S7-200的普通计数器有3种类型:递增计数器CTU、递减计数器CTD和增减计数器CTUD,共计256个,编号为C0~C255。依据设定值及计数器类型决定动作时刻,以便完成计数控制任务。计数器指令的LAD和STL格式见表1-5。当复位输入端为ON或对计数器执行复位指令,计数器自动复位,即计数器位为OFF,当前值为设定值。......
2023-06-26
PLC的通信包括PLC之间、PLC与上位计算机之间以及PLC与其他智能设备之间的通信。PLC与计算机可以直接或通过通信处理单元、通信转换器相连构成网络,以实现信息的交换。
1.S7-200的网络通信协议
在进行网络通信时,通信双方必须遵守约定的规程,这些为交换信息而建立的规程称为通信协议。
S7-200系列的PLC主要用于现场控制,在主站和从站之间的通信可以采用3个标准化协议和1个自由口协议:①PPI(Point to Point Interface)协议,也就是点对点接口协议;②MPI(Multi Point Interface)协议,也就是多点接口协议;③PROFIBUS协议,用于分布式I/O设备的高速通信;④用户定义的协议,也就是自由口协议。
其中,PPI协议是SIEMENS公司专为S7-200系列PLC开发的通信协议,是主/从协议,利用PC/PPI电缆,将S7-200系列的PLC与装有STEP 7-Micro/WIN32编程软件的计算机连接起来,组成PC/PPI(单主站)的主/从网络连接。
本节中只介绍PPI协议。
网络中的S7-200 CPU均为从站,其他CPU、编程器或人机界面HMI(如TD200文本显示器)为主站。
如果在用户程序中指定某个S7-200 CPU为PPI主站模式,则在RUN工作方式下,可以作为主站,它可以用相关的通信指令读写其他PLC中的数据;与此同时,它还可以作为从站响应来自于其他主站的通信请求。
对于任何一个从站,PPI不限制与其通信的主站的数量,但是在网络中最多只能有32个主站。
2.通信设备
(1)通信端口
S7-200系列PLC中的CPU226型机有2个RS-485端口,外形为9针D型,分别定义为端口0和端口1,作为CPU的通信端口,通过专用电缆可与计算机或其他智能设备及PLC进行数据交换。
(2)网络连接器
网络连接器用于将多个设备连接到网络中。一种是连接器的两端只是个封闭的D型插头,可用于两台设备间的一对一通信;另一种是在连接器两端的插头上还设有敞开的插孔,可用来连接第三者,实现多设备通信。
(3)PC/PPI电缆
用此电缆连接PLC主机与计算机及其他通信设备,PLC主机侧是RS-485接口,计算机侧是RS-232接口。当数据从RS-232传送到RS-485时,PC/PPI电缆是发送模式,反之是接收模式。
3.通信指令
(1)PPI主站模式设定
在S7-200的特殊继电器SM中,SMB30(SMB130)是用于设定通信端口0(通信端口1)的通信方式。由SMB30(SMB130)的低2位决定通信端口0(通信端口1)的通信协议。只要将SMB30(SMB130)的低2位设置为2#10,就允许该PLC主机为PPI主站模式,可以执行网络读写指令。
(2)PPI主站模式的通信指令
S7-200 CPU提供网络读写指令,用于S7-200 CPU之间的联网通信。网络读写指令只能由在网络中充当主站的CPU执行,或者说只给主站编写读写指令,就可与其他从站通信了;从站CPU不必做通信编程,只需准备通信数据,让主站读写(取送)有效即可。
在S7-200的PPI主站模式下,网络通信指令有两条:NETR和NETW。
1)网络读指令NETR(Net Read)。
网络读指令通过指定的通信口(主站上0口或1口)从其他CPU中指定地址的数据区读取最多16字节的信息,存入本CPU中指定地址的数据区。
在指令(见图1-28)中,网络读指令以功能框形式编程,指令的名称为NETR。当允许输入EN有效时,初始化通信操作,通过指定的端口PORT,从远程设备接收数据,将数据表TBL所指定的远程设备区域中的数据读到本CPU中。TBL和PORT均为字节型,PORT为常数。
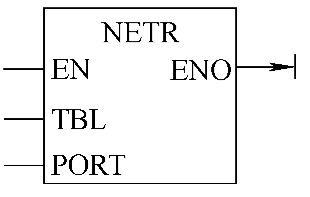
图1-28 NETR指令
PORT处的常数只能是0或1,如是0,就要将SMB30的低2位设置为2#10;如是1,就要将SMB130的低2位设置为2#10,这里要与通信端口的设置保持一致。
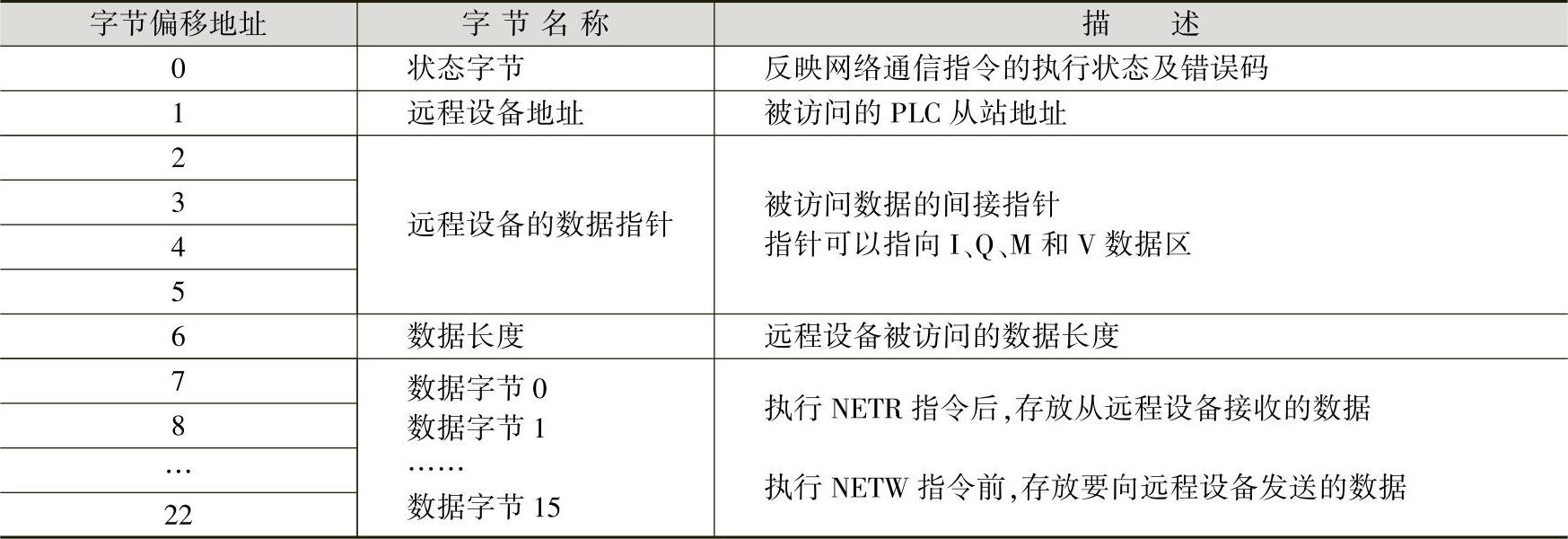
TBL处的字节是数据表的起始字节,可以由用户自己决定,但起始字节定好后,后面的字节就要接连使用,形成列表,每个字节都有自己的任务,见表1-27。NETR指令最多可以从远程设备上接收16字节的信息。
在语句表中,NETR指令的指令格式:NETR TBL,PORT。
2)网络写指令NETW(Net Write)。
表1-27 数据表(TBL)格式
网络写指令通过指定的通信口(主站上0口或1口),把本CPU中指定地址的数据区内容写到其他CPU中指定地址的数据区内,最多可以写16字节的信息。
在指令(见图1-29)中,网络写指令以功能框形式编程,指令的名称为NETW。当允许输入EN有效时,初始化通信操作,通过指定的端口PORT,将数据表TBL所指定的本CPU区域中的数据发送到远程设备中。TBL和PORT均为字节型,PORT为常数。数据表TBL见表1-27。NETW指令最多可以从远程设备上接收16字节的信息。
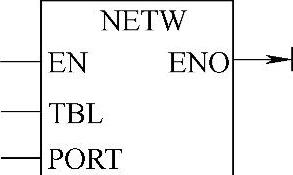
图1-29 NETW指令
在语句表中,NETW指令的指令格式:NETW TBL,PORT
在一个应用程序中,使用NETR和NETW指令的数量不受限制,但是不能同时激活8条以上的网络读写指令(例如,同时激活6条NETR和3条NETW指令)。
数据表TBL共有23个字节,表头(第一个字节)是状态字节,它反映网络通信指令的执行状态及错误码,各个位的意义如下:

