扶手装置高度值是扶手装置一个最基本的结构尺寸,也是一个重要的参数,如图6-1-1所示。图6-1-2 扶手装置高度过小时人员倾覆示意图3.扶手带入口的位置1)扶手带在扶手转向端入口处的最低点与地板之间的距离h3不应小于0.10m,也不应大于0.25m。从图6-1-1上可看出,如果h3尺寸过小,则该部位容易产生类似尖角空间,容易夹物;如果h3过大,则容易产生误碰扶手带入口装置的情况,两者都具有较大的安全风险。......
2025-09-29
1.蜗杆传动的主要参数
如图1-69所示,通过蜗杆轴线并垂直蜗轮轴线的平面称为中间平面。在此平面内,蜗杆传动的啮合情况如同齿条和齿轮的啮合一样。因此,蜗杆传动的主要参数和尺寸都以此平面的参数和尺寸为基准。
(1)模数和压力角 由于中间平面既是蜗杆的轴向截面,又是蜗轮的端面,在蜗杆传动中蜗杆的轴向模数和压力角分别等于蜗轮的端面模数和端面压力角并为标准值。
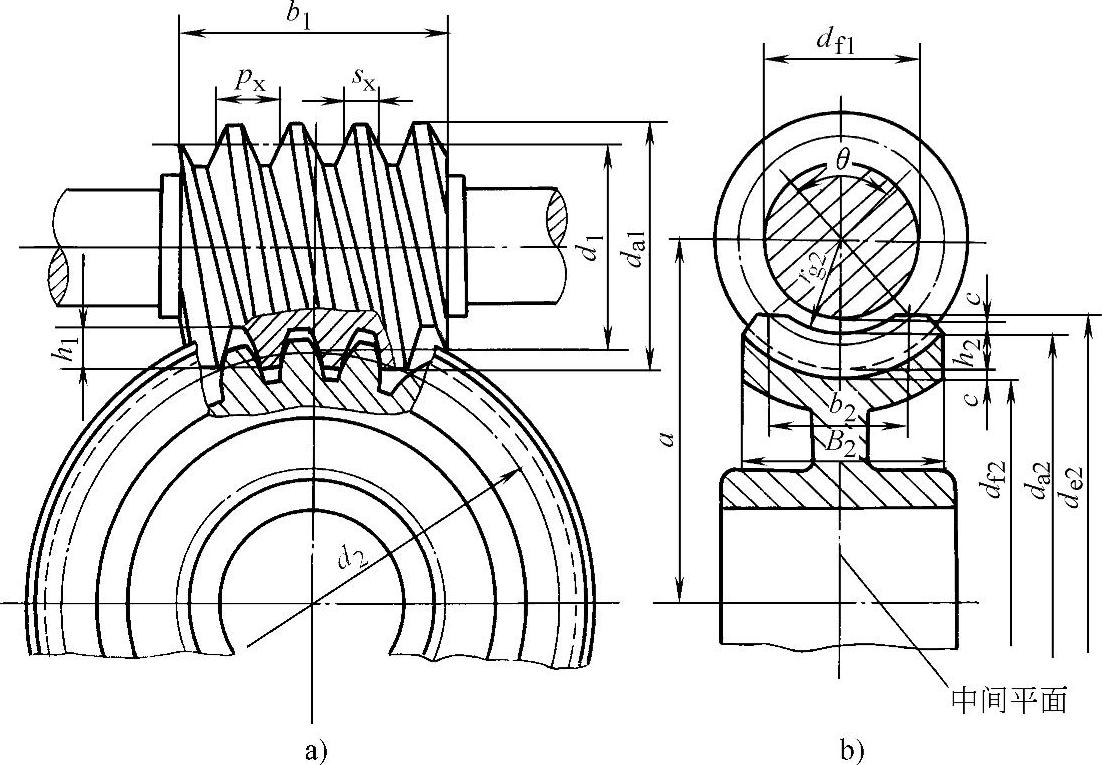
