根据操作者在系统中的作用将遥控焊接机器人的运动控制模式分为直接控制、监督控制、共享控制、合作控制、自主控制。图5-5-30 多控制模式的遥控焊接机器人系统研究人员提出“宏观遥控,局部自主”的控制思想来实现遥控焊接。......
2023-06-26
(1)焊接机器人与周边设备作协调运动的焊接机器人工作站(单元)变位机与机器人协调运动是指机器人与变位机同时运动,即变位机一边变位,机器人一边焊接,焊缝的轨迹是变位机的运动及机器人的运动复合,这可使焊枪相对于工件的运动既能满足焊缝轨迹又能满足焊接速度及焊枪/焊炬姿态的要求。协调运动时,变位机的轴已成为机器人的组成部分,这种焊接机器人系统可以多达7~20个轴,或更多。焊接机器人与变位机协调运动焊接系统如图5-5-14所示。
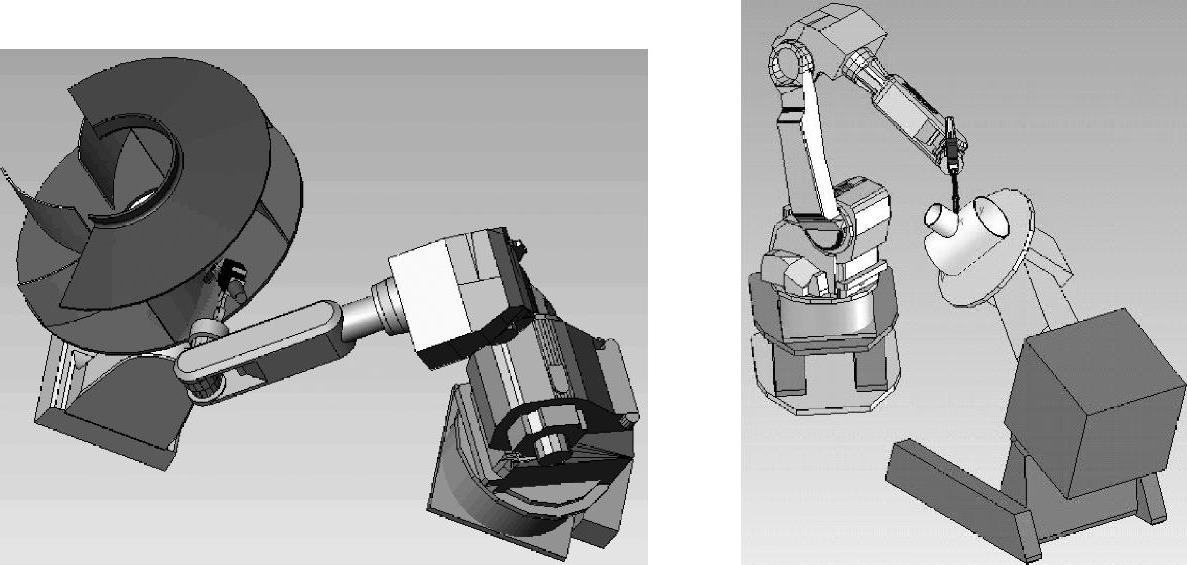
图5-5-14 焊接机器人与变位机协调运动焊接系统
(2)多机器人焊接系统 典型的多机器人焊接系统如图5-5-15所示。“协调与合作”是多机器人系统需要考虑的问题。
当多机器人系统接受一个任务时,首先应考虑如何组织机器人去完成任务,这时要解决的是多机器人之间怎样进行有效的合作。当经过某种方法确定了各机器人的任务与关系后,应该考虑如何保持机器人之间的运动协调一致性,即多机器人协调。
