推力球轴承只能承受轴向载荷,单向推力球轴承只能承受一个方向的轴向载荷,双向推力球轴承可以承受两个方向的轴向载荷。单向推力球轴承可以限制轴和壳体的一个方向的轴向位移,双向轴承可以限制两个方向的轴向位移。如果安装条件许可,可以使用带球面座圈的单向或双向推力球轴承。......
2023-06-26
牵连运动为圆周运动的物体,当其自转运动的轴线方向经常改变时,此物体受一惯性力矩,或称陀螺力矩的作用。
接触角不等于零的角接触球轴承和滚子轴承,在运转中滚动体的自转轴线方向是经常变化的。因此,在稳定运转状态下,滚动体中心受到离心力和惯性力矩的作用,其方向和数值可用下式表示:
Mk=J0ωwωcsinα (2-388)
式中 Mk——惯性力矩(N·m);
J0——滚动体的转动惯量(g·mm·s2);
ωw——滚动体自转角速度(1/s);
ωc——滚动体公转角速度(1/s);
α——轴承的接触角。
对于球轴承:

式中 γ——钢球材料的比重;
g——重力加速度;
Dw——钢球直径。
如为钢制球:
J0=4.2×10-8D5w
图2-84表示推力向心滚子轴承作用于滚动体上的惯性力矩的方向。图2-85表示推力球轴承中惯性力矩的方向。图2-86表示角接触球轴承中惯性力矩的方向。
由式(2-387)可知,惯性力矩MK与接触角的正弦成正比。由式(2-143)和式(2-146)可知,ωw和ωc都与轴承转速n成正比。因此接触角愈大、轴承转速愈高,则惯性力矩愈大。推力轴承和推力向心轴承中惯性力矩最大。当惯性力矩MK大于滚道对滚动体的摩擦力矩时就会发生回转滑动。

图2 - 84 推力向心滚子轴承中惯性力矩方向

图2 - 85 推力球轴承中惯性力矩的方向
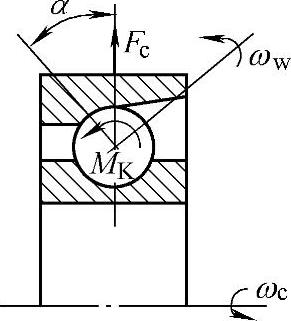
图2 - 86 向心推力球轴承中惯性力矩的方向
在推力球轴承中,轴圈如以转速n旋转,座圈静止不动,由式(2-146)可得
由式(2-143)可得
如将J0、ωw和ωc代入(2-387)式,则可得
增大滚道对滚动体的摩擦力矩,可以防止由惯性力矩引起的回转滑动。不发生回转滑动的条件是:
MF﹥MK
MF是由轴向载荷引起的滚道对滚动体的摩擦力矩。各类推力和推力向心轴承中最小轴向载荷的计算公式列于表2-59中。
表2-59 最小轴向载荷Famin
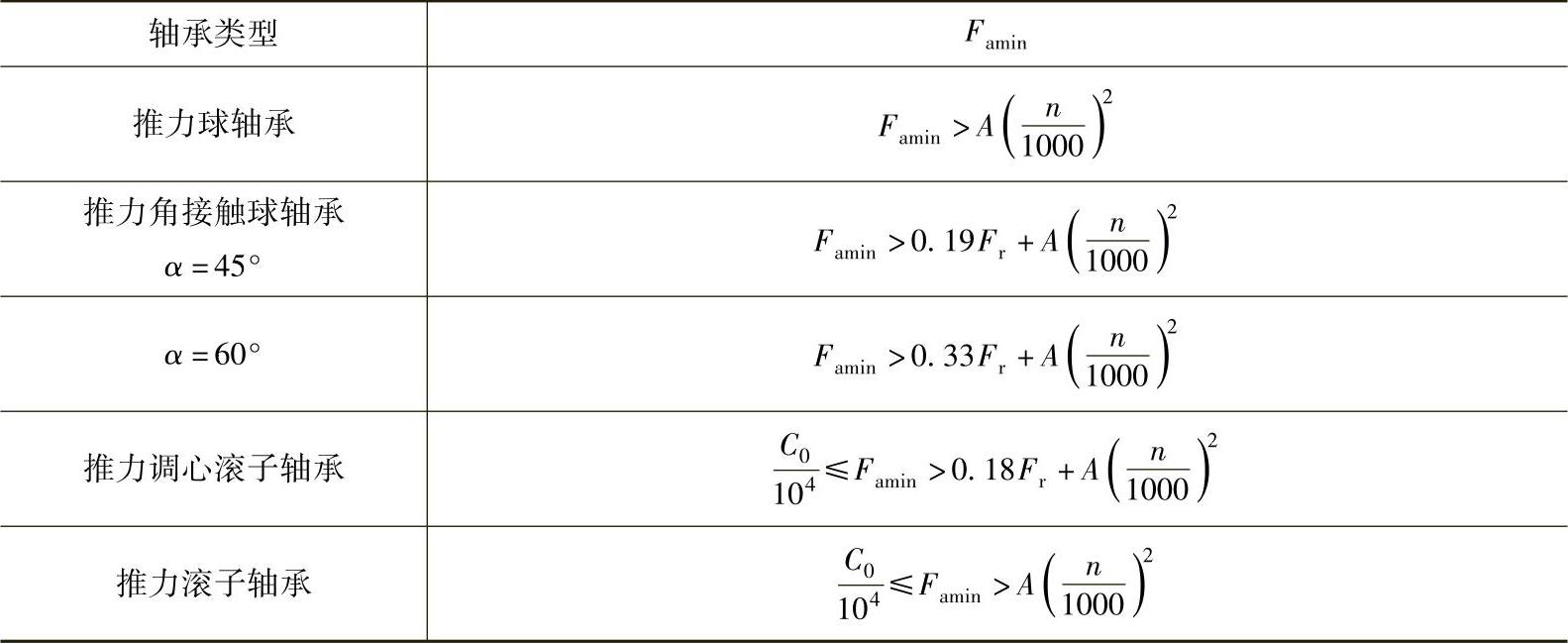
表中 Famin——最小轴向载荷(N);
Fr——径向载荷(N);
α——接触角;
n——轴承转速(r/min);
C0——额定静载荷(N);
A——最小载荷常数,可由(2-390)式算出。