图1-69 蜗杆传动的几何尺寸
(2)蜗杆分度圆直径 为了保证蜗杆与蜗轮能正确啮合,加工蜗轮的滚刀不仅与蜗杆的模数和压力角相等,而且头数、分度圆直径也必须一样(只是滚刀外径比蜗杆稍大,以便切出蜗杆传动的顶隙)。这样就要配备许多加工蜗轮的滚刀。为了减少滚刀的数目,以利于标准化、系列化,将蜗杆分度圆直径d1定为标准值。模数m和蜗杆分度圆直径d1的搭配值见表1-8。
表1-8 圆柱蜗杆的模数m和蜗杆分度圆直径d1的搭配值 (摘自GB/T 10085—1988)
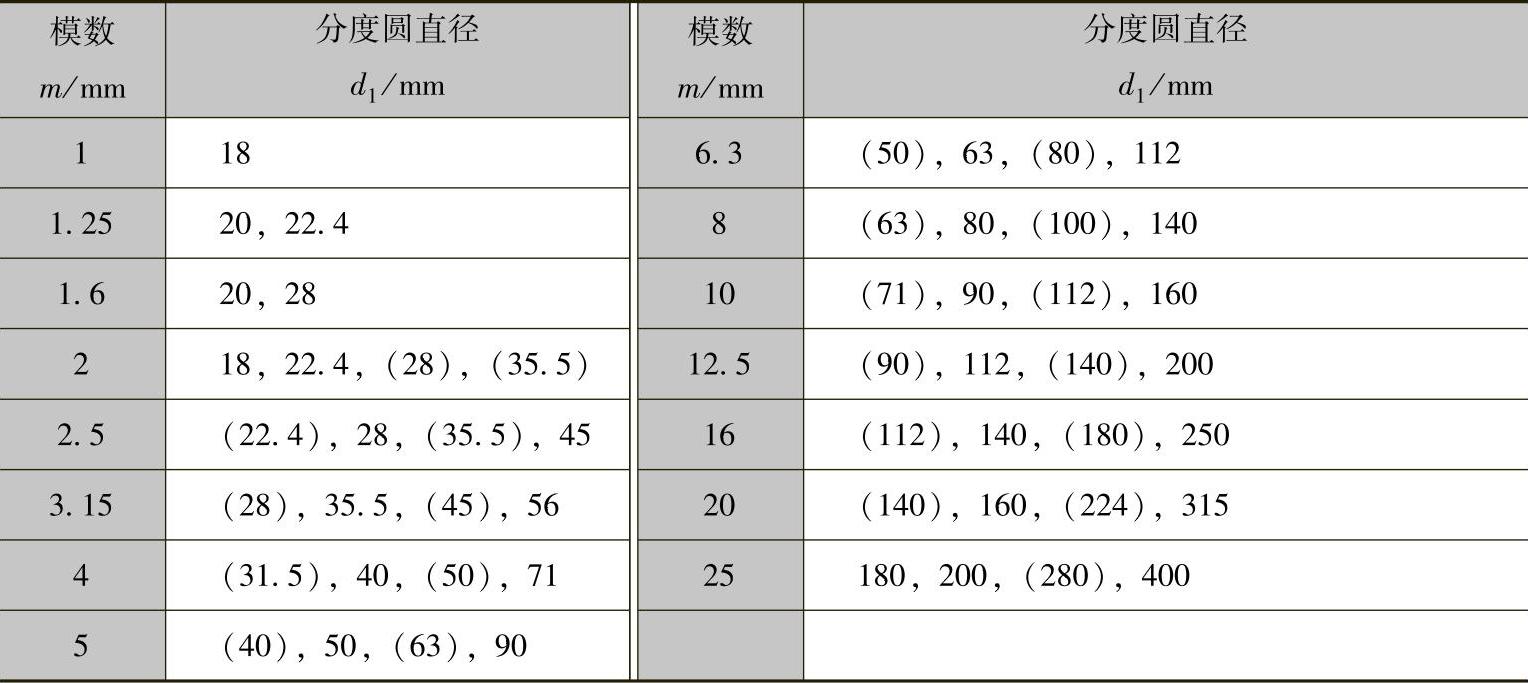
注:括号内的数字尽可能不用。
(3)蜗杆分度圆导程角 蜗杆类似一螺旋,图1-70a所示的蜗杆分度圆柱上有两根螺旋线,即z1=2,螺旋线的导程角为γ;蜗杆的轴向齿距为pa;导程ph=z1pa。若将蜗杆的分度圆柱展开,螺旋线就成了斜线,如图1-70b所示。由图可知
tanγ=z1pa/πd1=z1πm/πd1=z1m/d1
