图3-38STM的工作原理及仪器结构根据STM记录数据的不同,可将STM的工作模式分为恒流扫描和恒高扫描。图3-39STM的两种工作模式恒流模式恒高模式两种工作模式各有优缺点,恒流模式具有更好的垂直分辨率,但其扫描速度较慢;而恒高模式的扫描速度较快,可用于样品的某些动力学过程的研究,但其垂直分辨率较低。选择STM的工作模式时主要考虑样品表面的平整度,当样品表面粗糙时,通常采用恒流扫描;而样品表面很光滑时,可采取恒高模式。......
2025-09-29
下面以常用的关节坐标型机器人为例,介绍机器人的工作原理。
图5-5-4是一个典型6关节工业机器人,图5-5-5是其运动学描述。
从图5-5-4中可见,机器人的机械本体是由数个刚性杆件以旋转关节串联而成。它是一个开环关节链,一端固定在基座上,另一端是自由的,安装着末端操作器(如焊枪/焊炬或焊钳)。末端操作器的工具中心点(TCP)的轨迹是6个关节运动所合成的。机器人运动控制的本质就是根据编程指令来指挥6个旋转关节协同动作,以完成工具中心点所要求实现的运动轨迹。由于其4、5、6三个关节轴交于一点,机器人前三个关节(腰、肩、肘)的运动主要决定机器人末端的空间位置,后三个关节(转腕、摆腕、转手)的运动主要决定机器人末端的空间姿态。工业机器人采用这种结构形式能保证在最小几何尺寸条件下达到最大工作空间,能以最优的路径和较高的精度运动到指定的焊接位置。
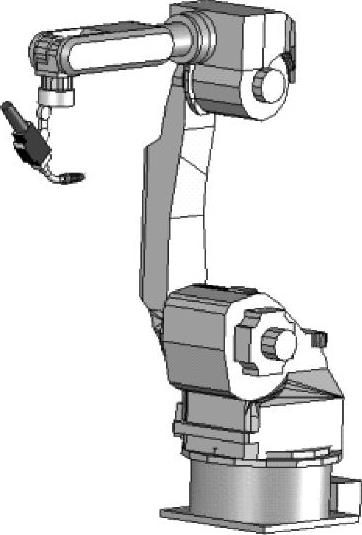
图5-5-4 典型6关节工业机器人
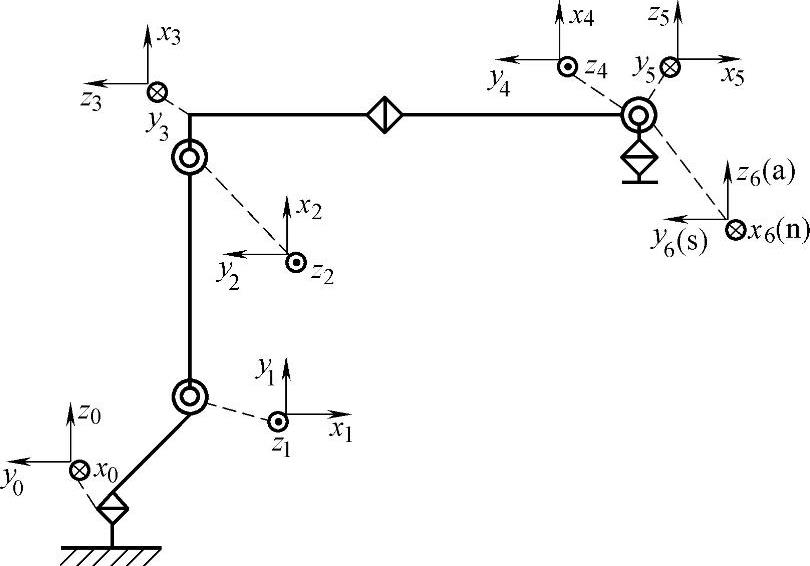
图5-5-5 工业机器人运动学描述
机器人有两个重要的坐标系,分别为关节坐标系和世界坐标系。(https://www.chuimin.cn)
1)关节坐标系:每个关节的转角用θi(i=1,2,3,4,5,6)表示。(θ1,θ2,θ3,θ4,θ5,θ6)表示机器人的一个运动位置。
2)世界坐标系:又称基座坐标系,坐标系的原点在基座上。一般地,焊枪的位姿用世界坐标系表示。
机器人运动学包括机器人正运动学和机器人逆运动学。
机器人正运动学是在已知杆件几何结构参数和每个关节的转角条件下,求解末端执行器相对参考坐标系的位置和姿态。这实际上是建立机器人运动学方程问题。在机器人示教过程中,机器人控制器逐点进行正运动学运算。
机器人逆运动学是指已知末端执行器的空间位置和姿态,求解要到达这个位姿机器人各个关节需要转动的角度。这实际上是求解运动学方程的问题。在机器人再现过程中,机器人控制器逐点进行逆运动学运算,将角矢量分解到机械臂各关节上。
由于篇幅的限制,这里不再具体介绍机器人正、逆运动学的数学推导,可以参考相应的机器人书籍。
相关文章

