表10-15 点焊缝的质量要求2.点焊缝的质量控制方法1)在焊接前对板件表面的油污、灰尘进行处理,以保证点焊接头的质量稳定。2)定期进行点焊撕裂试验,特殊工序,每周一次;非特殊工序,每月一次。因此,当电极尖端磨损后,需要将电极端面直径维持在一定范围内,从而稳定焊接质量。一般每焊接300焊点修磨一次电极头。......
2023-06-15
点焊机器人通常由操作机、控制器和点焊钳等组成,现代点焊机器人的特点如下:
1)采用逆变一体式点焊钳,大大降低了机器人抓重。具有控制精度高、响应速度快、节能、焊接工艺性能好等显著优点。
2)采用新型电极驱动机构。近年出现的伺服式点焊钳(枪),用伺服马达作位置反馈,当机器人运行时,机器人控制伺服钳作为其辅助轴之一,可实现电极加压软接触及电极压力实时调节,在与焊接电流最佳配合后,显著提高了点焊质量和消除喷溅。例如MOTOMAN点焊机器人已在日本、美国和欧洲获得应用。最新型的伺服焊钳具有气电两种动力来源,既可采用传统的气(液压)缸也可采用交直流伺服电动机作为焊钳驱动装置。其特点如下:
①压力建立过程迅速、机械负载降低、噪声低、喷溅少、小冲击施压,电极寿命长。
②伺服电机驱动和气缸驱动任意变换;可实现压力的实时调节,即可在焊接过程中改变压力,实现多种任意可调的稳定压力循环曲线,提高生产效率。
③自动补偿电极磨损,电极压力稳定,提高焊接精度和焊点质量。
新型伺服焊钳的优异性能使其成为车身点焊机器人焊钳的首选辅助设备。其最新研究是基于伺服反馈特性,进行工件不合理匹配、电极磨损故障和焊点压痕的点焊质量在线检测。
图2-2-104为Fronius公司出产DELTA SPOT伺服点焊系统,该系统在电极与工件之间增加了电极带,不但在点焊过程中可以保护工件表面状态,减小焊接喷溅;而且电极与电极带、电极带与工件之间产生的附加电阻可以减小焊接功耗。
3)自动快速更换多种焊钳技术。机器人带有焊钳储存库,可根据焊装部位的不同要求或焊装产品的变更,自动从储存库抓换所需焊钳(见图2-2-105)。增加了机器人的柔性。
4)配备自动化的质量和产量控制系统,如机器人三维激光视觉系统、数字摄像控制系统、射线质量检测系统等,有利于焊接质量的集中管理和控制。
5)新型的离线示教机器人,可借助CAD/CAM获取焊件构造、焊接条件和机器人机构等信息,进行离线示教,示教时间短,焊接质量稳定。
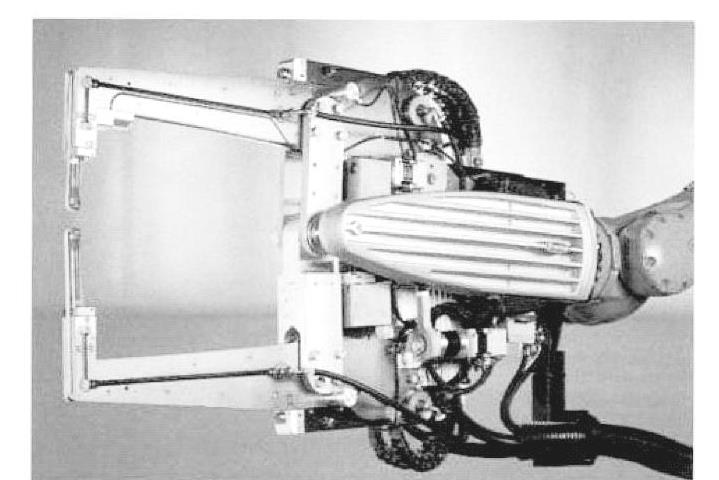
图2-2-104 DELTA SPOT伺服点焊钳
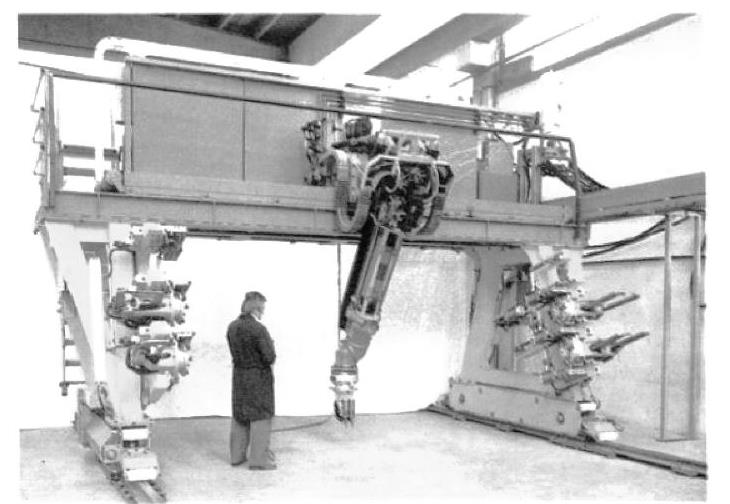
图2-2-105 可自动更换焊钳的点焊机器人
有关焊接方法与过程控制基础的文章

