故小偏心压弯构件的最终破坏多属于压屈破坏。破坏机理重组竹压弯构件的破坏呈非线性渐进破坏特性。图6-20压弯构件的塑性变形及截面应变分布示意图因此,梁—柱的最大挠曲变形可看成由两部分组成:由极限荷载Pu产生的理想弹性位移δe;外荷载保持不变,由塑性铰转动产生的塑性变形δp。......
2023-10-12
螺旋机构由螺杆、螺母和机架组成,它能将旋转运动转变为直线运动。螺旋副为滑动摩擦的螺旋机构,称为滑动螺旋机构。滑动螺旋机构所采用的螺纹为矩形螺纹、梯形螺纹和锯齿形螺纹。它们具有结构简单、工作连续、平稳、传动精度高,承载能力大,易于自锁等优点,故在机械中应用十分广泛。其缺点是磨损大,传动效率低。按螺杆上螺旋副的数目不同,滑动螺旋机构分为单螺旋机构和双螺旋机构两种类型。
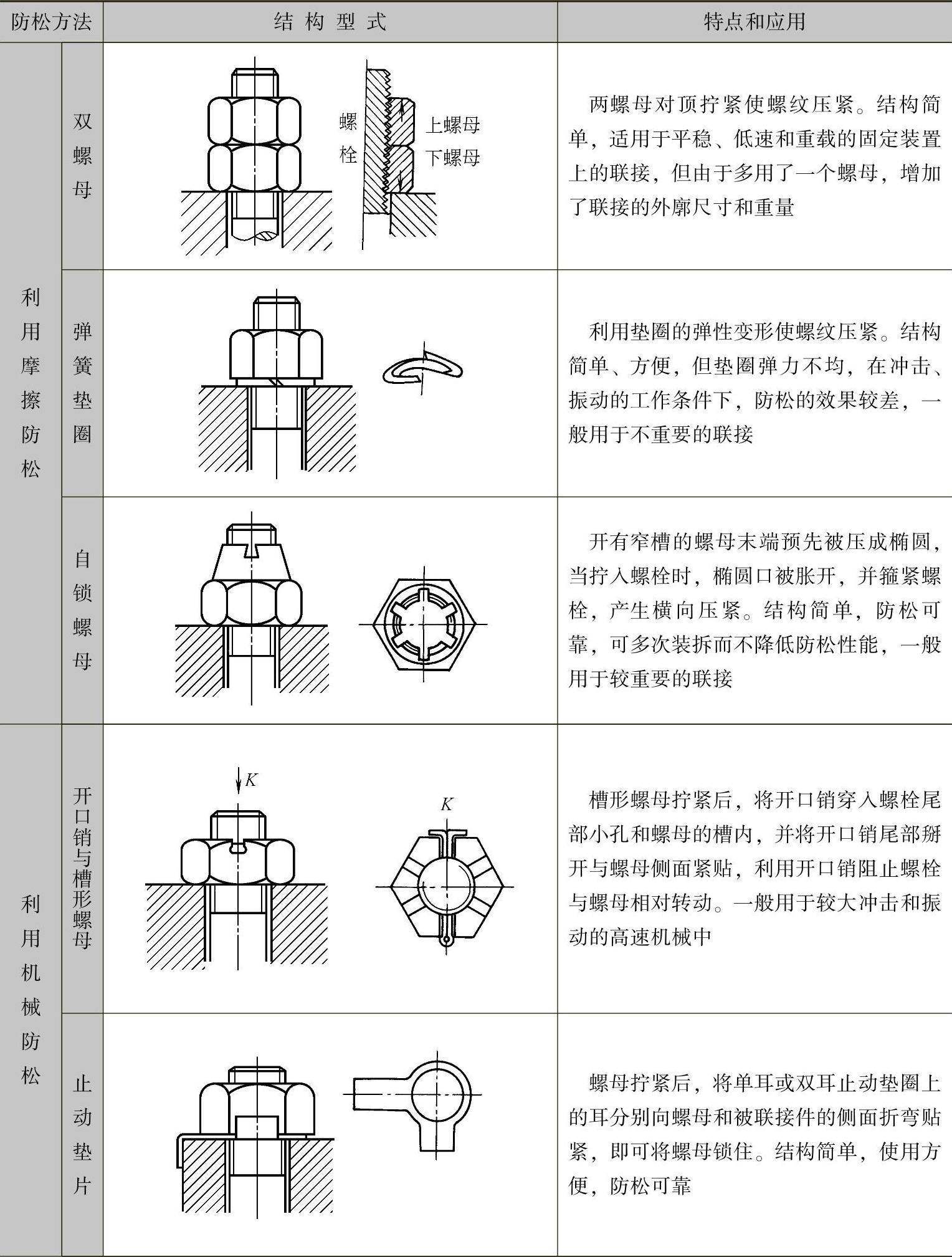
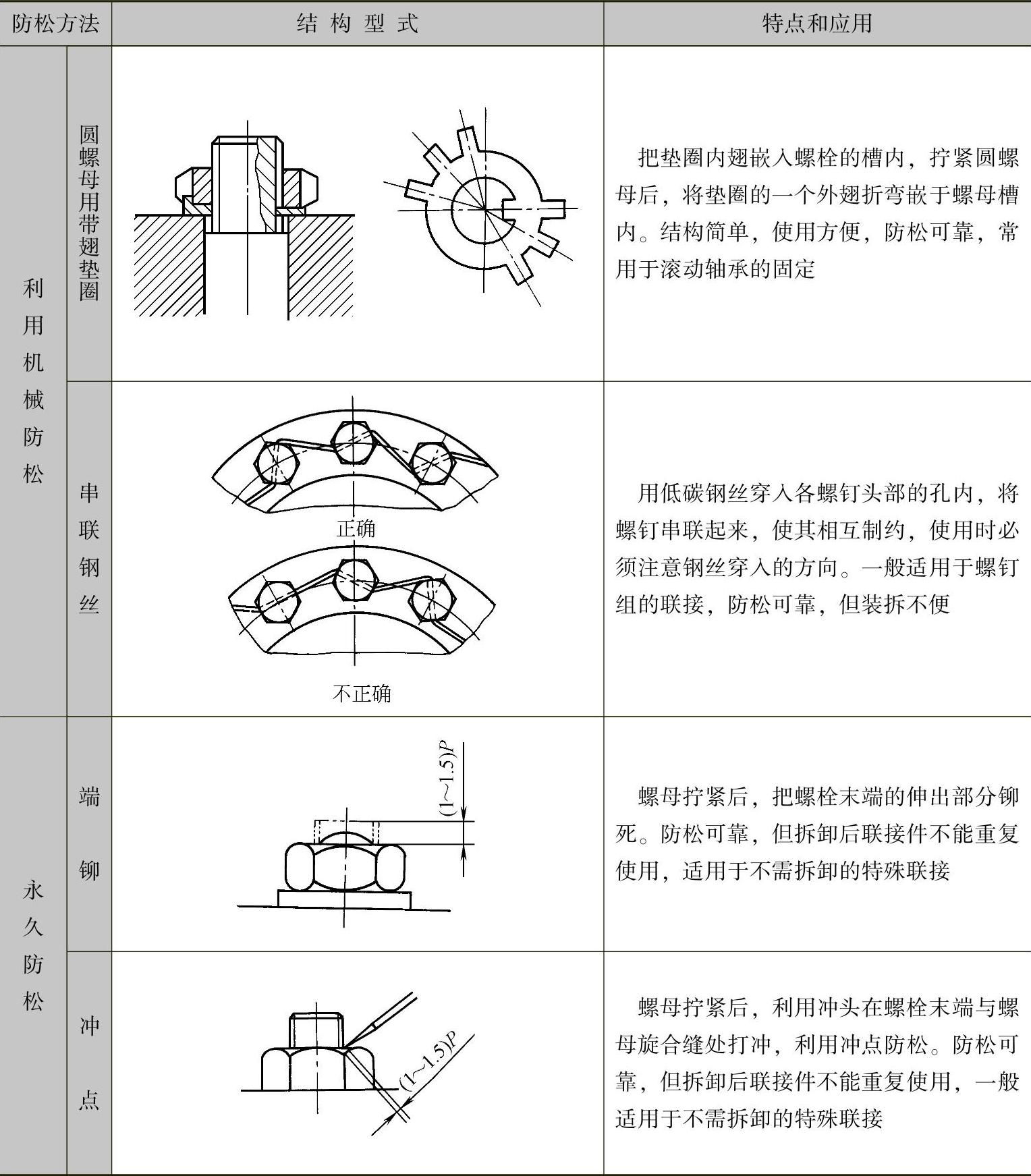
表2-4 螺纹联接常用的防松方法
(续)
1.单螺旋机构
单螺旋机构又称为普通螺旋机构,是由单一螺旋副组成的,它有以下四种形式:
