机电一体化的伺服控制系统的结构类型繁多,但从自动控制理论的角度来分析,伺服控制系统一般包括控制器、功率放大器、执行机构、检测装置四部分。图4-4给出了伺服系统组成原理框图。①系统精度:伺服系统精度指的是输出量复现输入信号要求的精确程度,以误差的形式表现,可概括为动态误差、稳态误差和静态误差3个方面。......
2023-06-23
1.开环系统
无位置反馈装置的伺服驱动系统称为开环系统,使用步进电动机(包括电液脉冲马达)作为执行元件是开环系统最明显的特点。
开环系统的基本组成如图1.2-6所示。CNC输出的指令脉冲,经过步进驱动器的环形分配器或脉冲分配软件的处理和电流调节、功率放大后,驱动电动机电枢,控制步进电动机的角位移。因此,CNC只需要控制环形分配器的输出脉冲数量与频率,就可以控制步进电动机的转角与转速,从而间接控制了移动部件的移动速度与位移量。

图1.2-6 开环系统的基本组成
为了匹配电动机步距角和脉冲当量,并对转矩进行放大,开环系统一般需要配置机械减速装置。步进电动机经过减速装置带动丝杠旋转,并通过滚珠丝杠螺母副将角位移转换为移动部件的直线位移。
采用开环系统的数控机床结构简单、制造成本低,也不存在闭环系统的稳定性问题。但由于系统不能检测运动部件的实际位移,因而无法通过反馈自动调节和消除误差;此外,步进电动机的步距角误差、齿轮与丝杠等部件的传动误差等,最终也将影响零件的加工精度;特别是在负载转矩超过电动机输出转矩时,将导致步进电动机的失步,使加工无法进行。因此,它只能用于加工精度要求不高、负载轻且变化不大的简易型与经济型数控机床。
2.半闭环驱动及其特点
以旋转编码器作为位置检测器件、但不检测最终控制量的伺服驱动系统,称为半闭环系统。直线运动轴的编码器,通常安装在传动丝杠或伺服电动机上;回转轴的编码器,通常安装在蜗杆或伺服电动机上。由于伺服电动机、丝杠、蜗杆和工作台中间为机械刚性连接,因此,通过这样的检测装置,可以间接反映最终运动部件的位移和速度。
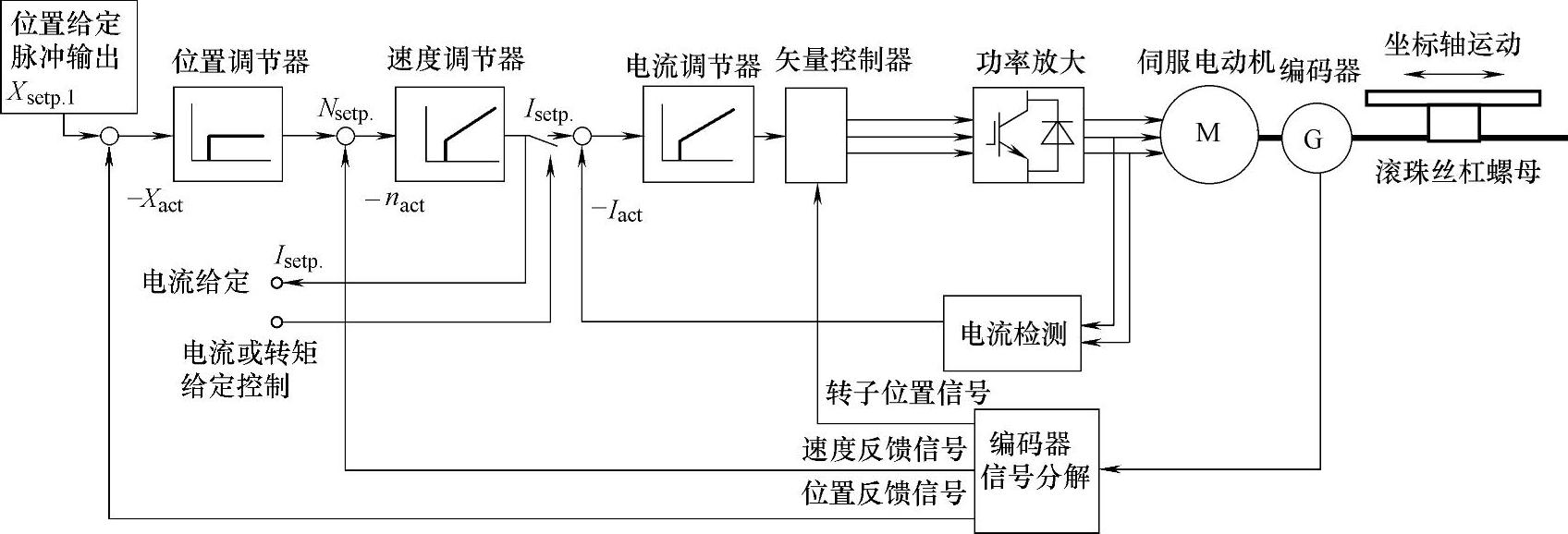
图1.2-7 半闭环系统的基本组成
