智能工艺是将产品设计数据转换为产品制造数据的一种技术,也是对零件从毛坯到成品的制造方法进行规划的技术。智能工艺计算机程序人机界面,如图3-3所示。图3-5智能工艺决策专家系统构成智能工艺决策专家系统具有以下特点:以“逻辑推理+知识”为核心,致力于实现工艺知识的表达和处理机制,以及决策过程的自动化。采用人工智能原理与技术。......
2023-06-23
机器人离线编程(OLP—off-line programming)是机器人编程语言的拓展,它利用计算机图形学的成果,建立起机器人及其工作环境的模型,再利用一些规划算法,通过对图形的控制和操作,在不使用实际机器人的情况下进行轨迹规划,进而产生机器人程序。它是CAD/CAM/ROBOTICS一体化的产物。
离线编程技术的最高目标是全自动编程,即只需输入工件的模型,离线编程系统中的专家系统会自动制定相应的工艺过程,并最终生成整个加工过程的机器人程序,称为“傻瓜编程”。目前,还不能实现全自动编程。自动编程技术的核心是焊接任务、焊接参数、焊接路径和轨迹的规划技术,主要包括以下方面:
1)焊缝信息的自动获取:焊接特征提取和焊接特征建模技术。
2)焊接顺序规划:规划多条焊缝的焊接顺序。
3)焊接参数自动规划:规划焊接过程参数。
4)焊接路径自动规划:规划焊接过程中焊枪位置和姿态。
5)机器人自动放置规划:规划机器人和焊接路径之间的相对放置问题。
图5-5-18是一个典型的离线编程系统应具备的基本功能模块,图5-5-19是离线编程系统的应用框架,图5-5-20是一个离线编程应用实例,图5-5-21是任务级离线编程器的结构。
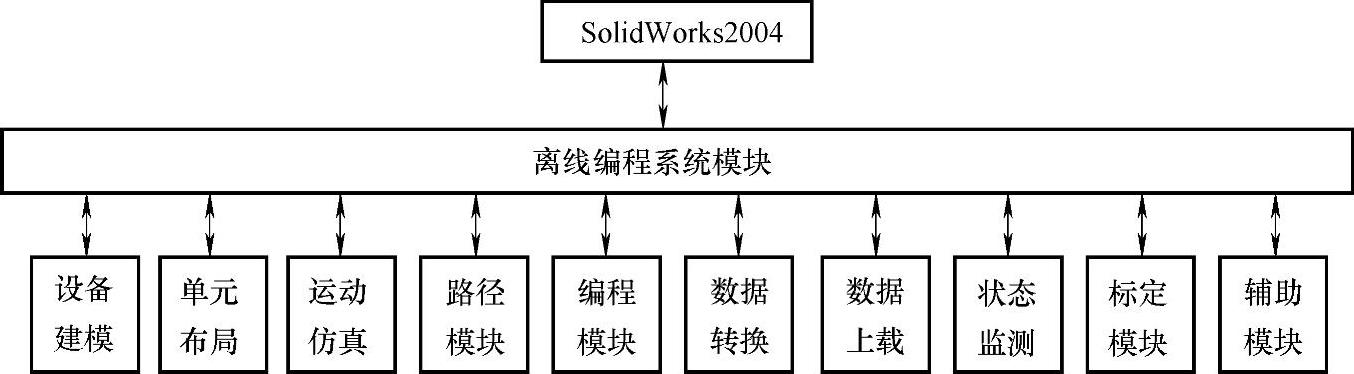
图5-5-18 离线编程基本功能模块
有关焊接方法与过程控制基础的文章

智能工艺是将产品设计数据转换为产品制造数据的一种技术,也是对零件从毛坯到成品的制造方法进行规划的技术。智能工艺计算机程序人机界面,如图3-3所示。图3-5智能工艺决策专家系统构成智能工艺决策专家系统具有以下特点:以“逻辑推理+知识”为核心,致力于实现工艺知识的表达和处理机制,以及决策过程的自动化。采用人工智能原理与技术。......
2023-06-23

主要包括传感器技术、信息传输技术、信息处理和提取技术、信息应用技术、目标信息特征的分析和测量技术等。遥感技术系统包括:空间信息采集系统、地面接收和预处理系统、地面实况调查系统、信息分析应用系统。目前主要应用的遥感软件是PCI、ENVI和ERDAS。目前,我国景观生态研究中主要利用遥感影像判读、制作专题地图,或建立RS景观生态模型。......
2023-11-19

在基于互联网的应用中,互联网作为信息传输的媒介,其带宽与稳定性对用户体验有决定性的影响。基于我国互联网发展现状,针对医院管理信息软件,开发离线应用是非常必要的。离线临时服务的启动需要一定的感知机制,不能随便就启动离线应用,毕竟这只是一种应急策略。因此系统采用了智能的离线感知判断技术,当应用真正离线或离线中心服务出现问题时,就能够第一时间捕获离线服务的运行异常,反馈给管理员和用户,并记录日志。......
2023-10-21

MapReduce编程过程如图5-25所示。图5-25MapReduce编程过程2.InputFormat文本输入。Sequence File As Binary Input Format用于处理任意二进制的数据类型,并将顺序文件的Key和Value作为二进制对象。Map阶段需要实现Mapper接口,同时继承MapReduceBase,最后再编写map方法。IntSumReducer对整型的value值求和。Map File Output Format是将排序后的Key/Value对写入到一个mapfile文件中。Multiple Sequence File Output Format是将结果输出到多个顺序文件中,其中根据Key/Value对进行分区。......
2023-11-08

可编程序控制器是计算机技术与继电器逻辑控制概念相结合的一种新型控制器,它是以微处理器为核心、用作数字控制的专用计算机。随着微电子技术、计算机技术的发展和数据通信技术的推进,可编程序控制器已逐渐取代了传统的逻辑控制装置,是当前先进工业自动化的三大支柱之一。起始点的位置传感器X0又发出信号,于是可编程序控制器的X6又接通,机械手又开始下一次的喷漆工作。......
2023-06-28

无线传感器网络是一种具有低速率、低功耗、短距离的无线网络。无线传感器网络由一组微型传感器通过Ad Hoc方式组成,网络中的传感器可以协作地感知、采集和处理被监控区域的感知对象的信息及数据,发布给使用一定形式终端设备的用户。无线传感器网络的感知对象具体地表现为被监控对象的物理量信息,如温度、湿度、速度和有害气体的含量等。它依据IEEE 802.15.4标准,在很多个无线传感器之间相互协调实现通信。......
2023-08-30

为了使集热管、聚光器发挥最大作用,聚光集热器应实时跟踪太阳位置。跟踪方式根据控制类型,可以分为光敏定日、公式定日和混合控制方式。光敏定日控制系统中利用特制的光敏传感器检测太阳位置,通过控制电动机的正反向运行,驱动聚光镜跟踪太阳。南北向放置时,除了正常的平放跟踪外,还可将集热器作一定角度的倾斜,在倾斜角度达到当地纬度时效果最佳,聚光效率可提高30%。......
2023-06-23

相关推荐