在工业环境中使用的计算机控制系统,除去被控对象、检测仪表和执行机构外,其余部分称做“工业控制计算机”,简称“工业控制机”或“工控机”。早在20世纪80年代初期,美国AD公司就推出了类似IPC的MAC-150工控机,随后美国IBM公司正式推出工业个人计算机IBM7532。......
2025-09-29
下面介绍几种常用的电动机控制电路。
1.起动控制
(1)直接起动 直接起动又称全压起动,就是通过开关(闸刀铁壳开关)或接触器,将额定电压直接加到定子绕组上使电动机起动,如图5-12所示。
(2)星-三角起动 凡正常运行时定子绕组为三角形接线的异步电动机,都可采用星-三角起动方法,如图5-13所示。起动时,先合上开关QS1,使电动机三相绕组U1、V1、W1接入三相电源。将开关QS2的动片合到下方“起动”位置,此刻电动机绕组的U2、V2、W2接在一起,使电动机接成星形起动。当电动机达到一定转速后,再将开关QS2的动片迅速合到上方“运行”位置,使三相绕组改接成三角形进入正常运行。因为星形联接起动时,加到每相绕组的电压为线电压(即电动机接成三角形时的额定电压)的1/3,因此属减压起动。
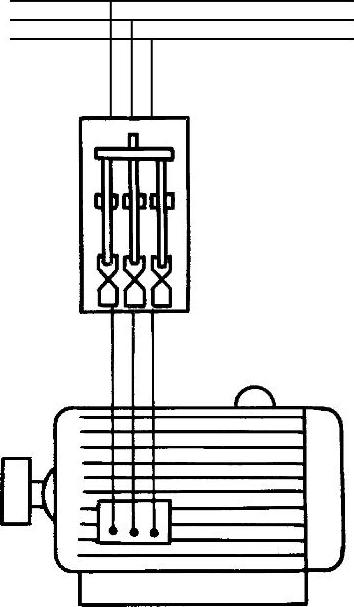