(1)螺母不动,螺杆转动并作直线运动 如图2-18所示的台式虎钳,螺杆1上装有活动钳口2,螺母4与固定钳口3联接(固定在工作台上),当转动螺杆1时可带动活动钳口2左右移动,使之与固定钳口3分离或合拢。
螺母不动,螺杆转动并作直线运动的单螺旋机构,通常还应用于千斤顶、千分尺和螺旋压力机等。
(2)螺杆不动,螺母转动并作直线运动 如图2-19所示的螺旋千斤顶,螺杆1被安置在底座上静止不动,转动手柄使螺母2旋转,螺母就会上升或下降,托盘3上的重物就被举起或放下。
螺杆不动,螺母转动并作直线运动的单螺旋机构还应用在插齿机刀架传动上等。
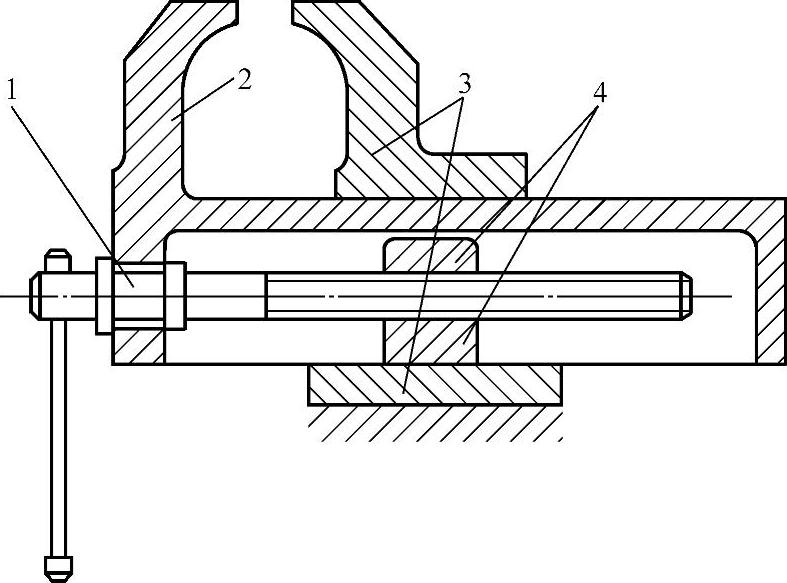
图2-18 台虎钳
1—螺杆 2—活动钳口 3—固定钳口 4—螺母
(3)螺杆原位转动,螺母作直线运动 如图2-20所示的车床滑板丝杠螺母传动,螺杆1在机架3中可以转动而不能移动,螺母2与滑板4相联接只能移动而不能转动。当转动手轮使螺杆转动时,螺母2即可带动滑板4移动。
此外,摇臂钻床中摇臂的升降机构、牛头刨床工作台的升降机构等均属这种形式的单螺旋机构。
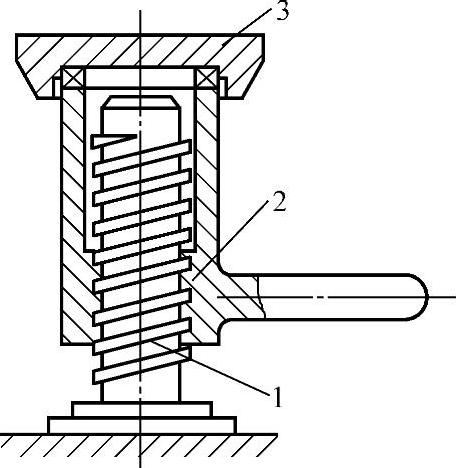
