测量仪器仪表的测得值与被测量真值之间的差异,称为测量误差。为了表征测量的准确程度,常用相对误差的形式。例如5.0级表示满度相对误差的最大值不超过仪表量程上限的5%。解:0.5级温度计测量时可能出现的最大绝对误差、测量80 °C可能出现的最大实际相对误差分别为该温度计的满度相对误差介于1.0%与1.5%之间,因此该表的精度等级应等为1.5级。......
2023-06-22
这一标准主要用来规定轴承振动测量中的一般原则,如名词术语的定义、基本概念、轴承振动测量的程序、测量和评估方法、被测轴承状态、测试环境状态、标定和测量系统评估、接触共振等,下面将分别介绍各部分的详细内容。
4.1.1 名词术语和定义
下列名词术语适用此标准。
1.运动误差(error inotion)
转动轴线不期望的径向、轴向(平移)和倾斜(角向)运动,但不包括由于温度变化和外加载荷变化引起的运动。
2.刚度(stiffness)
一个弹性元件力(或力矩)的变化量与相应的平移(旋转)方向位移变化量的比值。
3.振动(vibration)
描述一个机械系统运动或位置的参数数值,交替大于或小于某一平均值或参考值时随时间而变化的变量。
4.传感器(transducer)
可以接收一个系统的能量并能以同样类型的能量或不同类型的能量输送到另一系统的装置,并能使输入能量的特征在输出端表现出来。
5.机电传感器(electromechanical pickup)
一种传感器,它能被机械系统的能量激励,(如应变、力、运动等能量),并把能量提供给电的系统,或者相反。
注:在振动和冲击测量中传感器主要类型有:
1)压电式加速度计。
2)压电电阻加速度计。
3)应变加速度计。
4)可变电阻传感器。
5)静电(电容)传感器。
6)耦合(箔片)应变传感器。
7)变磁阻传感器。
8)磁致伸缩传感器。
9)移动导体传感器。
10)动圈式传感器。
11)感应传感器。
6.位移(displacement)
描述一个物体或质点的位置相对于参考系变化的向量。
7.速度(velocity)
描述位移对时间进行微分的向量。
8.加速度(acceleration)
描述速度对时间微分的向量。
9.滤波器,波纹滤波器(filter、wave filter)
一种按振动频率把振动分离开的装置,它可以在一个或多个频带上使波度振动衰减相对较小,而在其他频带上使振动衰减相对较大。
10.带通滤波器(band-pass filter)
一种可以使单一振动频带传输通过的滤波器,从大于0的低截止频率到限定的上截止频率的振动可以传输通过。
11.通带(pass-band)
高截止频率与低截止频率之间的频率(带通滤波器的频率)。
12.名义高和低截止频率,截止频率(nominal upper and lower cut-off frequencise,cut-off frequency)