图5-12 三相异步电动机直接起动
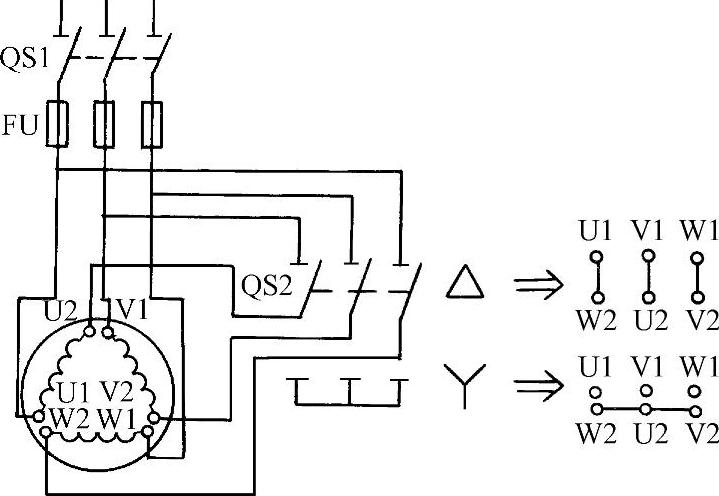
图5-13 星-三角起动原理图
图5-14所示为电动机星-三角起动的自动控制线路。它在电动机起动过程中,自动进行定子绕组的星形联结向三角形联结的转变。线路的动作过程分析如下:先合上三相开关QS→使主电路和控制电路通电。

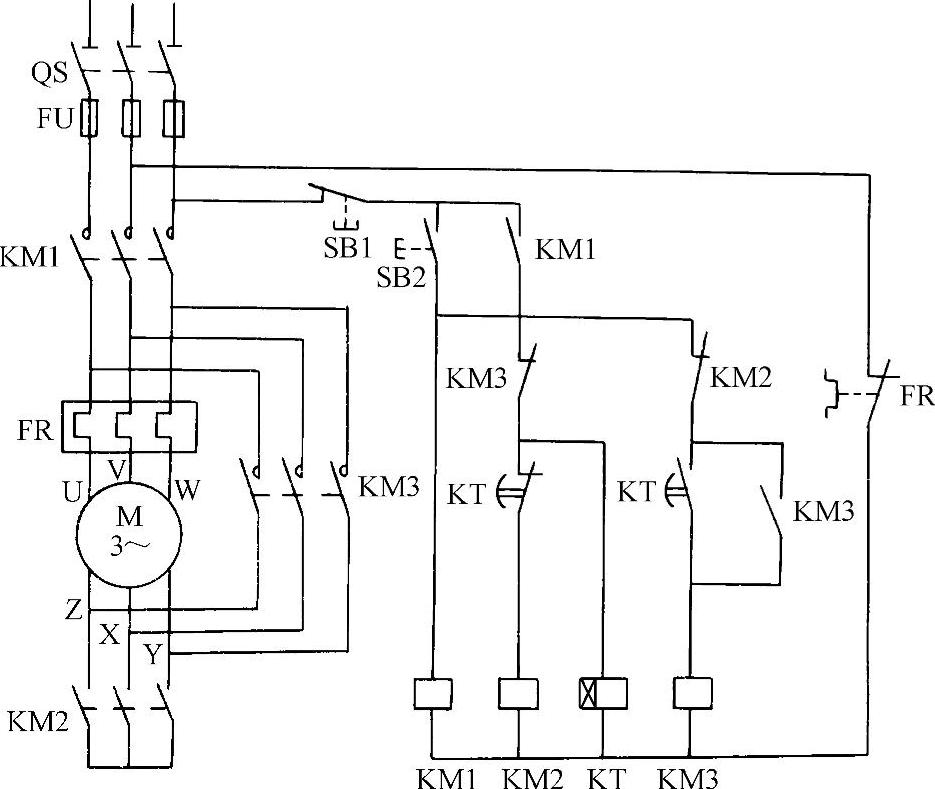
图5-14 星-三角起动的自动控制线路
(说明:⊕表示线圈得电;Θ表示线圈失电;+表示触点闭合;-表示触点断开)
按SB1→控制电路断开→主电路分断→电动机停止转止,图中FR为热继电器。
2.正反转控制(https://www.chuimin.cn)
图5-15a为接触器互锁正、反转控制线路。其正向接触器KM1和反向接触器KM2不得同时工作,否则主触头将使电源短路,所以具有互锁保护。但这种控制线路在电动机正转过程中若要求反转,则必须先按停止按钮SB1,让互锁触头KM1闭合后,才能按反转起动按钮SB2使电动机反转,故给操作带来不便。图5-15b是按钮和接触器双重互锁的正、反转控制线路。该控制线路工作过程如下:
起动:合上电源开关SA→主电路和控制电路都接通电源。