图2-19 螺旋千斤顶
1—螺杆 2—螺母 3—托盘
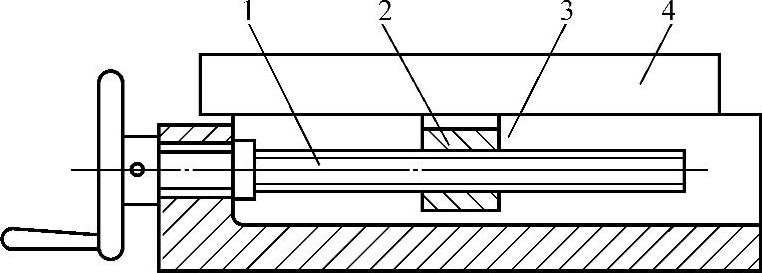
图2-20 车床滑板丝杠螺母传动
1—螺杆 2—螺母 3—机架 4—滑板
(4)螺母原位转动,螺杆直线运动 如图2-21所示应力试验机上的观察镜螺旋调整装置,由机架1、螺母2、螺杆3和观察镜4组成,当转动螺母2时便可使螺杆3向上或向下移动,以满足观察镜4的上下调整要求。
Ⅲ型游标卡尺中的微量调节装置也属于这种形式的单螺旋机构。
在单螺旋机构中,螺杆与螺母间相对移动的距离可按下式计算
L=nPZ
式中 L——移动距离(mm);
n——螺旋线数;
P——螺纹的螺距(mm);
Z——转过的圈数。
2.双螺旋机构
图2-22所示为双螺旋机构,螺杆3上有两段不同导程Ph1和Ph2的螺纹,分别与螺母1、2组成两个螺旋副。其中螺母2兼作机架,当螺杆3转动时,一方面相对螺母2移动,一方面又使不能转动的螺母1相对螺杆3移动。
按两螺旋副的旋向不同,双螺旋机构又可分为差动螺旋机构和复式螺旋机构两种形式。
(1)差动螺旋机构 两螺旋副中螺纹旋向相同的双螺旋机构称为差动螺旋机构,差动螺旋机构可动螺母1相对机架移动的距离L可按下式计算