D位:操作完成位。0—未完成,1—已经完成。
A位:操作排队有效位。0—无效,1—有效。
E位:错误标志位。0—无错误,1—有错误。
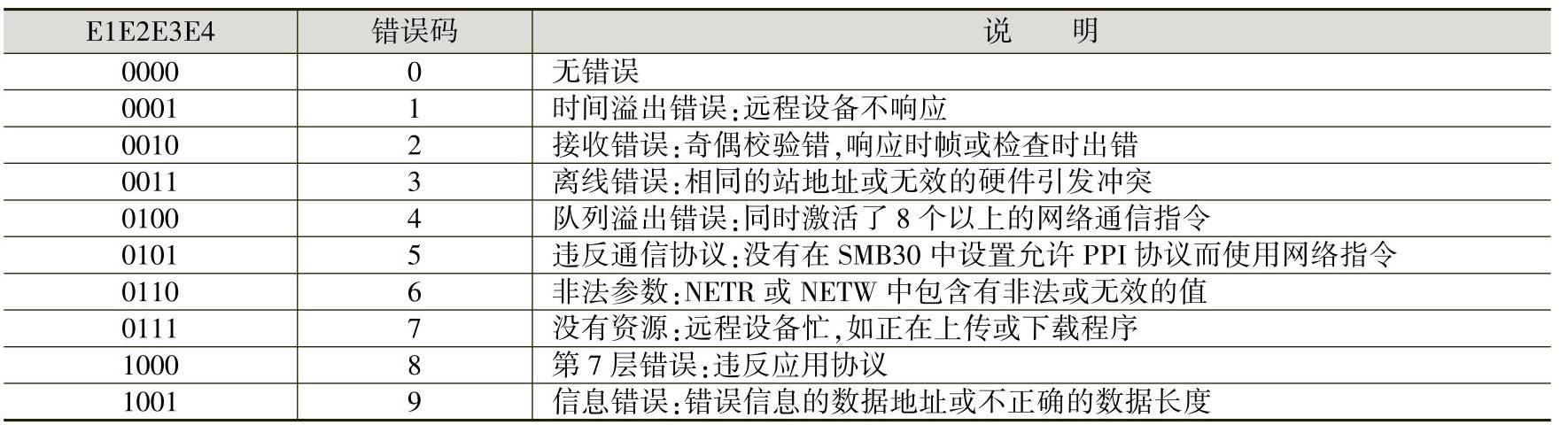
E1、E2、E3、E4为错误编码。如果执行指令后,E位为1,则由E1E2E3E4反映一个错误码。编码及说明见表1-28。
表1-28 错误编码