停止:按SB1→控制电路全部失电,各元件都恢复常位,电动机停转。
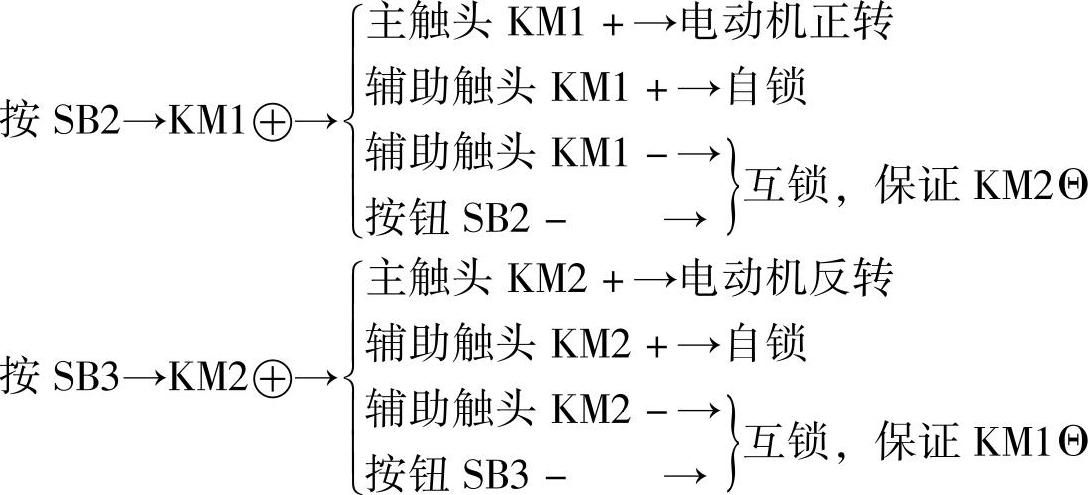
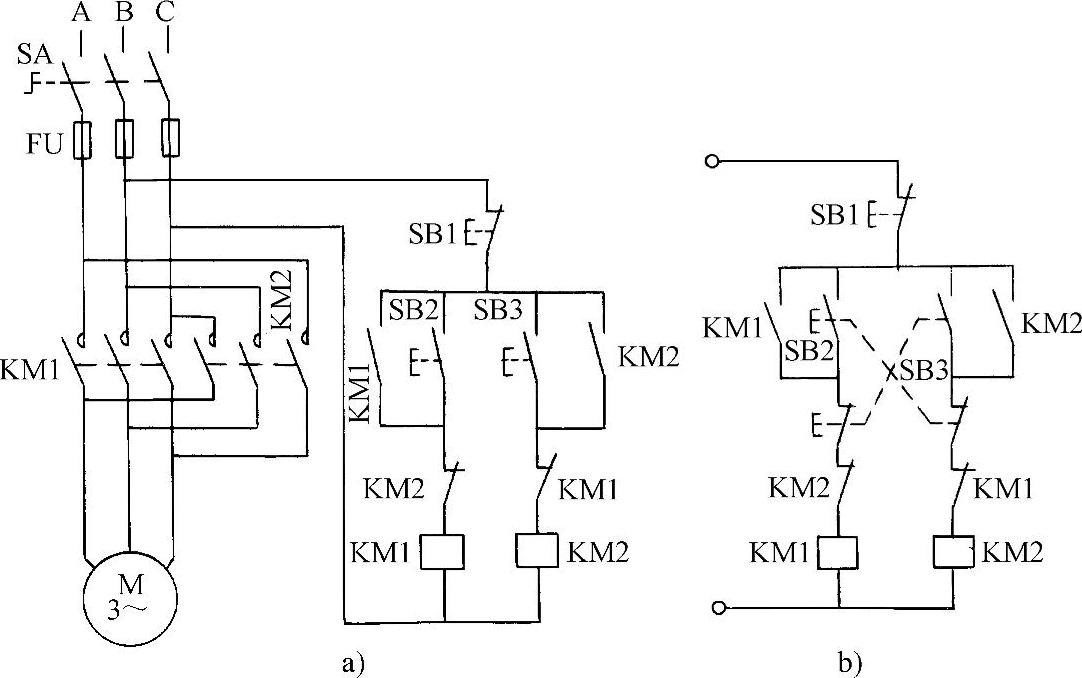
图5-15 电动机正、反转控制线路
3.行程与时间控制
(1)行程控制 某些生产机械,如万能铣床要求工作台在一定距离内能自动循环,以便对工件连续加工。图5-16a所示电路为行程开关起自动循环作用的控制线路。将行程开关SQ1和SQ2的常闭触头分别串接在正转和反转控制电路中,但SQ1和SQ2的常开触头分别并接在正转按钮SB2和反转按钮SB3两端。
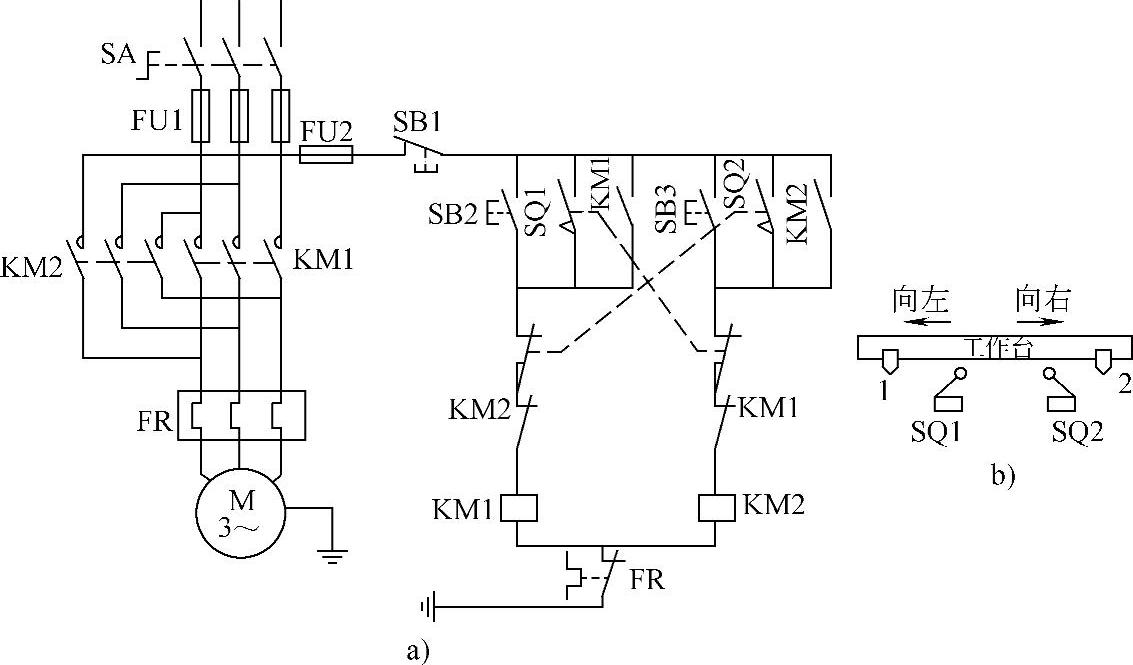
图5-16 自动循环控制线路
图5-16b是行程开关位置图。当电动机正向转动(它带着工作台向右移动),当达到预定位置时,安装在工作台侧面的撞块,压下行程开关SQ1,使SQ1的常闭触头断开,接触器线圈KM2失电。同时行程开关SQ1的常开触头闭合,使接触器线圈KM1通电,KM1辅助常开触头闭合自锁,主触头KM1闭合电动机反转,使工作台左移。撞块1离开行程开关SQ1,SQ1复位,准备下次动作。