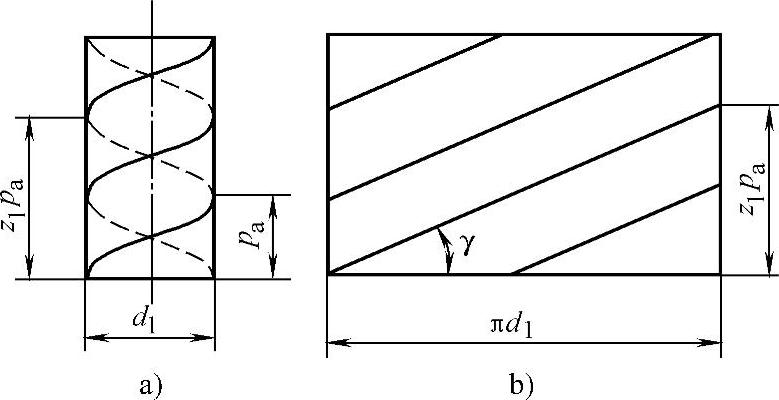
图1-70 蜗杆分度圆导程角
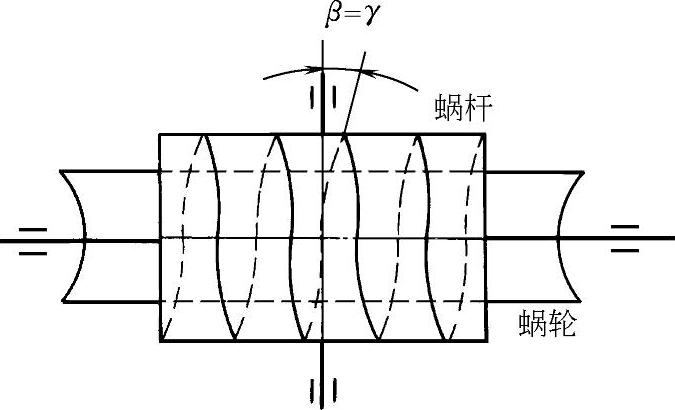
蜗轮分度圆螺旋角β与斜齿圆柱齿轮的螺旋角相似。由于一般蜗杆传动中,两轴通常在空间垂直交错,所以蜗轮螺旋角β等于蜗杆导程角γ,如图1-71所示。
 (https://www.chuimin.cn)
(https://www.chuimin.cn)
图1-71 蜗轮螺旋角与蜗杆导程角
2.蜗杆传动的正确啮合条件
在中间平面内,蜗杆的轴向模数、轴向压力角应分别等于蜗轮的端面模数、端面压力角,且均为标准值;蜗杆的分度圆导程角γ与蜗轮螺旋角β大小相等,且旋向相同。即
ma=mt=m
da=dt=d
γ=β
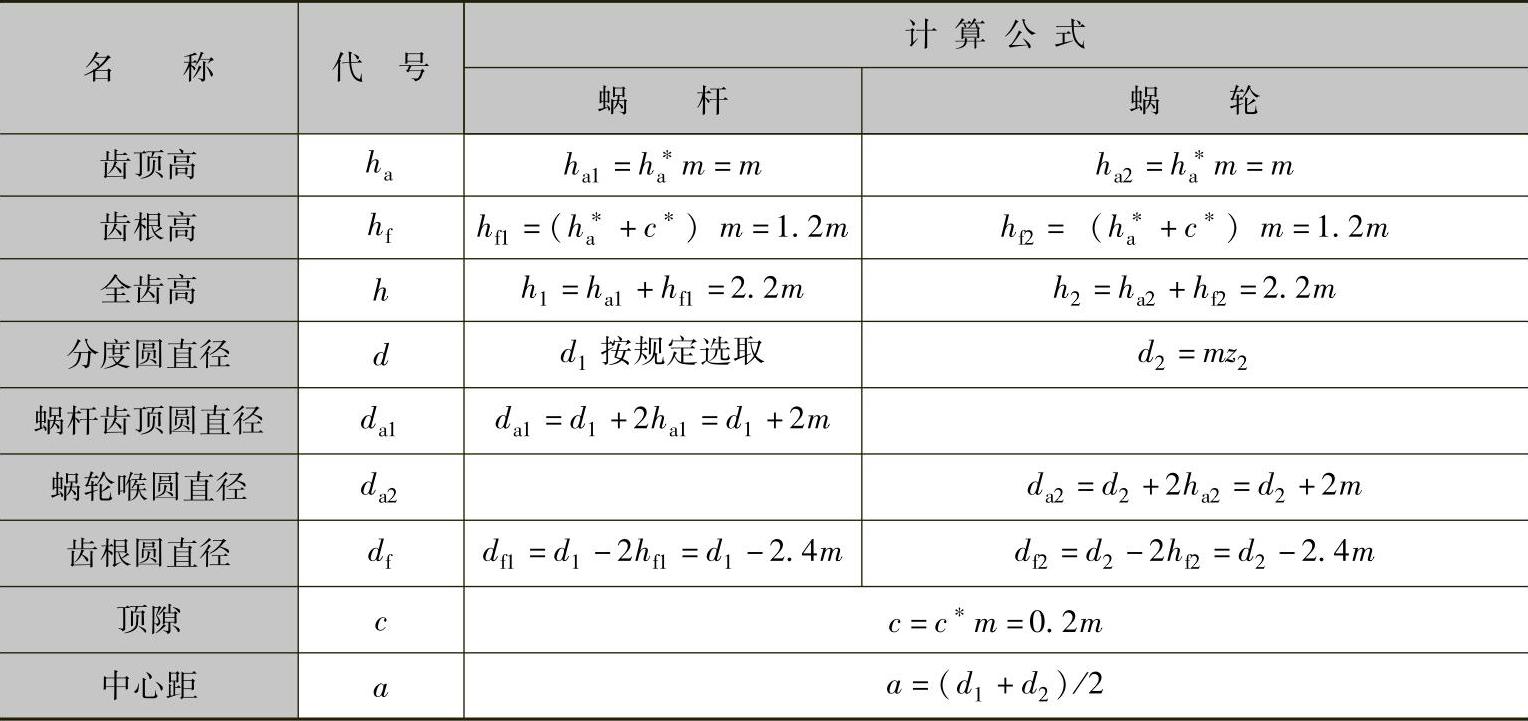
3.几何尺寸计算
蜗杆传动的基本尺寸及计算公式见表1-9。除了顶隙系数(c∗=0.2)与圆柱齿轮不同外,其余几何尺寸计算公式基本相同。