L=(Ph1-Ph2)Z
式中 L——可动螺母1相对机架移动的距离(mm);
Ph1——螺母1的导程(mm);
Ph2——螺母2的导程(mm);
Z——螺杆转过的圈数。
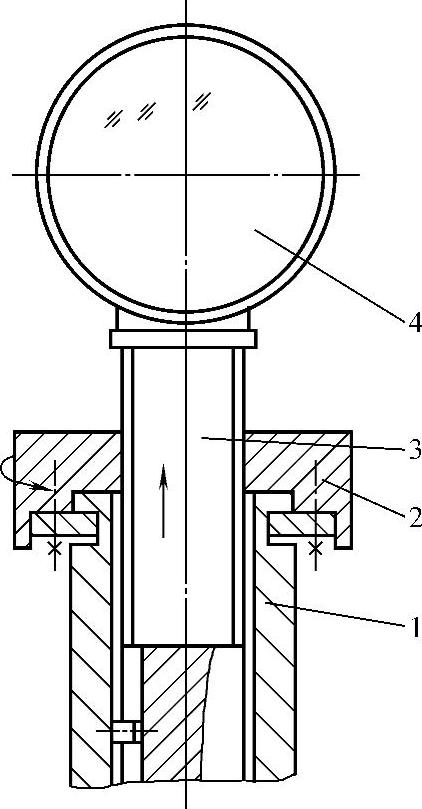
图2-21 应力试验机观察镜螺旋调整装置
1—机架 2—螺母 3—螺杆 4—观察镜
当Ph1和Ph2相差很小时,则移动量可以很小。利用这一特性,所以将差动螺旋应用于测微器、计算机、分度机,以及许多精密切削机床、仪器和工具中。
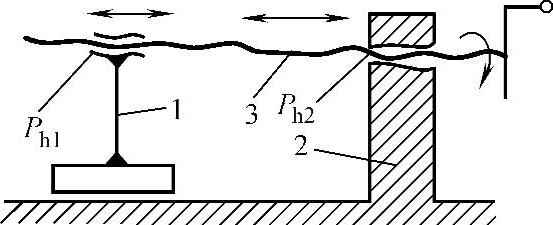
图2-22 双螺旋机构
1、2—螺母 3—螺杆
例2-1 在图2-22所示的双螺旋机构中,若Ph1=4mm,Ph2=3.5mm,两段螺旋的旋向均为右旋,问当螺杆3转过r/100时,可动螺母1移动的距离是多少?
解L=(Ph1-Ph2)Z=(4-3.5)×1/100mm=0.005mm
即当螺杆3转r/100转时,可动螺母1实际移动0.005mm。
