电动机的接线端子和驱动器的接地端子以及滤波器的接地端子必须保证可靠的连接到同一个接地点上,机身也必须接地。MINAS A5系列伺服系统有位置控制、速度控制和转矩控制,以及全闭环控制等控制模式。......
2023-06-15
从机器人的工作原理可见,机器人的运动精度是由各个关节的角位移精度决定的。每一个关节都是一个独立的位置伺服机构。
焊接机器人多采用交流伺服电动机驱动。机器人关节伺服驱动单元包括交流伺服电动机和交流伺服驱动器,如图5-5-7所示。
机器人关节的位置控制采用三层闭环回路来实现,如图5-5-8所示。最内部是电流环,电流环外面是速度环,最外面一层是位置环。
位置和速度反馈传感器是安装在交流伺服电动机轴的非负载端的光电编码器。
闭环控制中的电流环可以控制由于机器人变负载引起的电流突变,使电枢线圈中的电流在幅值和相位上都得到有效控制,从而达到保护设备、提高机器人运行稳定性的目的。
速度闭环控制通常采用比例积分控制。它的输出为电流指令(直流量)。在速度控制形式中,要求对交流伺服电动机在各种运行状态下的速度加以控制,以满足负载的工作要求,保证在定位时不产生振荡,保证焊接过程中焊接速度的稳定性。
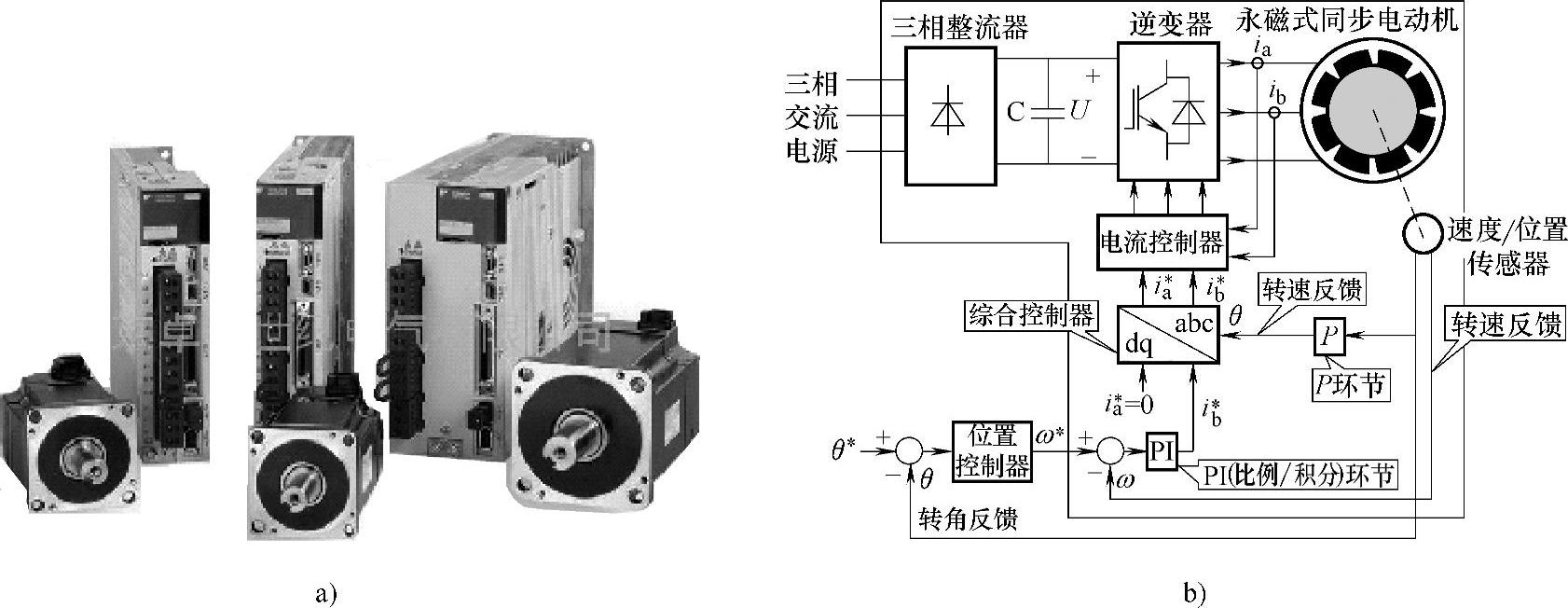
图5-5-7 交流伺服电动机和交流伺服驱动器
a)交流伺服电动机和驱动器 b)驱动器工作原理
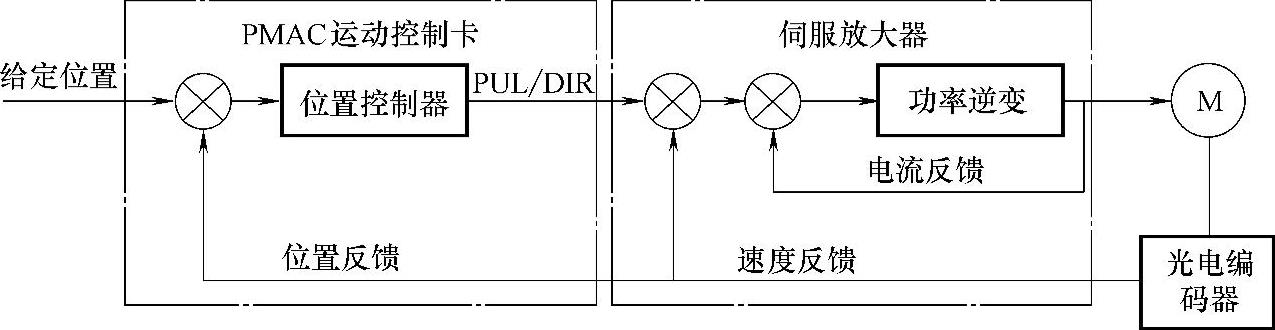
图5-5-8 位置控制的原理图
位置闭环控制可以保证焊接时的重复位置精度、轨迹重复精度、绝对位置精度和绝对轨迹精度等。当给定运动脉冲数时,交流伺服电动机能以较高的转动精度保证弧焊机器人末端执行器的精确位置(电动机驱动误差小于1.75‰)。
在一个伺服周期(插补时间间隔)内,由插补算法和机器人逆运动学算法计算出关节控制输出角度值,由机器人系统各关节的运动减速比及电动机码盘的分辨率求得对应的控制脉冲数,然后根据伺服周期将控制脉冲数转换为所需的分频系数和计数初值并送入基于PC总线的脉冲发生器,脉冲发生器在伺服周期内向伺服驱动器均匀发出驱动脉冲,实现机器人系统关节运动的平稳控制。
图5-5-9是KUKA机器人公司网站上提供的4、5、6三个关节的驱动机构。