系数k的数值可由表2-60查出。
表2-60 系数k值

在多数情况下,推力轴承的实际载荷超过最小轴向载荷的计算值,此时轴承不需要预紧。但当实际轴向载荷小于最小载荷计算值时,轴承必须预紧。
对于推力球轴承,在某些情况下,无法克服由于惯性力矩引起的滑动。例如在双向推力球轴承中,有一列钢球通常是不受载的,此时,钢球和滚道之间必然产生滑动。使用经验表明,当推力球轴承在轻载荷下工作时,如实际轴向载荷小于0.000016C0时,只要有良好的润滑,则钢球与滚道之间由于惯性力矩产生的滑动,不致引起轴承损坏,在这种情况下,轴承可以不预紧。
有关滚动轴承应用手册的文章

推力球轴承只能承受轴向载荷,单向推力球轴承只能承受一个方向的轴向载荷,双向推力球轴承可以承受两个方向的轴向载荷。单向推力球轴承可以限制轴和壳体的一个方向的轴向位移,双向轴承可以限制两个方向的轴向位移。如果安装条件许可,可以使用带球面座圈的单向或双向推力球轴承。......
2023-06-26

双向推力轴承在承受中心轴向载荷时,仅有一列滚动体承受载荷。这时可按单向推力轴承中的载荷分布计算滚动体载荷。双向推力轴承可以承受任意偏心载荷,如图2-31所示。表2-15 双向推力轴承的载荷分布积分JM、Ja当球轴承e≤0.3Dpw、滚子轴承e≤0.2619Dpw时,仅有一列滚动体承受载荷,在这种情况下,最大滚动体载荷可按表2-14计算。......
2023-06-26

角接触球轴承和圆锥滚子轴承可以同时承受径向载荷和轴向载荷,如图2-23所示。但是单个角接触球轴承和圆锥滚子轴承不能单独承受纯径向载荷。图2 - 23 角接触球轴承图2 - 24 角接触轴承内圈载荷分布图此类轴承中的载荷分布与载荷角β有关。轴承中任一滚动体承受的载荷,由滚动体与滚道接触处的变形量来决定。表2-12 单列角接触轴承的载荷分布积分Jr、Ja 单列圆锥滚子轴承32315承受的径向载荷Fr=40kN,轴向载荷Fa=15kN,试计算轴承中最大滚动体载荷Qmax。......
2023-06-26

对列角接触轴承可以承受任意方向的载荷,如图2-28所示。表2-13 双列轴承的载荷分布积分JrJa作用于轴承的载荷可有下列三种情况:1)Fa=0。这时轴承上仅有轴向载荷Fa,轴承中只有一列滚动体承受载荷,且此列各滚动体承受相同的载荷。这时轴承中两列承受载荷不同,Ⅰ列较大,Ⅱ列较小。如果Fa大于上述之值,则双列轴承完全像一个单列向心推力轴承那样起作用。......
2023-06-26

单向推力轴承可以承受偏心载荷,如图2-29所示。因此在这种情况下,各滚动体承受的载荷是不相同的。如引入载荷分布参数T,则那么式可改写为将式代入可得图2 - 29 单向推力轴承的载荷分布对球轴承:对滚子轴承:t=1.1由轴承受力平衡可得将式代入,并引入载荷分布积分Ja、JM可得式中由式和式可得在表2-14中列出了与JM、Ja的对应关系。因此单向推力球轴承仅能承受的偏心载荷。......
2023-06-26

并且支承的刚性好,没有轴承卡死的问题,因此应用比较广泛。此时轴承已稍带预过盈。采用两对角接触球轴承组成两个单向限位支承。每个支承中的两个轴承呈串联、两个单向限位支承呈背对背安装方式。在特定条件下,当两个轴承外圈的轴向位置不能改变时,可以用放置在内圈与轴肩之间的调整环来调整内圈的轴向位置,以期达到调整轴承游隙的目的。......
2023-06-26

调心滚子轴承能承受双向轴向载荷,同时也能承受较大的径向载荷。调心滚子轴承内圈有直孔的和锥孔的两种形式。带紧定套的调心滚子轴承,借助于锥孔和紧定套还可调整轴承的径向游隙。调心滚子轴承具有自动调心的功能,自动调整因安装条件不良造成的角度偏差的影响,调心滚子轴承对角度偏差的适应性能随轴承宽度系列、直径系列变化而变化。图1-34 振动筛用调心滚子轴承a)轴承内径d﹤75mm b)轴承内径d≥75mm图1-35 推力调心滚子轴承......
2023-06-26

表1-92~表1-94列出了双向推力轴承不同直径系列及尺寸系列的外形尺寸。单向推力轴承外形尺寸延伸规则1)轴承轴圈内径d。2)轴承座圈外径D。表1-95 fD值算得的值:① 如和标准内已有外径尺寸接近,应优先按标准选取;② 如为新的外径尺寸,则按表1-96进行圆整。表1-97 fT值4)轴承最小单向倒角尺寸rsmin。rsmin按GB/T 274—2000表3选取,其数值原则上应接近但不应大于轴承高度T的7%和剖面宽度的7%的两值中较小值。......
2023-06-26
相关推荐