权值最大,边缘处的权值最小,右图给出了8个方向的直方图示例(实际应用中常采用36个方向)。
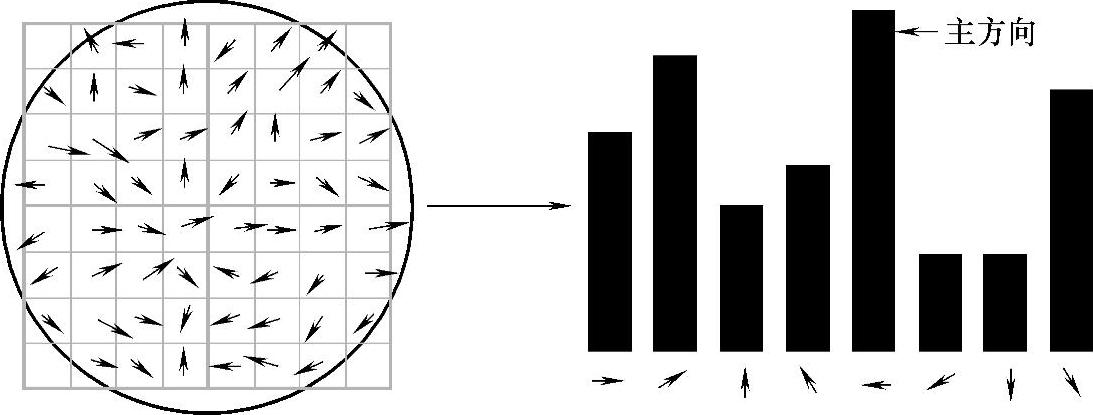
图4-5 由梯度方向直方图确定主梯度方向
为了增强匹配的稳定性,以梯度方向直方图的最大值作为该特征点的主方向,并选择大于主方向峰值80%的方向作为辅方向。虽然在相同位置和尺度可能创建多个特征点但方向不同,且15%的特征点被赋予多个方向,这明显提高了特征点的区分性。(https://www.chuimin.cn)
如图4-6所示,每一个特征点都携带了三种信息——位置、尺度和方向,由此可以确定一个SIFT特征区域,可以将坐标轴旋转为特征点的方向,进而构造出独特性较高的特征描述子,且具有不受尺度、光照、视角变化影响的性质。左图中矩形的中心点表示当前特征点的位置,小箭头的长度代表梯度的幅值,箭头的方向表示梯度的方向。圆形的高斯窗(越靠近中心点,贡献越大)尽量减小那些远离特征区域中心的梯度值影响,这样就避免了微小变化引起的描述子突变。
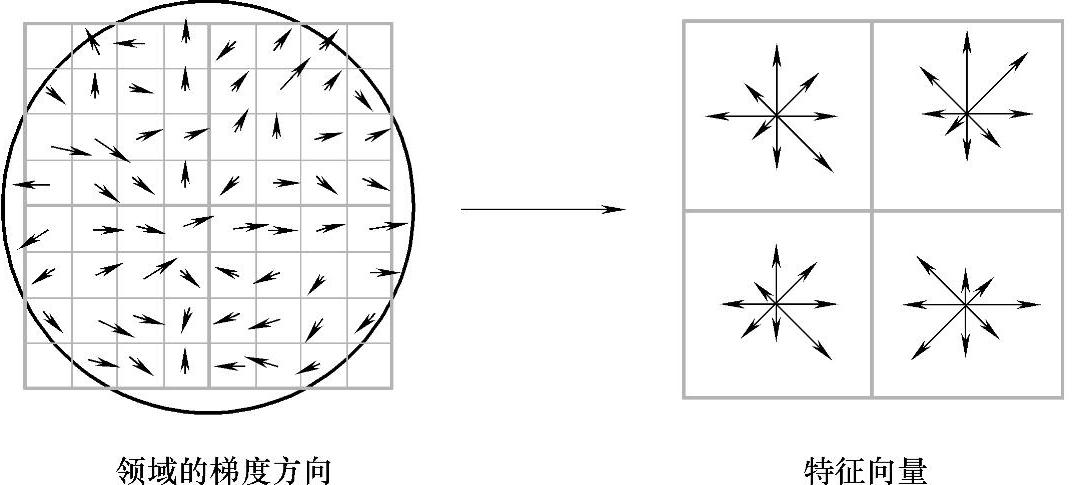
图4-6 由邻域梯度信息生成特征向量
图4-6的右图所示的描述符是基于一个2×2个梯度方向直方图,Lowe建议在实际应用中采用16个直方图进行描述效果最好。即以特征点为中心取16×16像素大小的邻域,将此邻域分为16个大小为4×4个像素的子区域,对每个子区域计算8方向的梯度方向直方图。根据子区域位置对相应的梯度方向直方图排序,就构成了一个4×4×8=128维的SIFT特征向量。如此一来,该特征描述子就消除了尺度变化、旋转变化等因素的影响,通过向量的长度归一化可以进一步消除光照变化的影响。
GLOH描述子是对SIFT描述思想的改进和发展,首先利用邻域像素的梯度方向分布为每个特征点指定方向参数,并将坐标轴旋转为该方向,以确保旋转不变性。然后在特征点所处的尺度空间(即高斯金字塔的某一层),取其周围的16像素16像素大小的邻域,用17层放射状同心圆来表示,并对每个子区域计算梯度方向直方图(梯度方向分为16种)。对17个子区域的16方向梯度直方图根据位置依次排序,这样就得到一个17×16=272维的向量。通过主分量分析(Principal Component Analysis,PCA)进行降维,最终得到一个128维的向量,在最大程度保留原始数据的同时大大减少了后续应用的计算时间。
基于梯度分布的特征描述子都可以较稳健的对发生几何形变、退化、受噪声干扰的图像局部特征进行准确的匹配。而且由于这些特征描述子在计算关键点方向时充分利用了邻域信息,这样在一定程度上可以避免在小运动物体上匹配特征点,因为小运动物体的邻域信息即使去除了尺度和旋转的因素后也仅是具备较少的梯度方向相似性;同时这些特征描述子在计算关键点处的梯度方向时都使用了直方图统计和高斯加权的思想,这就对存在定位偏差的特征点匹配提供了更好的适应性。
相关文章