多机器人协作焊接如图5-5-15b所示,一个机器人把持工件,并完成工件的变位,其余机器人进行焊接。这种由机器人来代替变位机的方式大大提高了系统的柔性,同时也极大地减少了工件装卡的时间,提高了系统的工作效率。
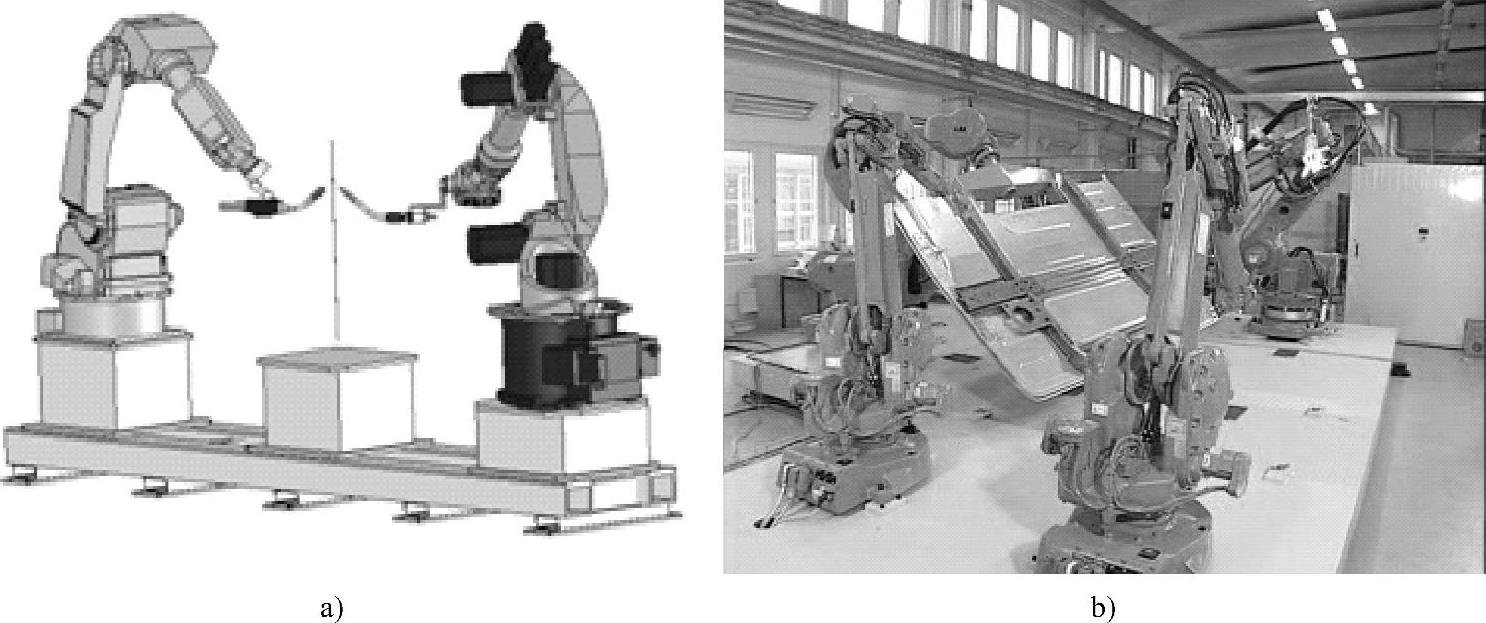
图5-5-15 多机器人焊接系统
a)双机器人焊接系统 b)多机器人焊接系统
(3)机器人柔性生产线 机器人柔性生产线是在焊接机器人工作站日益成熟的基础上发展起来的,由多台焊接机器人工作站组成的系统,可以方便地实现多种不同类型工件的高效焊接,如图5-5-16所示。
焊接柔性生产线一般有一个轨道子母车,子母车可以自动将定位焊后的工件从存放工位取出,送到有空位的焊接机器人工作站的变位机上。也可以从工作站上把焊好的工件取下,送到成品件流出位置。整个机器人柔性生产线由一台计算机调度控制。
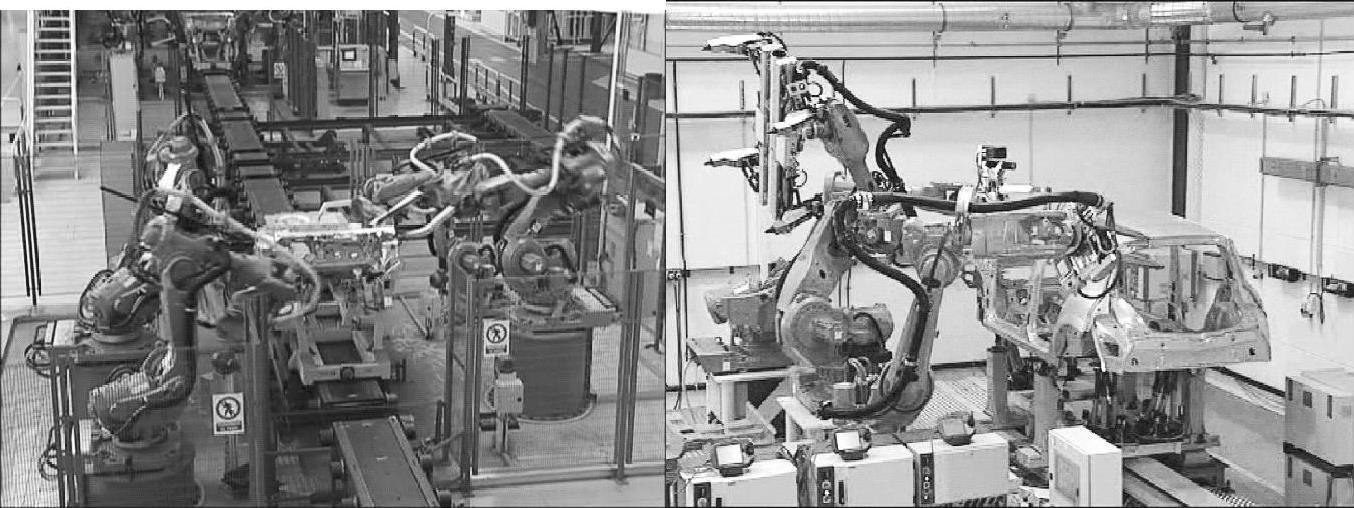
图5-5-16 机器人柔性生产线
有关焊接方法与过程控制基础的文章