表10-15 点焊缝的质量要求2.点焊缝的质量控制方法1)在焊接前对板件表面的油污、灰尘进行处理,以保证点焊接头的质量稳定。2)定期进行点焊撕裂试验,特殊工序,每周一次;非特殊工序,每月一次。因此,当电极尖端磨损后,需要将电极端面直径维持在一定范围内,从而稳定焊接质量。一般每焊接300焊点修磨一次电极头。......
2023-06-15

2)调节点焊散热条件,使接触面两侧的散热均匀。通过上、下电极直径的不同,使温度场分布趋于合理,减小了熔核的偏移。必要时可用电容点焊机或高频焊机,采用大规范,使得电流场合理分布,能更好地解决边缘效应对贴和面集中加热的效果,由于焊接时间短,使热损失下降,散热的影响相对减小,上述这些条件均对纠正熔核偏移现象有利。也可用电容贮能点焊机点焊厚度差很大的精密零件。......
2023-06-15

并必须采取避免触电、高空坠落和火灾等事故的安全措施。8)点焊机起动前,先编制点焊程序,接通控制线路的转换开关和焊接电流小开关,安插好极数调节刀开关的位置,接通水源、气源,控制箱上各调节旋钮,电极触头保持光洁。当负载过小,引燃管内电弧不能发生时,严禁闭合控制箱的引燃电路。2)点焊机长期停用,应在不涂漆的活动部位涂上防锈油脂。更换闸流管亦应预热30min,正常工作控制箱的预热不少于5min。......
2023-06-15
点焊机器人主要用于汽车整车的焊接工作,一般装配每台汽车车体大约需要完成3500~4500个焊点,而其中的80%是由机器人完成的。生产现场使用的点焊机器人的分类、特征和用途见表10-12。表10-12 点焊机器人的分类、特征和用途典型点焊机器人以持重为1000N,最高速度为4m/s的6轴垂直多关节点焊机器人为主。表10-13 点焊机器人的主要技术指标(续)......
2023-06-15

在我国点焊机器人约占焊接机器人总数的46%,主要应用在汽车、农机、摩托车等行业。图2-2-72为点焊机器人实物照片。2)必须使点焊机器人可达到的工作空间大于焊接所需的工作空间,该空间由焊点位置及焊点数量确定。某些先进的点焊机器人,可自动更换焊钳种类和型号。4)根据选用的焊钳结构,焊件材质与厚度及焊接电流波形来选取适当抓重的点焊机器人,通常抓重为50~120kg。点焊机器人的组成如图2-2-73所示。......
2023-06-26

由于机器人在科学领域和公众的认知中具有更高的优先级,因此对机器人的历史已经进行了更为广泛的统计分析。如2.1节所述,机器人制造商是在机器人技术中早期负责抓取初始开发的人员。Unimate机器人作为George Devol和Joseph Engelberger的创意,是一个重达2 t的机器人,由存储在磁鼓上的程序控制。通用汽车公司估计Unimate机器人的寿命最长为18个月。......
2023-06-15

目前,机器人分类方法还没有统一的标准,一般有以下几种分类方法。地面机器人主要是指智能或遥控的轮式和履带式车辆。尽管服务机器人的起步较晚,但应用前景十分广泛,目前主要应用在清洁、护理、执勤、救援、娱乐和代替人对设备维护保养等场合。该机器人项目的最终目标是到2050年,开发完全自主仿人机器人队,能赢得对人类足球世界冠军队。......
2023-06-26

相关推荐