半闭环驱动的结构原理如图1.2-7所示,它需要采用伺服驱动。根据交流伺服的控制需要,编码器的检测信号包含有转子位置检测信号和位置反馈信号,前者用于交流伺服驱动器的坐标变换、矢量计算和逆变管控制;后者需要反馈至CNC,它被分解为闭环速度控制用的速度反馈信号及闭环位置控制用的位置反馈信号。
在早期的交流伺服驱动系统中,也有使用霍尔元件检测转子位置、测速发电机检测速度、编码器检测位置的多检测装置结构,如SIEMENS公司的SIMODRIVE 610系列交流伺服驱动等,在这种结构的伺服系统中,编码器只提供位置反馈信号。
为了便于使用和调试,半闭环系统的编码器通常直接安装在伺服电动机内,称为内置编码器。这样的系统结构紧凑、设计简单、使用方便,且电气控制与机械传动部分间有明显的分界,机械传动系统的间隙、摩擦死区、变形等非线性环节都在闭环外,因此,系统调试容易、稳定性好,故在数控机床上得到了广泛使用。
3.全闭环系统
全闭环系统是直接检测最终控制量的闭环伺服驱动系统。直线运动轴的检测通常采用光栅;回转轴的检测通常采用直接检测编码器。
以直线轴为例,全闭环系统的基本组成如图1.2-8所示。其机床运动部件上,安装了检测直线位移的光栅,检测信号是坐标轴真实的位置与速度。因此,从理论上说,这样的系统其控制精度仅取决于检测装置本身的精度,它可对机械传动系统的间隙、摩擦死区、变形等进行自动补偿。
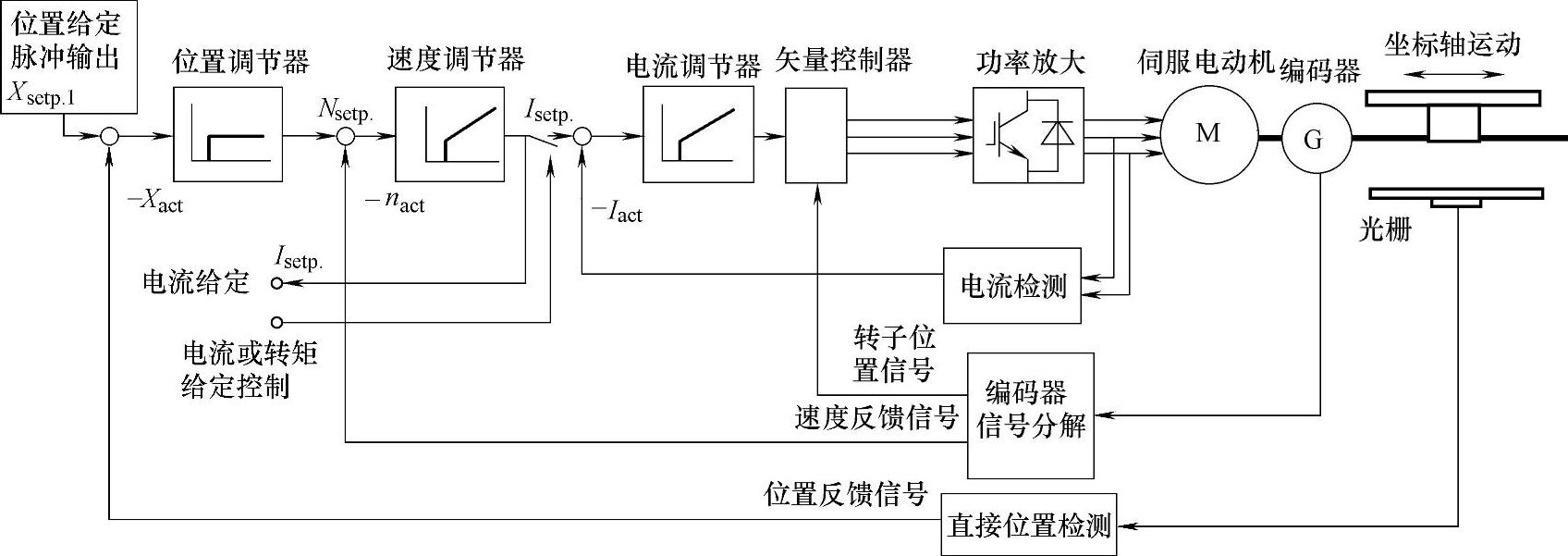
图1.2-8 全闭环系统的基本组成
全闭环系统的结构,决定了它对传动系统的精度、刚性要求比半闭环系统更高,机械传动部件的刚度、间隙和导轨的爬行、摩擦死区等非线性因素,将直接影响系统的稳定性,严重时甚至产生振荡。
为了解决以上问题,现代数控机床正在尝试采用直线电动机作为执行元件,采用直线电动机驱动的系统,理论上可完全取消将旋转运动变为直线运动的机械传动部件,实现所谓的“零传动”,从而从根本上消除机械传动部件精度、刚度、间隙的影响,获得比传统进给系统更高的精度和速度。
有关FANUC-0iD编程与操作的文章