高于和低于一个滤波器最大响应的频率,在这些频率处,对正弦信号的响应低于最大响应3dB。
13.均方根(r.m.s)速度Vr.m.s(t)(root mean squar velocity)
在时间间隔t内,各时间段速度的平方值相加后取其平均值,然后再开方而得的速度值。
注:均方根值同样也可用于位移和加速度。
14.指数平均有效(e.m.e)速度Ve.m.e(t)(exponential mean effective velocity)
一种能得到时间——平均速度的参数,类似于均方根值速度,但是考虑了指数衰变。
注:
1)指数平均有效值也可用于位移和加速度。
2)指数平均有效值也可称为指数平均值,或时间衰减值。
15.周期(period)
一个循环变化参数的独立变量之最小增量,对此循环参数来说函数本身是重复的。
4.1.2 基本概念
1.轴承振动测量
图5-14的示意图说明了轴承振动测量的基本单元和影响振动测量的各种因素。
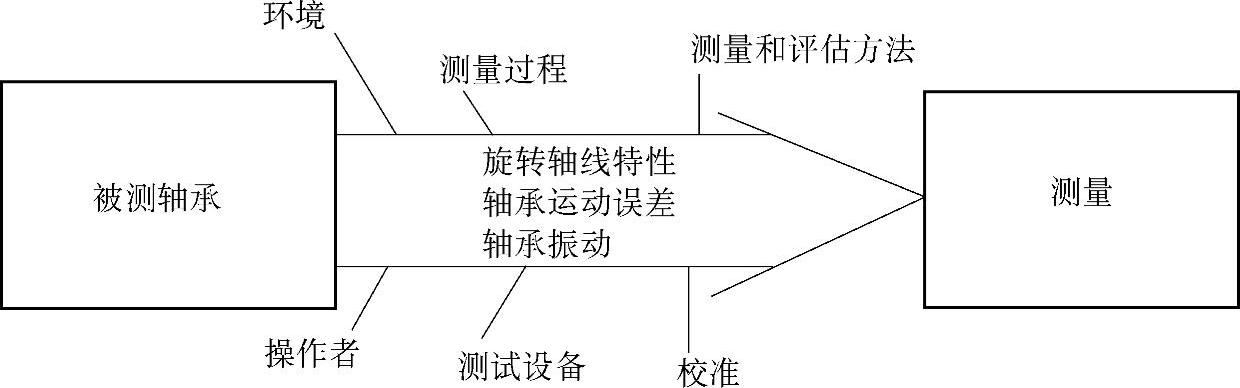
图5-14 轴承振动测量基本单元示意图
2.旋转轴线的特性
转动着的滚动轴承应是在一个机械元件相对于另一机械元件运动时提供一个转动轴线,并可承受径向和(或)轴向载荷。其转动轴线可有6个方向的自由度。图5-15给出了这6个自由度的简图。现列述如下:
1)旋转运动,如图5-15b所示。
2)在径向方向的平移运动,也就是通过转动轴线的一个或两个正交平面内的平移,如图5-15c和d所示。
3)在一个轴线方向的平移运动,也就是在平行于转动轴线一个方向上的平移运动,如图5-15e所示。
4)在一个角度方向的倾斜运动,也就是通过转动轴线的一个或两个正交平面中的角向运动,如图5-15f和g所示。
一个转动的滚动轴承,理想地说,对在旋转方向上的外加力是没有阻力的,也就是说摩擦力矩是0。根据外加载荷的种类,轴承应设计为既能支承外加载荷,而且在5个剩余自由度的任何一个或所有剩余5个自由度中具有刚度。例如,具有调心性能的轴承,可以支承径向和轴向载荷,但是理想的说,应在两个倾斜的方向没有刚度。此外,其他轴承可以设计为允许自由的轴向运动,但这时具有支承径向和倾斜方向的刚度。
3.轴承的运动误差
轴承应设计成在任何一个非旋转自由度中能承受载荷。共有5个非旋转自由度,因此轴承的运动误差定义为:在5个非旋转自由度中,任何一个非旋转自由度方向上,轴承转动轴线的位移称为运动误差。这包括了与轴承转动有关的任何位移,但不包括由于温度变化,或是由于外加载荷变化而引起的位移。运动误差用位移来表示,并且是表征与理想转动轴线的偏差。运动误差是转动的轴承中,作相对运动的内部各表面几何形状缺陷所致。这些几何形状缺陷有可能是轴承零件固有的特性(如在加工中被加工表面的形状误差),也有可能是轴承零件在装配或安装期间产生的缺陷。
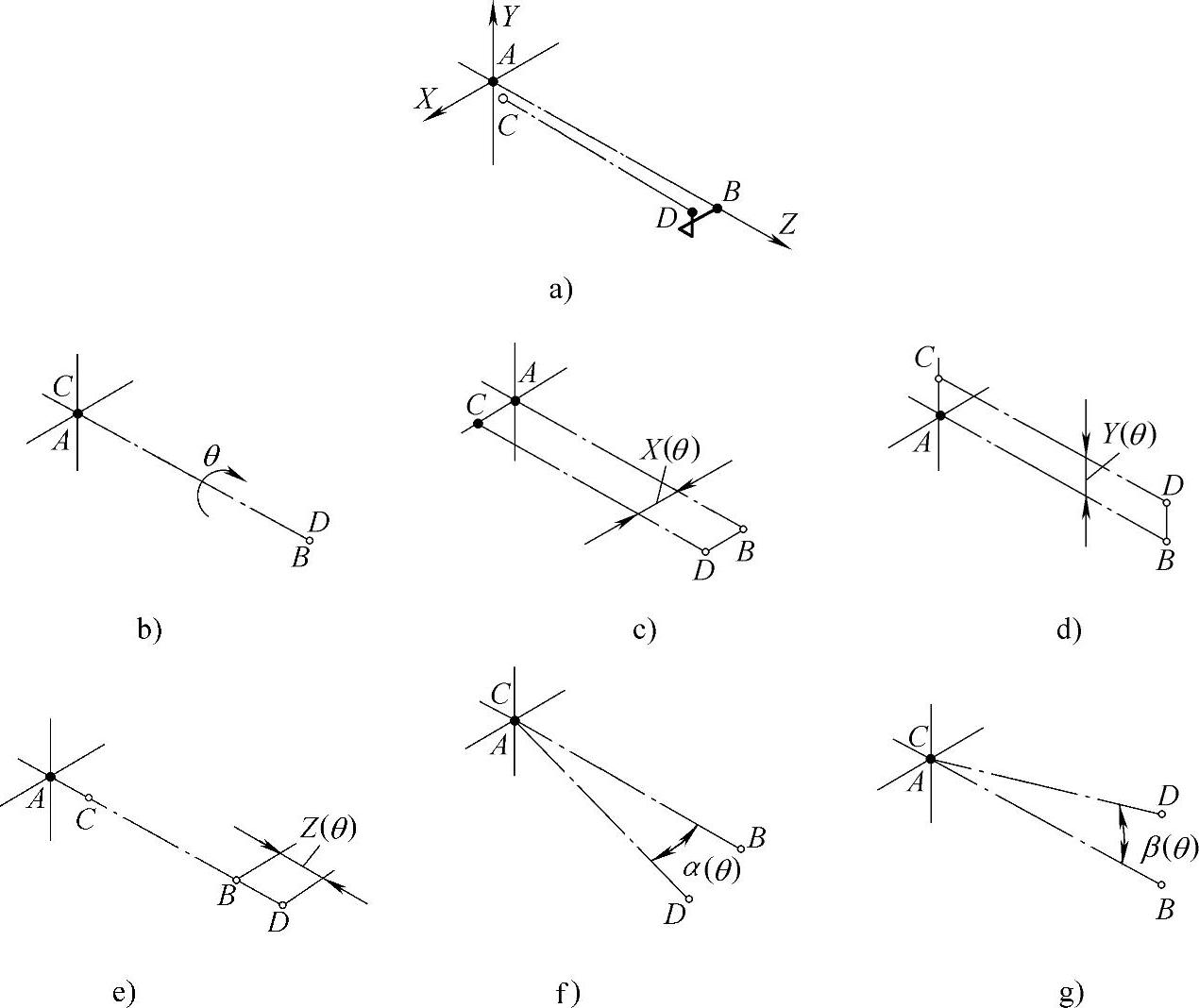
图5-15 旋转轴的6个自由度示意图
