1)提出一种适应于大系统的建模方法,这一方法易于为用户接受,解决目前仿真中对用户建模知识要求高及技术繁琐之弊。3)本建模法提出了隐式状态方程的理论并具有相应的模型新形式,并寻求到了解决这一形式的直接代数解法,至今尚无这一数值解法。......
2025-09-29
活塞式液压缸可分为双活塞杆式液压缸和单活塞杆式液压缸。固定方式有缸体固定和活塞杆固定两种。其图形符号如图4-15所示,图4-15a为双活塞杆式液压缸,图4-15b为单活塞杆式液压缸。
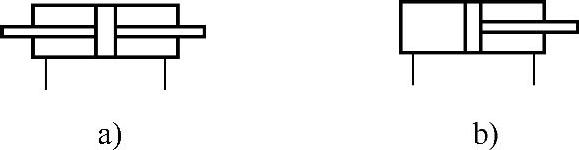
图4-15 活塞式液压缸的图形符号
a)双活塞杆式液压缸 b)单活塞杆式液压缸
1.双活塞杆式液压缸
双活塞杆式液压缸的结构如图4-16所示。其活塞的两端都有伸出杆,缸体6通过端盖8固定在床身上,活塞杆7用螺母10与工作台支架9联接。油液经孔a(或孔b)、导向套3的环形槽和端盖上部的小孔进入或流出液压缸。当液压缸的左腔进压力油,右腔回油时,活塞5带动工作台向右运动;反之,活塞带动工作台向左运动。由于活塞杆只受拉力,因此直径可以做得比较细。压盖1压紧V形密封圈2来保证活塞杆处的密封,这种密封接触面较长,密封性能较好,但摩擦力较大,装配时不能将压盖压得过紧。密封纸垫4可防止油液从缸体与端盖的结合面处泄漏。
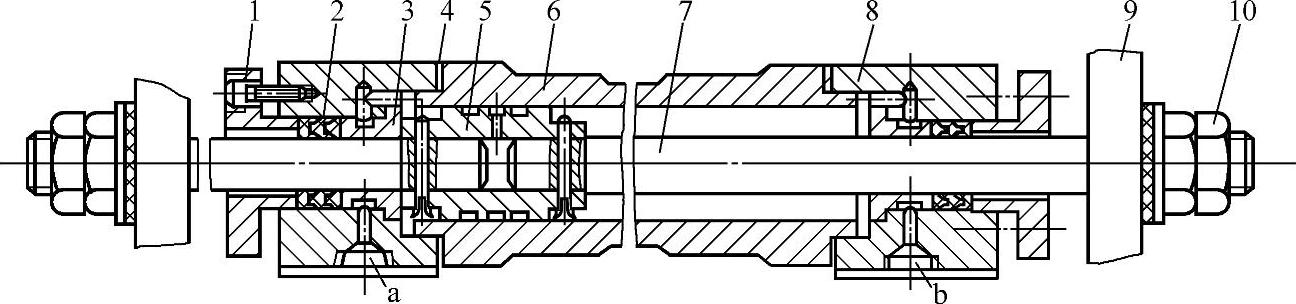
图4-16 双活塞杆式液压缸的结构