表1-9 蜗杆传动基本几何尺寸关系式 (ha∗=1,c∗=0.2)
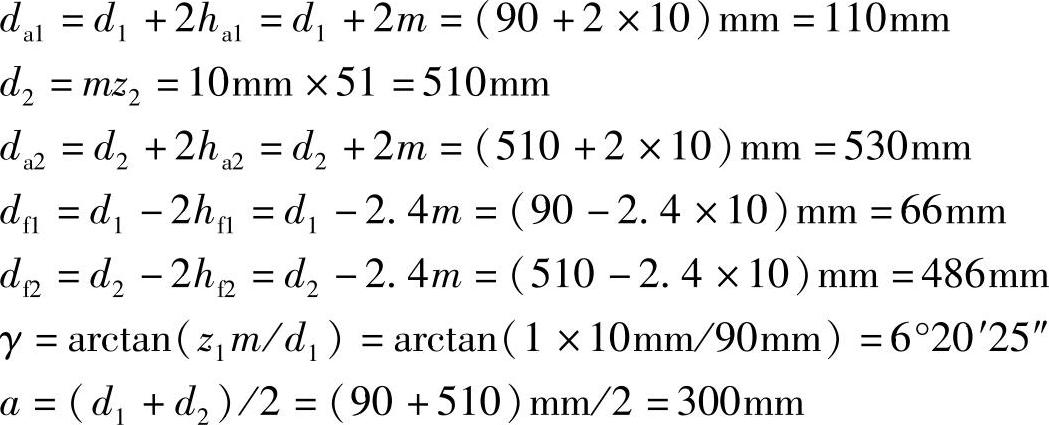
例1-6 已知一阿基米德蜗杆传动,模数m=10mm,蜗杆分度圆直径d1=90mm,蜗杆头数z1=1,蜗轮齿数z2=51,试确定该传动中蜗杆齿顶圆直径da1、蜗轮分度圆直径d2、蜗轮喉圆直径da2、蜗杆齿根圆直径df1和蜗轮齿根圆直径df2、导程角γ及中心距a。
解 由表1-9公式得
相关文章

扶手装置高度值是扶手装置一个最基本的结构尺寸,也是一个重要的参数,如图6-1-1所示。图6-1-2 扶手装置高度过小时人员倾覆示意图3.扶手带入口的位置1)扶手带在扶手转向端入口处的最低点与地板之间的距离h3不应小于0.10m,也不应大于0.25m。从图6-1-1上可看出,如果h3尺寸过小,则该部位容易产生类似尖角空间,容易夹物;如果h3过大,则容易产生误碰扶手带入口装置的情况,两者都具有较大的安全风险。......