a)指明座标轴线的一般情况 b)与参考系Z轴同轴的旋转运动 c)在X方向的径向平移运动 d)在Y方向的径向平移运动 e)在Z轴方向的轴向平移运动AB=Z参考系轴线CD=旋转轴线 f)在X方向相对于原点A的倾斜运动 g)在Y方向相对于原点A的倾斜运动
4.轴承振动
引起轴承运动误差的一些因素同样也能引起轴承零件的动态振动。振动是由运动误差引起位移变化的结果,但是从另一方面来看,与加速度有关的惯性力的作用,和轴承的安装刚性特性也会在轴承中引起内部力。轴承零件随时间而变化的变形,一些不可预期的滚动体和保持架运动形式和保持器相对于滚动体或套圈的周期性位移,也都能引起内部力。振动在特定的环境条件下由运动误差而产生,如转速、载荷等。轴承振动能够影响到机械系统的性能,并使包括轴承在内的机械系统产生空气噪声。
4.1.3 轴承振动测量过程
1.测量的基础
就ISO15242第1部分的目的而言,是评估由传感器测得的一个转动着的滚动轴承的结构振动。传感器可以是位移型、速度型、加速度型或力型。传感器安装在一个滚动轴承套圈的特定点处,或安装在与一个轴承套圈机械式联接在一起的试验台的一个机械零件特定点上。传感器的作用线(即径向或轴向)必须与相对于参考系规定的位置相一致。轴承在规定的载荷条件下以固定转速转动并在规定的时间周期内监测传感器的信号。然后对采集的信号数据进行分析,计算出一个或多个参数,用这些参数来表征振动水平。这些观测的结果就产生了所选择的试验条件下的轴承振动数据。在不同运转条件下,这些测试结果不一定能得出有关轴承振动和噪声的结论。
轴承振动测量过程可用图5-14的示意图来表示。
2.转速
轴承是在动态下进行振动测量的,测量时外圈静止不动或逐渐转动,内圈则按轴承尺寸大小和结构以固定转速旋转。
在测试过程中,实际转速不应超过规定转速的1%,也不能低于规定转速的2%。
3.轴承旋转轴线的方向
轴承的振动测试可以在竖直转动轴位置上进行,也可在水平转动轴位置上进行。当在水平转动轴位置上进行时,还应考虑相对于转动着的滚动体来说地球引力方向的变化。除非滚动体的离心力或在滚动体上引起的接触力远大于其自重,否则这些因素也将引起附加的振动。
4.轴承载荷
为了达到轴承中限定的运动状态,在轴承振动测量中应对轴承加载。所施加的载荷应足够大,以防止滚动体相对于内圈和外圈滚道产生旋动滑动,而不致干扰测量结果。
5.传感器
测量的量应是轴承外圈径向振动或轴向振动的数值。一个机电式传感器可将机械运动转换为电的信号。所给出的信号应能与位移、速度或加速度成比例。力传感器也可使用,但是它必须能将信号转换为三个上述参数的一种。
应分清是非接触式测量系统还是接触式测量系统。非接触式测量特别适用于位移测量,而接触式测量系统的传感器需要与产生振动的外圈相接触。当选用接触式时,必须注意保证不能影响轴承外圈的振动。但反过来说,这种接触还需要有足够的稳固性,以便将在适当频率范围内的所有振动都能拾取得到。为达此目的,可运动的质量应尽可能小。如果振动是通过与轴承外圈相接触的传感器尖端部来传递的,还必须考虑接触共振的问题,详见本节4.1.7的介绍。