DDT和HCH是历史上我国农业使用量最大的两种主要有机氯农药,也是本文着重研究和讨论的目标。漓江两个沉积柱中OCPs、HCHs和DDTs含量分布见图1。与这些沉积物柱芯样品相比,漓江沉积物柱芯样品有机氯农药污染程度高于珠江澳门河口和西藏羊卓雍湖,与太湖沉积物持平,低于洪湖沉积物柱芯。......
2025-09-29

朴素贝叶斯分类器进行目标分类的基本思想是利用特征项和类别的联合概率来估计给定目标的类别概率。理论上,朴素贝叶斯分类器与其他分类方法相比具有最小的误差率。但是该模型在分类识别中假设特征项之间相互独立,而这个假设在实际应用中往往是不成立的,这给朴素贝叶斯分类器的正确分类带来了一定影响。因此,近年来大量的研究工作致力于改进朴素贝叶斯分类器,主要集中在选择特征子集和放松独立性假设在两个方面。......
2025-09-29

图9-26为具有简单网络拓扑的C-RoFN中的RIP方案的例子,该方案包含3个天线、5个光开关和一个PU。根据资源的请求和状态,可以提供合适的MP作为基于该方案的路径供应。表9-3符号和定义在这项研究中,我们提出了一个辅助图,根据其边缘权重实现了RIP方案。......
2025-09-29

为了提升防御窃听攻击能力并保障CIS信息安全,人们提出了一种基于可实现业务流切片与并行计算的MFVC的安全策略。采用基于MFVC的安全策略能有效地排除这一安全隐患,图8-4和图8-4分别展示了这一安全策略的过程与优势。因此,这种基于MFVC的安全策略可以同时增加安全性与频谱效率。图8-4一般传输模式与安全策略的对比在所提出的安全策略中,由于CIS的传输模式变成了并行传输,所以计算EP值的公式不再适用于对业务被窃听概率的评估。......
2025-09-29
利用ap系统进行滤波的关键是频率采样序列H的设置,ap系统具有严格零相位,所以只需对H设置就可以过滤出期望的信号而保持原有的相位信息。由于没有旁瓣,该信号可被无失真滤出。由图2-41中分别按照ap系统和传统方法恢复信号结果对比可看出,ap结果明显克服了传统方法分段带来的间断问题。图2-40 不同s时旁瓣幅值及偏离方差在上面分析的基础上,我们通过一个实例来验证了ap滤波的优良性能。......
2025-09-29

由于半导体制造系统属于典型的Np-hard 问题, 传统的运筹学方法会带来繁杂的数据运算从而很难进行优化, 在实际应用中通常是寻求计算效率高、 优化效果较好的启发式算法, 本书给出求解该目标函数的一种启发式优化算法, 具体启发式算法流程图如图4-5 所示, 其步骤如下:Step 1: CCij信息初始化,t =0;Step 2: Dik需求招标值下达,wi 权重系数给定( i =1, 2, …......
2025-09-29

从动单元 由于它们的速度随时由同步系统协调,故对机械特性的硬度要求不很高,可选用V/F控制方式的变频器。1单元 由于采用了具有无反馈矢量控制功能的变频器,故在fX=24.6Hz时,ξL=1,所以电动机功率可以和原选直流电动机的功率相同。变频器的容量主要取决于电动机的过载情况。......
2025-09-29
相关推荐