根据操作者在系统中的作用将遥控焊接机器人的运动控制模式分为直接控制、监督控制、共享控制、合作控制、自主控制。图5-5-30 多控制模式的遥控焊接机器人系统研究人员提出“宏观遥控,局部自主”的控制思想来实现遥控焊接。......
2023-06-26

一般情况下,系统的复杂性指的是系统结构的复杂性、系统性能的复杂性、组成系统个体的复杂性以及个体和个体之间相互作用的复杂性。复杂系统体现出的特征,相对于成分而言是一种质的变化,这种质的变化称为涌现性。对复杂系统的研究中最为著名的是美国圣塔菲研究所的学者霍兰于1994年提出的复杂适应系统理论。该理论的基本思想指出,复杂性科学,实质上是一门关于涌现的科学。......
2023-07-02

当采用传感器引导机器人运动的方式时,因为传感器投射的结构光纹在焊枪之前有一定距离,所以提取的特征点信息在跟踪过程中不是立刻被使用的,而要等到焊枪到达该点附近时才能用到。机器人的驱动向量使焊枪向焊缝的中心点方向调整,并按照给定的步长运动,使其始终沿焊缝方向向前运动,实现沿焊缝的自主跟踪。另外,应尽量控制焊缝的特征点处在结构光纹正中,因为这时在跟踪中产生的误差最小。......
2023-06-26

焊接机器人突破了焊接刚性自动化的传统生产方式,开拓了一种柔性自动化生产方式,使小批量产品自动化焊接生产成为可能。典型的焊接机器人组成如图8-9所示。为了使机械手充分发挥效能,焊接机器人系统通常采用两台变位机,当其中一台进行焊接作业时,另一台则完成工件的装卸,从而提高整个系统效率。控制器负责处理焊接机器人工作过程中的全部信息和控制其全部动作。此外,还有激光焊接机器人。......
2023-06-26

传感器接口:小型仿生机器人传感系统中包含有位置检测传感器、视觉传感器、触觉传感器和力觉传感器等,这些传感器随时都在采集机器人的内外部信息,并将其传送到控制系统中,这些工作都需要传感器接口来完成。......
2023-06-26

机器人控制系统的工作机理决定了机器人的控制方式,也就是决定了机器人将通过何种方式进行运动。这种控制系统较为常用,仿生机器人的控制系统就是通过预先编程,然后将编好的程序下载到单片机上,再通过遥控器调取程序进行控制的。在仿生机器人控制系统中,由遥控器发出移动至目标位置的命令,经控制系统后输出PWM信号,驱动机器人关节转动,再由检测系统检测关节转角,进行调整。......
2023-06-26

随着先进制造技术的发展,基于工业机器人技术的自动化、柔性化与智能化生产方式已成为制造现代化的主要标志。图12-21是根据焊接生产条件下对环境与过程信息获取、特征量提取、决策控制与优化以及质量检测等各环节的技术需求,提出的机器人智能化焊接系统应具备的基本功能。图12-21 机器人智能化焊接系统的基本功能......
2023-07-02

随着功率器件、微电子、计算机以及工业与其他科学技术的发展,焊接技术不断创新和发展。本书除介绍成熟或比较成熟的焊接技术外,将简单介绍焊接技术的新发展及其趋势。......
2023-06-25
相关推荐