轴承外圈的振动运动,是一个在不同频率处各种振幅位移复杂叠加的过程。而且可能有比较高的单一振幅存在,特别是在高频时(有缺陷的轴承尤其如此)。一般来说,振幅随频率增高而减小,在几千赫兹频率时,甚至能减小到纳米级。这样就使得位移传感器测量系统在高频范围内很难给出可靠的测量结果。另一方面,加速度传感器测量系统,非常适合于高频振动的测量,但是对低频范围的振动测量却需要极高的动态性能才可以测出来。比较好的是速度型传感器测量系统。在速度型传感器测量系统中,信号以与速度成比例的形式表现出来。如果需要的话,还可以用已知经校准过的转换系数,把采集到的主要信号转换为电的信号。
4.1.4 轴承振动测量和评估方法
1.测量的物理量
测量所用的物理量是速度,用Vr.m.s(μm/s)来表示。测量的方向可以是径向或轴向,由被测轴承的类型决定。
2.频域
被测量的速度信号是在50~10000Hz之内,可以在一个频带内或多个频带内测出速度信号。对不同的轴承类型,建议采用特定的频率范围。
注:例如,对一定尺寸范围内的向心和角接触轴承,可以用50~300Hz、300~1800Hz和1800~10000Hz的频率范围。
也可选择频谱分析方法对振动信号进行分析。

图5-16 传感器频率响应的规定值
a—推荐的范围区 b—最大允许区(包括a在内)
3.时域
在时域范围内的速度信号中,测出峰值或脉冲最大值,可以考虑作为制造商和用户之间达成协议的一种补充选择。一般情况下,是在轴承零件表面有缺陷时,或测试轴承受到污染时,可以引起较大的振动峰值或脉冲最大值。按照轴承的类型和应用场合,可以有各种不同的评估方法。
4.传感器频率响应和滤波器特性
机电传感器的频率响应应在图5-16规定的范围之内。
图5-16中,传感器的最低频率响应要求应包括放大器的补偿输出信号。

图5-17 滤波器特性
X—截止频率 Y—衰减量 a—推荐的范围 b—最大允许范围 c—名义低截止频率 d—名义高截止频率
放大器线性度:在10μm/s和3000μm/s的速度范围内,最大线性度偏差,对振动幅值来说应小于10%。
传感器灵敏度:与电子仪器相匹配的传感器灵敏度,应规定在±5%之内。在传感器静态轴向位移的工作范围内,这种灵敏度应在规定的范围之内。在各个传感器之间灵敏度有变化的情况下,必须由电子仪器提供适当的补偿。
电子仪器的滤波特性应在图5-17规定的带通滤波器极限范围之内。低于低截止频率(flow)64%的所有频率,和高于高截止频率(fhigh)160%的所有频率,通带的衰减应不低于40dB。
5.取时间平均值的方法