图3-38STM的工作原理及仪器结构根据STM记录数据的不同,可将STM的工作模式分为恒流扫描和恒高扫描。图3-39STM的两种工作模式恒流模式恒高模式两种工作模式各有优缺点,恒流模式具有更好的垂直分辨率,但其扫描速度较慢;而恒高模式的扫描速度较快,可用于样品的某些动力学过程的研究,但其垂直分辨率较低。选择STM的工作模式时主要考虑样品表面的平整度,当样品表面粗糙时,通常采用恒流扫描;而样品表面很光滑时,可采取恒高模式。......
2025-09-29

C1、L2、C2组成第二级π形滤波抑制电路。R27与IC2构成2.5V基准电压,该电压加到IC3B的3脚同相输入端,反相输入由电阻R30、R31分压取得,分压电压加到IC3B的2脚。同时,由于负载电流超出设计值,通过高频变压器耦合,开关管的源极电流上升,R20检测电压上升,通过R19引起IC1的3脚电压上升。当该电压超过1V时,IC1将关闭6脚输出,第二次起到过电流保护时作用。......
2025-09-29
智能榴弹通过弹道探测装置测量弹丸位置姿态信息、目标位置或两者之间的相对运动信息, 弹上计算机或制导站依据制导律和弹道信息生成控制信号, 并控制执行机构动作, 进而改变弹丸运动姿态来改变弹丸受力, 实现弹道修正控制。图2-10智能榴弹工作原理本节以固定鸭舵式二维弹道修正引信为例, 介绍智能榴弹工作原理。经多次修正后, 使弹丸以较高精度对目标进行攻击。......
2025-09-29

同相就是同步,它可使整流输出的电流达数十安培;由L2、C14、C15、R20、C16组成输出滤波电路,R20、C16为高频衰减旁路回路,使输出的纹波电压在高频段最低,C14、C15、L2为输出低频段π形滤波回路,整个输出纹波大为降低。图5-2 电流模式高精控制LT3825直流电源原理图......
2025-09-29

下面以单相桥式逆变电路为例说明其基本工作原理,其原理如图3.1所示。这就是逆变电路最基本的工作原理。图3.1逆变电路原理图及工作波形当负载为电阻时,负载电流io 和电压uo 的波形形状相同,相位也相同。当逆变电路负载为感性或容性负载时,其输出电压将超前或滞后电流,输出功率的瞬时值将会有正有负。因此,逆变电路必须能够在四象限工作才能适应各种不同的负载情况。......
2025-09-29

图4-36是NCP1280的引脚排列图。R20,R21以及VT4组成过热保护电路。电压检测电路由R81、R45组成,R80、R79是NCP1280的反馈电压比较电路,它把输入电压Vin的斜坡电压与PFC的输出电压VEA相比较,其差值由占空比进行调整。图4-35 NCP128O工业电源电路图图4-36 NCP1280引脚排列图VT17、VT19是5V输出的同步整流电路,R53是VT17的驱动电阻,R59是VT16的驱动电阻。VD7、VS10、VT20、VD20、VS9组成输出电压反馈取样和过电压保护电路。......
2025-09-29

TDA2822M的功能框图如图8.4-4所示,一般采用DIP8封装或SOP8封装,该收音对讲机使用的是SOP8封装。图8.4-10电感线圈8.电感线圈如图8.4-10所示,该收音对讲机使用了4个Φ3mm的电感线圈,L2的电感量为6T,L1、L3、L4的电感量都为5T。......
2025-09-29
埋弧焊时,焊丝通过导电嘴穿过覆盖在待焊区表面的颗粒状焊剂层,与母材之间产生电弧。埋弧焊的过程原理如图1-4-1所示。半自动埋弧焊的焊丝送进由机械完成,而电弧的移动则由手持焊枪移动完成,很少使用。......
2025-09-29
相关推荐