2025-09-29

公差与配合的选择是否恰当,对产品的性能、质量、互换性与经济性都有着重要的影响。尺寸公差与配合的选择主要包括配合制、公差等级及配合种类。公差等级可采用计算法或类比法进行选择。表2-11公差等级应用范围表2-12常用公差等级应用示例3.配合种类的选用当配合制和公差等级确定后,配合的选择就是根据所选部位松紧程度的要求,确定非基准件的基本偏差代号。......
2025-09-29

实际中,风电系统控制系统的参数优化是一个随机、时变和耦合的复杂过程,传统的优化控制方法难以有效应用,而Kharitonov定理也不失为一个不错的选择,目前在风电系统中应用还较少。......
2025-09-29

当数控机床的进给部分发生故障时,维修人员便需要对伺服进给参数进行设定和调整,甚至执行伺服进给参数的初始化。8)机床伺服轴切削进给和快速移动的速度。图5-118 FANUC系统伺服数据加载过程1.伺服进给参数的设定伺服进给参数设定的条件1)确定CNC单元的类型及相应软件(功能),是FANUC 0C/0D系统、FANUC 16/18/21/0iA系统、FANUC 16i/18i/21i/0iB/0iC系统还是FANUC 0iD/30i/31i/32i系统。图5-120 进给伺服画面3)进给伺服画面下的伺服参数设定子画面。......
2025-09-29
自动扶梯的规格参数由速度、梯级名义宽度和提升高度三个数据组成,它决定了自动扶梯的工作能力。但需要指出的是,GB 16899—2011没有规定自动扶梯的额定载荷如何计算。因此,额定速度目前也没有确定的测量方法,只是GB 16899—2011上的一个名词。GB 16899—2011规定梯级的宽度应在0.58~1.1m。这个尺寸包含了0.60m、0.80m、1.00m三种标准规格的梯级标称宽度。在标称宽度一样的情况下,不同品牌扶梯的实际梯级宽度会略有不同,但一般都在规定的范围之内。......
2025-09-29

在几何量计量领域内,测量基准包括长度基准和角度基准。图3-1是国家标准规定的长度量值的传递系统,通过线螺纹和量块这两个主要媒介把基准波长向下传递,传递的媒介不同,基准要求也不相同。在实际应用中,为了测量方便,角度基准的实物基准常采用特殊合金钢和石英玻璃制成的多面棱体,并建立了角度量值的传递系统。图3-4所示为角度量值传递系统。量块主要用作尺寸传递系统中的中间标准量具,或作为标准件调整仪器的零位。......
2025-09-29

滤料耐腐蚀的尺度,可用浓度为1%的Na2SO4水溶液,将恒重后滤料浸泡28d,重量减少俊以不大于1%为宜。日本为去除二级出水中的悬浮物,无烟煤有效粒径采用1.6~2.0mm,无烟煤的有效粒径为石英砂的2.7倍以下,无烟煤和砂组成的滤层厚度为600~100mm,砂层厚度为无烟煤厚度的60%以下。油田一般使用石英砂滤料,有效粒径为0.5~0.6mm,各种粒径所占的百分比为d=0.25~0.5mm占10%~15%;d=0.5~0.8mm占70%~75%,d=0.8~1.2mm占15%,~20%石英砂滤料的厚度为0.7~0.8m。......
2025-09-29

尽量选择已有的模具进行变形工艺的编制。热测尺寸的控制还与成品的内径与壁厚有关。应根据不同的规格,确定不同的热测尺寸。冷拔管的材质对钢管最终冷却尺寸也有影响。......
2025-09-29
相关推荐