1—压盖 2—密封圈 3—导向套 4—纸垫 5—活塞 6—缸体 7—活塞杆 8—端盖 9—支架 10—螺母
当活塞杆直径相同,缸内两腔的油压力和流量相等时,活塞(或缸体)两个方向的运动速度和推力也都相等。即
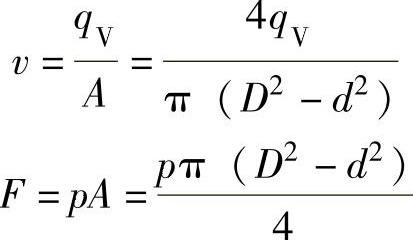
式中 A——液压缸有效工作面积;
F——液压缸的推力;
v——活塞(或缸体)的运动速度;
p——进油压力;
qV——进入液压缸的流量;
D——液压缸内径;
d——活塞杆直径。
这种液压缸常用于要求往复运动速度和负载相同的场合,如各种磨床。
双活塞杆式液压缸有两种安装方式:一种是活塞杆固定,见图4-17a,缸体和工作台连接在一起。这种结构的液压缸其活塞杆通常设计成空心,油液通过活塞杆的轴向孔进入缸体内,其驱动工作台的运动范围约等于液压缸有效行程的两倍,占地面积较小,常用于大、中型机床和其他设备上。
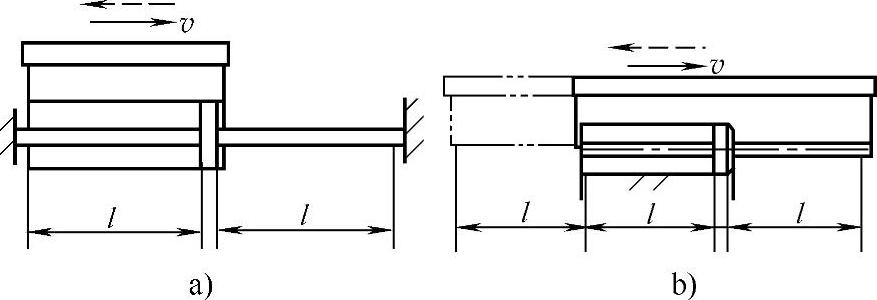
图4-17 液压缸的运动范围
另一种是缸体固定,见图4-17b。活塞杆和工作台连接,这种结构的活塞杆为实心杆,其驱动工作台运动的范围约等于液压缸有效行程的3倍,占地面积较大,一般只适用于小型机床。
2.单活塞杆式液压缸(https://www.chuimin.cn)
单活塞杆式液压缸的结构见图4-18所示。单活塞杆式液压缸仅在缸的一侧有活塞杆,因此两腔的有效作用面积不相等。活塞杆的直径越大,两腔有效面积之差也越大,即使左右两腔的供油压力和流量皆相等,活塞往复运动速度和推力也不相等。