机电一体化的伺服控制系统的结构类型繁多,但从自动控制理论的角度来分析,伺服控制系统一般包括控制器、功率放大器、执行机构、检测装置四部分。图4-4给出了伺服系统组成原理框图。①系统精度:伺服系统精度指的是输出量复现输入信号要求的精确程度,以误差的形式表现,可概括为动态误差、稳态误差和静态误差3个方面。......
2023-06-23

采用直流伺服电动机作为执行元件的伺服控制系统,称为直流伺服系统。直流伺服电机驱动控制方式直流伺服电机为直流供电,为调节电机转速和方向,需要对其直流电压的大小和方向进行驱动控制。脉冲宽度调制直流调速驱动系统原理如下式所示。1)PWM变换器基本原理脉宽调制型功率放大电路的基本原理是:利用大功率电器的开关作用,将直流电压转换成一定频率的方波电压,通过对方脉冲宽度的控制,改变输出电压的平均值。......
2023-06-23

对火炮随动系统来说,低速不平稳将导致不能准确地跟踪目标。测量元件不工作在死区,这时,系统处于开环状态。应该尽量使伺服系统工作在线性区,同时保证系统响应快速、平稳。其中,坦克减速器齿轮的啮合间隙是一种不可忽视的非线性因素。......
2023-06-24

3)原理误差是由系统结构和位置控制器参数决定的,可以根据系统开环传递函数和位置信号性质分析。表7.4 位置伺服控制系统的典型输入信号从位置伺服控制系统传递函数包含的积分环节区分,伺服系统可以分为0型系统、Ⅰ型系统和Ⅱ型系统。......
2023-06-19

电液伺服控制系统是以液压为动力,采用电气方式实现信号传输和控制的机械量自动控制系统。下面就以电液位置伺服控制系统为例,简要介绍一下电液伺服系统的组成和原理。电液伺服阀的作用是将小功率的电信号转换为阀的运动,以控制流向液压动力机构的流量和压力。电液伺服系统主要由电信号处理部分和液压的功率输出部分组成。图4-21电液伺服控制系统②反馈测量元件:测量系统的输出并转换为反馈信号。......
2023-06-23
EtherCAT系统适合小数据量通信,系统实施成本低,在I/O级可以方便地实现与Internet的通信。EtherCAT采用主/从式构架。EtherCAT主设备由带有两个以太网端口的实时控制器构成。EtherCAT协议可以包括几个EtherCAT报文。形象地描述EtherCAT应用系统中数据传输的过程。设想以太网的数据帧就像行驶中的火车,EtherCAT报文是每节火车车厢,需要传输和处理的数据是车厢内的乘客,数据可以被提取出来或插入到合适的从设备中。......
2023-08-29

YL-335B需要设置的伺服参数不多,只在前面板上进行设置就行。伺服系统的参数设置应满足控制要求,并与PLC的输出相匹配,如表2-13所示。......
2023-06-15
相关推荐