在每个频带范围内速度信号的测量,应是在振动达到稳定水平时,在不小于5s的时间内读取有代表性时间平均读数。所谓达到振动稳定水平,是指在平均值附近只有偶尔的随机波动。至于选择哪种取时间平均值的公式,应由制造商和用户协商决定。两种典型的取时间平均值的公式是,均方根值(r.m.s)和指数平均有效值(e.m.e)。其定义在本节4.1.1中已经给出。其数学表达式分别为:
均方根值:

式中 V(t′)——随时间而变化的振动速度;
T——取样时间。取样时间应长于组成V(t′)中任何一个主要频率分量的周期。
经常是在t=T时读取均方根值速度Vr.m.s.。
指数平均有效值:

式中 V(t′)——是随时间而变化的振动速度;
τ——是衰减周期。它应长于组成V(t′)中任何一个主要频率分量的周期。
Ve.m.e.(t)应在t﹥﹥τ的时间内读取读数。
应该在开始评估的5min内达到稳定状态。如果在5min内不能达到稳定状态,应由制造商和用户共同商定一个合适的测量时间。
6.测试顺序
测量应在所需要的几个位置上进行。对特定的轴承类型,将在ISO15242其他部分予以详细说明(对向心球轴承在ISO15242-2中说明,见本节4.2)。
4.1.5 测量条件
1.被测轴承状态
(1)预润滑 预先加了润滑剂(润滑脂、润滑油或固体润滑剂)的轴承,包括密封轴承和带防尘盖的轴承,应在原来的状态下进行测试。
对于未经预先润滑的轴承,则应按下列(2)和(3)的程序进行。
(2)轴承的清洁度 因为污物杂质会影响振动水平,所以必须对轴承进行认真清洗。特别注意不要将污物杂质或其他可能引起振动的物质混入轴承中。
注:某些涂在轴承中的防锈剂也可满足振动测试润滑的要求。在这种情况下就不需要重新清洗去除防锈剂。
(3)润滑 在测试之前,应根据轴承类型和尺寸,用洁净的低粘度润滑油对轴承进行润滑。润滑过程中应使轴承转动以便润滑剂能在轴承中均匀分布。
2.试验的环境条件
轴承应在室温下进行测试,环境条件不应影响轴承的振动。
3.对试验装置的要求
(1)主轴/心轴支承刚度 主轴(包括心轴在内)是用来支承并驱动轴承内圈旋转的。因此除了传递旋转运动外,主轴(包括心轴)还应是内圈轴线的刚性参照系统。在主轴/心轴支承和轴承内圈之间的振动传递,在所用的频带范围内,与所测得的振动速度值相比,应是可忽略不计的(如有争议,应取制造商和用户商定的精确数值)。
(2)加载机构 用来对轴承外圈加载的机构,理想的是在所有径向、轴向、角向或弯曲(依轴承类型而定)方面,使轴承振动都不受到影响,使外圈基本上处于自由振动状态。
(3)外加于轴承上的载荷数值和对中要求 对特定的轴承类型,在ISO15242其他部分中详细说明,对向心球轴承详见本节表5-47和表5-49。
(4)传感器的轴向位置和测量方向 对于特定的轴承,详细规定在ISO15242其他部分中。对向心球轴承见本节图5-18和图5-19。
(5)心轴 安装轴承内圈的心轴圆柱表面,其外径应按ISO286-2的f5级公差制造,并且应有最小的几何形状偏差。这是为了保证以滑配合安装到轴承内孔中。
4.对操作者的要求