当工作台左移到另一预定位置时,撞块2压下SQ2,使SQ2的常闭触头断开,接触器线圈KM1失电。同时,行程开关SQ2的常开触头闭合,使接触器线圈KM2通电,KM2辅助常开触头闭合自锁。主触头KM2闭合,电动机从反转改为正转,工作台右移,这样工作台作周期性自动循环。直接按下停止按钮SB1,电动机停止转动,工作台停止移动。
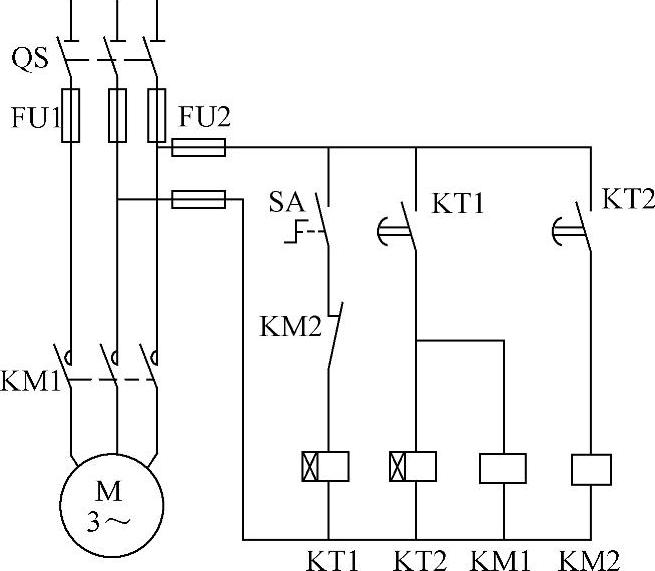
图5-17 电动机间歇运行控制线路
(2)时间控制 图5-17所示为电动机间歇运行控制线路,可使电动机以工作时间为t1,停止时间为t2的规律间歇工作。控制线路工作原理是,合上电源开关QS及普通开关SA后,电动机不会马上起动(即交流接触器KM1不会马上吸合),而要延迟一段规定的时间t2(由KT1时间继电器控制),电动机才起动,运行一定时间t1(由KT2时间继电器控制),自动停转至规定时间t2,然后又起动,如此周而复始地间歇运行。
相关文章

在工业环境中使用的计算机控制系统,除去被控对象、检测仪表和执行机构外,其余部分称做“工业控制计算机”,简称“工业控制机”或“工控机”。早在20世纪80年代初期,美国AD公司就推出了类似IPC的MAC-150工控机,随后美国IBM公司正式推出工业个人计算机IBM7532。......