(2)复式螺旋机构 两螺旋副中螺纹旋向相反时,该双螺旋机构称为复式螺旋机构。复式螺旋机构可动螺母1相对机架移动的距离L可按下式计算
L=(Ph1+Ph2)Z
式中 L——可动螺母1相对机架移动的距离(mm);
Ph1——螺母1的导程(mm);
Ph2——螺母2的导程(mm);
Z——螺杆转过的圈数。
因为复式螺旋机构的移动距离L与导程的和(Ph1+Ph2)成正比,所以多用于需快速调整或移动两构件相对位置的场合。在实际应用中,若要求两构件同步移动,则只需使Ph1=Ph2即可。如图2-23所示的铣床快动夹紧装置和图2-24所示的电线杆钢索拉紧装置用的松紧螺套,都是复式螺旋机构的应用。
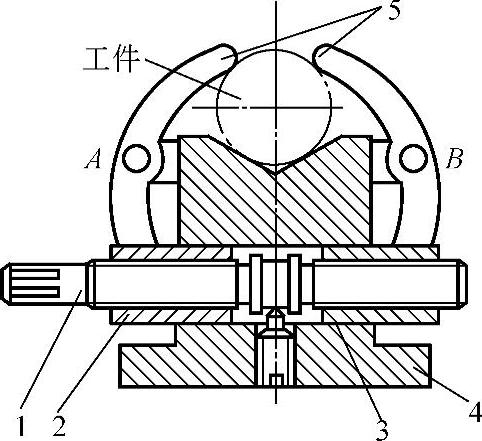
图2-23 铣床快动夹具
1—螺杆 2、3—螺母 4—机架 5—夹爪

图2-24 松紧螺套
有关机械基础:高级的文章

故小偏心压弯构件的最终破坏多属于压屈破坏。破坏机理重组竹压弯构件的破坏呈非线性渐进破坏特性。图6-20压弯构件的塑性变形及截面应变分布示意图因此,梁—柱的最大挠曲变形可看成由两部分组成:由极限荷载Pu产生的理想弹性位移δe;外荷载保持不变,由塑性铰转动产生的塑性变形δp。......