S7-200的普通计数器有3种类型:递增计数器CTU、递减计数器CTD和增减计数器CTUD,共计256个,编号为C0~C255。依据设定值及计数器类型决定动作时刻,以便完成计数控制任务。计数器指令的LAD和STL格式见表1-5。当复位输入端为ON或对计数器执行复位指令,计数器自动复位,即计数器位为OFF,当前值为设定值。......
2023-06-26

接近开关的状态又由装在刨台下部的四个接近块接近的情况所决定,如图10-9a所示。各接近开关在不同时序中的状态如图10-9b所示。图中,接近开关被撞后的状态为“1”;复位后的状态为“0”。......
2023-06-24

这个问题称为机器指令的寻址方式,本节我们详细地讨论机器指令的寻址方式问题。设X=011表示操作数为相对寻址方式。显然,变址寻址方式的地址变化范围更大。......
2023-11-18

三菱电机公司Q系列PLC的指令可以分为顺序指令、基本指令、应用指令和特殊指令四大类。本章主要以梯形图编程方式介绍为主。此外,本书将在第7章介绍其他的编程方式,如SFC、FB、ST语言。指令是构成程序的基本要素,多数CPU模块的指令包括指令名部分和操作数部分:所谓指令名部分是指用特定符号表示指令的功能;操作数部分又分为源操作数和目标操作数、软元件数和传送数。......
2023-06-15

移位和循环指令需要选择数据类型。3)如果要循环移位的位数超过目标值中的位数,仍将执行循环移位。编写程序如图5-32所示,其中I0.0为控制开关,M1.5为周期为1s的时钟存储器位,实现的功能为当按下I0.0,QD4中为1的输出位每秒钟向左移动1位。第1段程序的功能是赋初值,即将QD4中的Q7.0置位,第2段程序的功能是每秒钟QD4循环左移一位。......
2023-06-15
EtherCAT从站设备使用一个价格低廉的从站控制器芯片。EtherCAT协议扩展了IEEE 802.3以太网标准,使得数据传输中具有可预测性定时及高准确度同步等特点。EtherCAT协议标准帧结构如图9-21所示。表9-5 EtherCAT帧结构的含义表9-6 子报文结构参量含义EtherCAT的通信协议模型如图9-22所示。EtherCAT网络中组态数据或参数的传输是在一个确定的时间中通过一个专用的服务通道进行的。图9-23 EtherCAT子报文结构......
2023-08-29

表5-27 数据传送指令注:EDMOV指令仅适合QnU系列PLC。下面以16位数据传送指令MOV为例展开说明。图5-4 K155存储在数据寄存器D8中2)浮点数据传送EMOV指令是将源操作数中存储的浮点型实数数据传送至目标软元件中去。EMOV指令是单精度浮点数据,占32位,双精度指令占64位。4)相同16位数据批量传送指令FMOV的主要功能是将数据同时传送到指定软元件开始的n点位置。......
2023-06-16

字符串的第一个字符可以是有效数字或符号。表5-12 参数FORMAT的可能值及其含义3.VAL_STRG指令VAL_STRG指令将整数值、无符号整数值或浮点值转换为相应的字符串表示法。转换后的字符串将从字符偏移量计数P位置开始替换OUT字符串中的字符,一直到参数SIZE指定的字符数。如果参数P大于OUT字符串的当前大小,则会添加空格,一直到位置P,并将该结果附加到字符串末尾。如果达到了最大OUT字符串长度,则转换结束。表5-14 字符串操作指令......
2023-06-15
相关推荐