2025-09-29
如图4-19所示,由于在切换完成后,要求变频器的报警输出信号能维持到操作人员采取措施之后,所以变频器内部控制电路的电源线T1和S1应接至接触器主触点之前。控制电路的工作过程如下:1.工频运行工频运行时,须将转换开关SA旋至“工”位。故障切换当变频器发生故障时,其报警输出端子KF动作。......
2025-09-29

常用的熵编码有基于图像概率分布特性的哈夫曼编码、算术编码和游程编码三类。采用哈夫曼编码时有两个问题值得注意:1)哈夫曼编码没有错误保护功能,在解码时,如果码串中没有错误,那么就能一个接一个地正确译出代码。3)重复第2)步,最后输出的“当前区间”的下边界就是该给定符号序列的算术编码。......
2025-09-29

1)补充合金元素按下式计算:3.调整合金成分的办法当核实杂质超标或在炉前分析,出现某元素含量低于或高于标准成分时,均要调整其化学成分使其达标,办法是采用补加料或冲淡两种方法。......
2025-09-29
常用的数据挖掘方法有四大类,分别对应四个问题,这四个问题是数据挖掘的基础,分别是聚类挖掘、分类挖掘、关联模式挖掘和异常值检测。1)K最近邻分类算法K最近邻分类算法可以说是整个数据挖掘分类技术中最简单的方法。目前,数据挖掘领域有大量的聚类算法。......
2025-09-29

下面举例介绍几种常用的夹点编辑方法。图3-48常见对象的夹点位置 拉伸直线。以直线的中点为夹持点进行编辑,可移动该直线;以直线的端点为夹持点进行编辑,可改变直线的长度及方向。图3-51用夹点复制图形首先指定圆的圆心为夹持点,然后按命令行提示操作:命令:** 拉伸 **指定拉伸点或 [基点/复制/放弃/退出]:_copy** 拉伸(多重)**指定拉伸点或 [基点/复制/放弃/退出]:……......
2025-09-29
在使用外部操作方式时,通过操作与控制电路端子连接的部件来控制变频器的运行。图4-14 外部操作方式的接线操作过程采用外部操作方式对电动机进行正、反转和调速控制的操作过程见表4-5。......
2025-09-29

6-5在指定位置处,画出机件的斜视图“A”。6-7补全剖视图中所缺线。6-10将零件的主视图改为全剖视图。6-11将主视图画成全剖视图,并作半剖的左视图。6-17将物体的主视图、俯视图改画成局部剖视图。6-20用单一剖切平面剖切的方法,画全剖视图,并加标注。6-27参照轴测图,在指定位置画出重合断面图。6-30在右边相应的位置画出正确的全剖视图。6-32对所给机件进行构形分析,选择适当的表达方法,完整、清晰地表达机件。......
2025-09-29
相关推荐