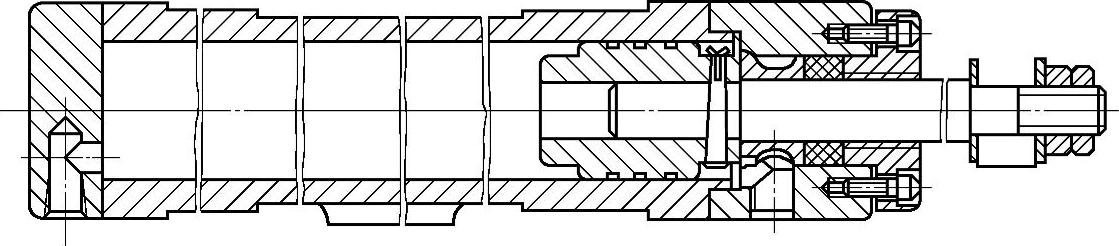
图4-18 单活塞杆式液压缸的结构
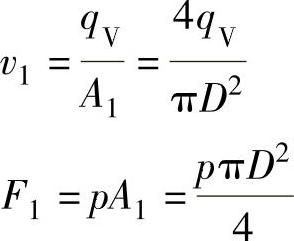
当无杆腔进压力油,有杆腔回油(图4-19a)时,活塞的运动速度v1和推力F1分别为
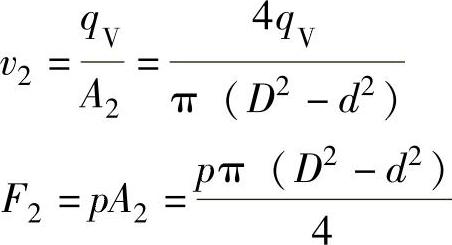
当有杆腔进压力油,无杆腔回油(图4-19b)时,活塞的运动速度v2和推力F2分别为
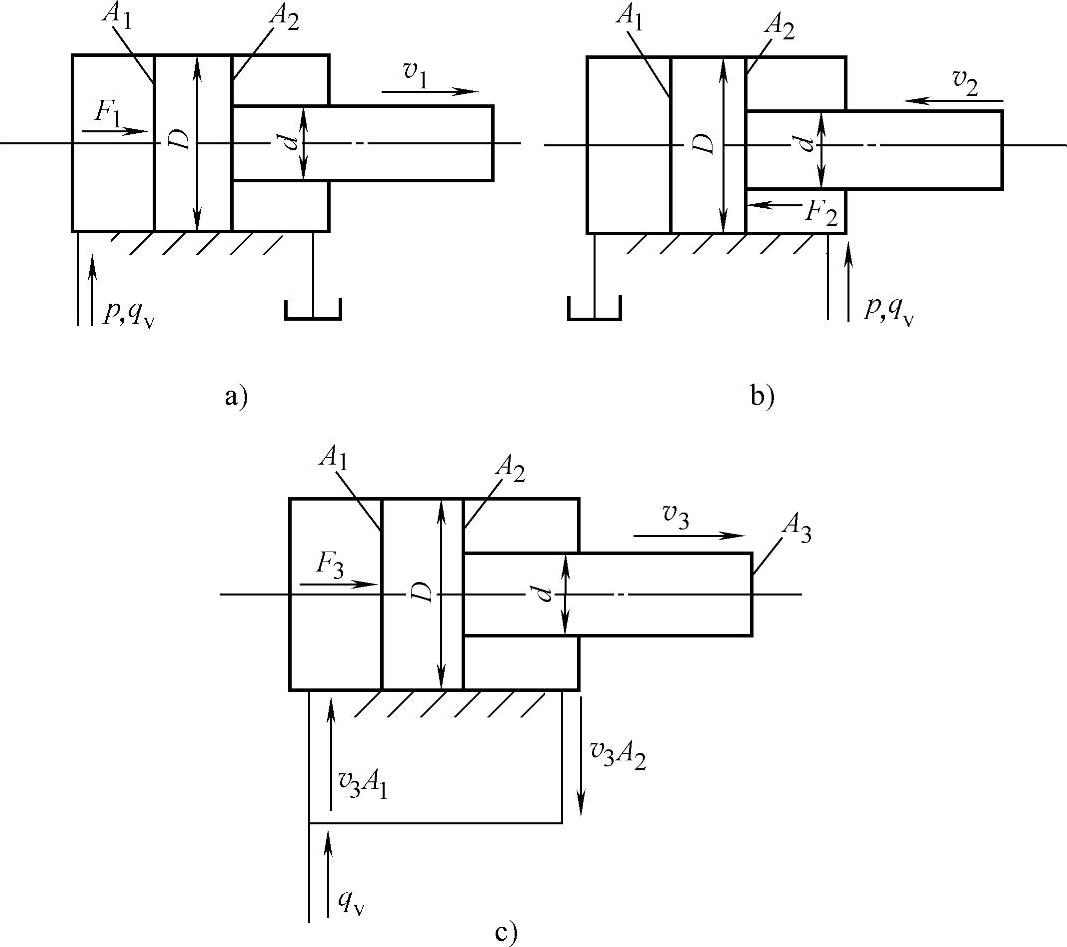
图4-19 单杆液压缸
式中 A1——缸无杆腔有效工作面积;
A2——缸有杆腔有效工作面积。
由上述公式可知,无杆腔进油时,有效工作面积大,推力大,速度小;有杆腔进油时,有效工作面积小,推力小,速度大。因此,单活塞杆式液压缸常用于一个方向有较大负载但运动速度较低,另一个方向为空载快速退回运动的设备上。
单活塞杆式液压缸,不论是缸体固定,还是活塞杆固定,其运动范围均为液压缸有效行程的两倍左右。
当无杆腔和有杆腔同时通压力油(图4-19c)时,这种连接方式称为差动连接。由于无杆腔工作面积比有杆腔工作面积大,活塞向右的推力大于向左的推力,故其向右移动。
设活塞的运动速度为v3,则无杆腔的进油量为v3A1,有杆腔的出油量为v3A2,因而有下式
v3A1=qV+v3A2
故
式中 A3——差动连接时缸的有效工作面积,即活塞杆的截面差动连接时的推力