合格称职的操作者,应能保证按照ISO15242第1部分,和对应轴承类型的其他部分进行轴承振动测量。
4.1.6 测量系统的标定和鉴定评估
1.总则
应当遵循有文件规定的校准程序进行标定,以保证在轴承进行振动测试之前,对测量系统进行适时校准。
2.测量系统各单元的校准
在轴承振动测量系统中要求进行校准的各单元如下:
1)使轴承转动的驱动机构。
2)对轴承进行加载的加载机构。
3)将轴承振动转换为电信号的传感器系统。
4)处理振动电信号的电子仪器装置(放大器、滤波器和显示器)。
测量系统的每一部分,都必须保持在其原来设计的性能状态,并能在可控制的状态下进行调节。调节或校准应能追溯到在国际测量标准中或其他国家标准中的有关规定。下列各部分就是每个测量系统中的主要校准和确认的项目:
(1)驱动机构
1)主轴转速。
2)主轴的运动误差和残余振动。
3)安装轴承的主轴心轴状态(损伤、锈蚀、变形和尺寸改变等)。
(2)加载机构
1)载荷数值。
2)加载方向与主轴轴线对中程度。
3)加载点的位置。
(3)传感器
1)灵敏度和幅值线性度。
2)频率响应。
3)方向和位置。
(4)电子仪器装置(放大器、滤波器和显示器)
1)放大倍数和线性度。
2)频率特性。
3)仪表或数字显示的精度。
3.系统性能评估
如果在同样的位置并用同样的测量设备和试验参数,用轴承零件完成测量的话,则测量重复性必须在测值的10%之内。
注:测量系统的变化不包括被试轴承的变化。
4.1.7 接触共振
在国际标准ISO15242-1中专设资料性附录A,对接触共振问题进行了说明。
1.接触力
如果传感器是用弹簧加载,则为了防止传感器与轴承外圈脱离接触,所加的接触力应大于ma(这里的m是传感器可动部分的质量,而a是被测的最大加速度)。
2.接触共振
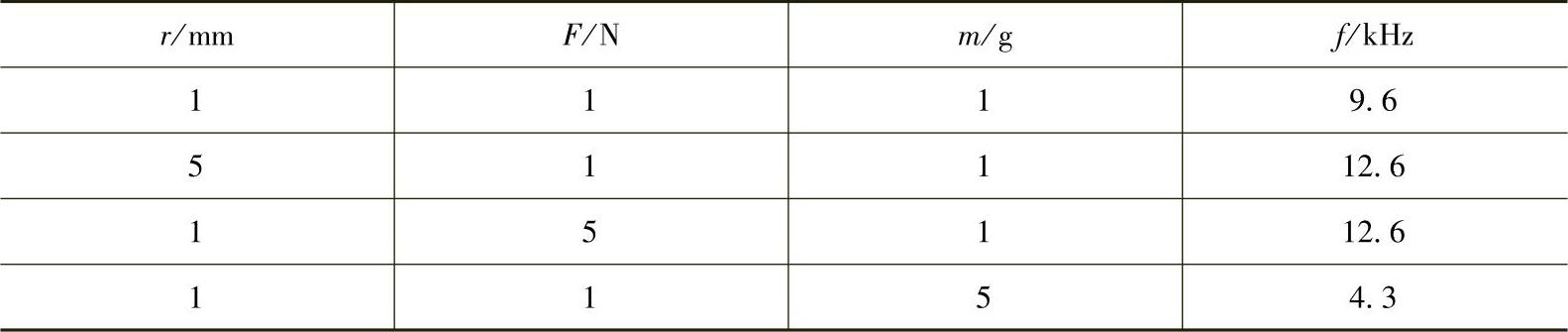
传感器的测量头具有本身材料的弹性模量E。因此传感器的触头就像弹簧那样起作用,就会有接触共振存在。如果触头是球形的,则情况就变得更为复杂了,因为这时触头就像一个弹簧那样起作用,而且其刚度是变化的,随载荷的增加而增加。弹性模量E值愈高,传感器触头半径愈大,则共振频率f值就愈高。表5-46给出了半球形传感器触头的一些例子:半球形传感器触头材料的弹性模量:E=600GPa;传感器总的运动质量为m;用静止力F将运动质量m压在轴承外圈的外表面。轴承外圈材料的弹性模量为:E=200GPa。
表5-46 接触共振频率
有关滚动轴承应用手册的文章

测量仪器仪表的测得值与被测量真值之间的差异,称为测量误差。为了表征测量的准确程度,常用相对误差的形式。例如5.0级表示满度相对误差的最大值不超过仪表量程上限的5%。解:0.5级温度计测量时可能出现的最大绝对误差、测量80 °C可能出现的最大实际相对误差分别为该温度计的满度相对误差介于1.0%与1.5%之间,因此该表的精度等级应等为1.5级。......