图5-5-9 机器人后三关节运动的实现方式
a)4、5、6关节示意图 b)4关节运动实现 c)5关节运动实现 d)6关节运动实现
有关焊接方法与过程控制基础的文章

电动机的接线端子和驱动器的接地端子以及滤波器的接地端子必须保证可靠的连接到同一个接地点上,机身也必须接地。MINAS A5系列伺服系统有位置控制、速度控制和转矩控制,以及全闭环控制等控制模式。......
2023-06-15

用式(8-5)的T6可以表示手部的位置和方向,这样,六连杆机器人在它的活动范围内可以任意定位和定向。这样,变换T6可用下列矩阵表示:图8-7机器人手部机器人机构运动方程建立之后,如何根据已知(给定)的T6来求各关节坐标系的解,是机器人控制中更为重要的问题。......
2023-06-26

运动系统由骨、关节(骨连结)和骨骼肌组成。按其所在部位,分为颅骨、躯干骨和附肢骨,前二者统称中轴骨。骨干与垢相邻的部位称干垢端。第6颈椎横突末端前方有特别明显的结节,因颈总动脉行于前方,称颈动脉结节。柄和体结合处向前突出,称胸骨角,其两侧平对第2肋,是计数肋的重要骨性标志。第1肋骨扁宽而短,近水平位,其上面中部有一结节称前斜角肌结节,结节前方和后方分别有锁骨下静脉沟和锁骨下动脉沟。......
2023-12-03

AS机器人有左右两个电动机,是其主要动力来源。因此,在对运动精度要求较高的场合,首先要校正机器人的电动机偏差。其中sleep(0.8)是机器人转90°所需要的时间。该值和转弯速度以及机器人的电动机有关,需要实际调整,此外地面的摩擦力也有影响。利用sleep()函数是控制电动机工作的常用方法。......
2023-06-26

采用直流伺服电动机作为执行元件的伺服控制系统,称为直流伺服系统。直流伺服电机驱动控制方式直流伺服电机为直流供电,为调节电机转速和方向,需要对其直流电压的大小和方向进行驱动控制。脉冲宽度调制直流调速驱动系统原理如下式所示。1)PWM变换器基本原理脉宽调制型功率放大电路的基本原理是:利用大功率电器的开关作用,将直流电压转换成一定频率的方波电压,通过对方脉冲宽度的控制,改变输出电压的平均值。......
2023-06-23

YL-335B需要设置的伺服参数不多,只在前面板上进行设置就行。伺服系统的参数设置应满足控制要求,并与PLC的输出相匹配,如表2-13所示。......
2023-06-15
伺服电动机都带有这种反馈控制的机制。伺服电动机是将输入的电压信号转换为转矩和转速以驱动控制对象。交流伺服电动机也是无刷电动机,可分为同步和异步电动机。......
2023-06-26
相关推荐