由此可知,同一液压缸差动连接时的速度v3大于非差动连接时的速度v1;同一液压缸差动连接时的推力F3小于非差动连接时的推力F1。
在实际生产中,单活塞杆式液压缸常用在需要实现“快进—工进—快退”工作循环的组合机床液压传动系统中,并且要求“快进”与“快退”的速度相等,即v3=v2,则D=2d(或d=0.7D)。
相关文章

1)提出一种适应于大系统的建模方法,这一方法易于为用户接受,解决目前仿真中对用户建模知识要求高及技术繁琐之弊。3)本建模法提出了隐式状态方程的理论并具有相应的模型新形式,并寻求到了解决这一形式的直接代数解法,至今尚无这一数值解法。......
2025-09-29

设在物体上作用有平面一般力系F1,F2,…,F′n可合成为一个作用于O点的力R′,并称为原力系的主矢[图4-5],即图4-5力系的简化求主矢R′的大小和方向,可应用解析法。由于主矢等于原力系各力的矢量和,因此主矢R′的大小和方向与简化中心的位置无关。......
2025-09-29

图3.11 为一双作用单活塞杆液压缸,它主要由缸体10、活塞5、活塞杆15、缸底1 和缸盖13 等组成。2)差动液压缸单活塞杆液压缸的往复运动速度和两个方向的牵引力均不相同。图3.13单活塞杆液压缸运动所占空间图3.14差动连接的单活塞杆液压缸虽然差动液压缸两腔油压力相同,但活塞有效作用面积不同,有杆腔小,无杆腔大,所以两侧总液压力不能平衡,活塞杆要向外伸出。......
2025-09-29

本节只介绍定值减压阀。图4-21b所示为先导式减压阀的图形符号,图4-21c所示为先导式减压阀的简化图形符号。图4-21 先导式减压阀1—阀体 2—主阀芯 3—主弹簧 4—阀座 5—先导锥阀 6—阀盖 7—调压弹簧 8—调压螺帽2.减压阀的特点减压阀工作特性 理想的减压阀在进口压力、流量发生变化时,其出口压力总是恒定不变的。......
2025-09-29

电感式接近开关是利用电涡流效应制造的传感器。图2-4电感式接近开关工作原理及图形符号电感式接近开关工作原理;图形符号常见的电感式接近开关的外形有圆柱形、螺旋形、长方形和U形等几种。输送单元的原点开关则采用长方体电感式接近开关,如图2-5所示。在接近开关的选用和安装中,必须认真考虑检测距离、设定距离,保证生产线上的传感器可靠动作。......
2025-09-29

工业机器人是自动执行工作的机器装置,是靠自身动力和控制能力来实现各种功能的一种机器。图7-9水下机器人工业机器人按程序输入方式区分有编程输入型和示教输入型两类。示教输入程序的工业机器人称为示教再现型工业机器人。如果具有识别功能或更进一步增加自适应、自学习功能,即成为智能型工业机器人。......
2025-09-29

从顶部抓取称为力锁抓取,因为由加速度引起的剪切力或在工件上施加的水平力通过贴合摩擦传递。图3.20负压产生抓取力的原理图3.21真空抓取的部件当从下方抓住产品时,工件仅在重力作用下保持在抓取表面上。反向抓取可用于许多应用,因为它通常为产品提供最温和的抓取方法。图3.26用于抓取放置并带有传送带技术的反向抓取机械手吸附式和反向抓取机械手的这些示例足以证明抓取技术的多样性。......
2025-09-29

相关推荐