2023-06-22

图8-5磁化曲线测量原理图[1]冲击测量法还可用于测量材料的磁化曲线和磁滞回线。测量时选用环形样品以避免退磁场对磁化的影响。磁化线圈W1的匝数较多,与直流电源相连接,用于产生较强的磁场;测量线圈W2匝数较少,与冲击检流计相串联,用于产生感应电势,形成一个测量回路。如前所述,磁感应强度B可表述为式中,N为测量线圈W2的匝数;S为样品的截面积;Cμ为测量回路的冲击常数;αm为冲击检流计灯尺上的最大偏格数。......
2023-06-20

2)随机误差对同一被测量进行多次重复测量时,若误差的大小随机变化,不可预知,这种误差称为随机误差,又称偶然误差。随机误差的特点是:在测量次数测量足够时,其总体服从统计规律,它反映测量值离散性的大小,所以说随机误差的大小表明测量结果的精密度。产生随机误差的原因主要有机械干扰、环境干扰、电磁场变化、放电噪声、光和空气及系统元件噪声等。可以采用对多次测量值取算术平均值的方法来减小随机误差的影响。......
2023-06-22

把振动信号输入电压表,根据电压值和测量系统的电压灵敏度的大小,计算出振幅。把已记录或显示的振动波形的幅值,乘以响应的灵敏度,计算出振幅。用百分表或千分表固定在不动的参考点上作直接测量,可得位移振幅的峰值。激振力可用压电式或电阻式测力传感器测量,也可通过测量振动体的加速度并加以换算间接测量。随机振动的测量系统框图见图7-18。......
2023-08-20

从自身参数可以看出,激光跟踪仪的测距精度远高于测角精度,而且随着测量距离的增大,测角误差增大更为明显,符合表1中的观测结果。如图2所示,在Matlab中利用激光跟踪仪自身参数把随机误差注入到观测值中,以模拟点云的形式得到三维坐标的点云分布图。查定额《配合比参考表》,砾石GD40中砂425水泥C15商品混凝土参考价为135.66元/m3,则:图2 激光跟踪仪测量点云分布图......
2023-06-23

属于人为错误,由于测量人员观察错误或记录疏忽造成的大误差。对同一量进行多项目精度观测,所产生的最大偶然误差叫极限误差。根据概率统计,偶然误差大于中误差的机会约占32%,大于两倍中误差的机会约占5%,大于三倍中误差的机会约占3%,所以一般取三倍中误差值作为偶然误差的极限值。误差的绝对值与观察量之比称为相对误差。例如,测量100m,误差1cm,则相对误差为。丈量距离时,一般允许误差如下:良好地区为中等地区为不良地区为......
2023-06-29

为了对测量结果的误差进行估算,我们用约定真值来代替真值求误差。例如,用同一仪器测量10m 长相差1mm 与测量100m长相差1mm,其绝对误差相同。显然,只有绝对误差还难以评价测量结果的可靠程度,因此引入相对误差的概念。在近似情况下,相对误差也往往表示为绝对误差与测量值之比。相对误差常用百分数表示,即如果待测量有理论值或公认值,也可用百分差来表示测量的好坏,即绝对误差、相对误差和百分差通常取1~2位有效数字来表示。......
2023-11-02

相关推荐