2023-10-12

角色的转换很重要在我咨询室里的两个小时,她只说了简单的几句话。也许她是幸福的,但同时她也是不幸的。在生活中,角色的转换很重要,家庭中更应该如此。然而,矛盾却常常在这个最小的社会单位中凸显出来,影响彼此的工作和心情。我们也知道克林顿和他的妻子希拉里的故事。当克林顿和莱温斯基的绯闻在全世界传开之后,希拉里永远只说,我了解你、支持你。也正是听到妻子这样的话,克林顿总统才走出了他人生的低谷。......
2023-12-07

有螺旋副连接的机构称为螺旋机构,用来传递运动和动力。当两螺旋副的旋向相同时,两螺母的运动位移变化很慢,称为差动螺旋机构,如图4-57 所示。当螺杆或螺母转动时,滚动体在螺纹滚道内滚动,摩擦状态为滚动摩擦,其摩擦损失比滑动螺旋机构小,故传动效率也比滑动螺旋机构高。在数控机床、直线电机、汽车转向、飞机起落架等机构中,滚动螺旋机构有着广泛应用。......
2023-06-26

要顺利实现这种体制转换,必须重视确立社会公正观。在此过程中,实现社会公正是执政党面临的一项重大任务。在利益体制转型期,我们党有必要通过确立“社会公正观”,来建立社会利益协调机制,以引导社会成员以理性合法的形式表达利益要求,解决利益矛盾。二是社会整体利益结构的大幅度调整不可避免。当前,在现代化和社会主义市场经济的条件下,人民群众最看重的是社会公正问题。......
2023-11-29

根据人体生理解剖结构,柔韧包括四肢和躯干各关节的柔韧。柔韧的训练就是对上述各关节灵活性的练习。在体育运动中,因项目不同对各关节活动幅度要求的程度也就不同。篮球、排球、小球项目的运动员腕部柔韧性要求较高。下肢柔韧性好,将充分发挥弹跳力以赢得空中发力的时间。可见,柔韧素质对各项运动技术的掌握和发挥具有重要的作用,其具体作用如下。防止、减少伤害事故的发生,延长运动寿命。......
2023-11-02

向机构装置中增加伺服电动机后,便可建立机构的运动分析(定义)并运行。在每个运动定义中,可选择要打开或关闭的伺服电动机并指定其时间周期,以定义机构的运动方式。可以创建多个运动定义,每个定义都使用不同的伺服电动机和锁定不同的图元。图9.5.64 “分析定义”对话框图9.5.65 “电动机”选项卡定义动画时域。在图9.5.64所示的“分析定义”对话框的区域进行下列操作:①输入开始时间:0。在图9.5.64所示的“分析定义”对话框中,单击按钮。......
2023-06-20
任务要求掌握典型间歇机构及工作原理。其工作过程与棘轮机构相似,主动棘爪2靠它与棘轮3之间产生的摩擦力来驱使棘轮作间歇运动。图2.54槽轮1—拨盘;2—槽轮图2.55内槽轮机构图2.56六角车床刀架的转位槽轮机构2.3.3不完全齿轮机构不完全齿轮机构是由渐开线齿轮机构演变而成的间歇运动机构。它属于间歇运动机构。......
2023-06-30
(一)凸轮机构的组成、功用及分类凸轮机构在纺织机械中应用相当广泛。通过凸轮运动曲线的设计,可以达到所要求的各种运动方案,并且结构紧凑。凸轮机构是主要由凸轮、从动件和机架组成。图2-23盘状凸轮机构按凸轮的形状分,凸轮可分为盘形凸轮、圆柱凸轮和移动凸轮,如图2-24 所示。(二)纺织机械中从动件运动规律的选择1.凸轮机构运动线图 从动件的运动规律是指从动件的位移、速度、加速度随凸轮转角的变化规律,如图2-25 所示。......
2023-06-16
相关推荐