当栅-源电压UGS下降到某一数值UP时,N型导电沟道完全消失,场效应晶体管失去导电能力。当栅-源电压和漏-源电压之差等于某一数值时,场效应晶体管将处于截止状态,此时的栅-源电压称为夹断电压。场效应晶体管的输出特性曲线可以分成四个区域,它们分别对应四种工作状态,即可变电阻区、恒流区、击穿区和截止区。......
2025-09-29
1.特征和原理 当异步电动机的转子转速nM超过同步转速n0时,电动机便处于再生制动状态。其基本特征是:
(1)n0与nM同方向;
(2)n0<nM。
当nM>n0时,转子绕组切割旋转磁场的磁力线的方向和电动机状态(nM<n0)时正好相反。所以,转子绕组中的感应电动势和电流的方向也都相反,所产生的电磁转矩的方向也就和旋转方向相反,如图1-31所示。
由于定子电流的相位要随转子电流而变,所以这时的异步电动机实际上处于发电状态,或者说,电力拖动系统的动能被“再生”成电能了。
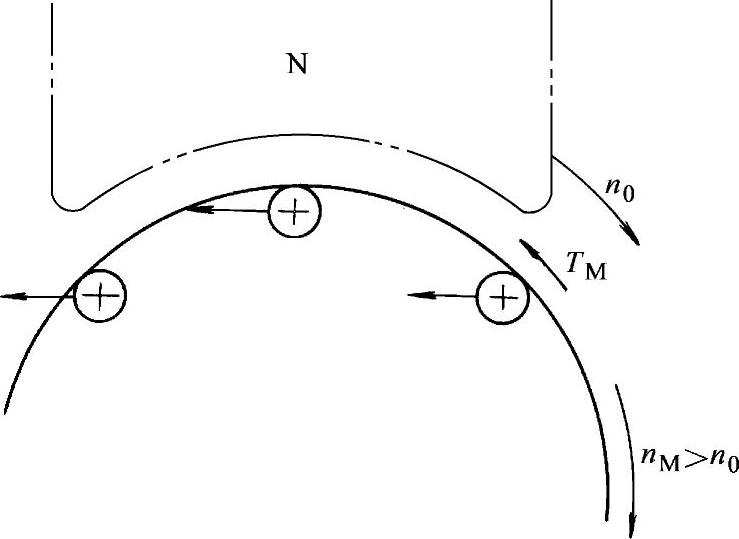
图1-31 再生制动原理
2.应用场合
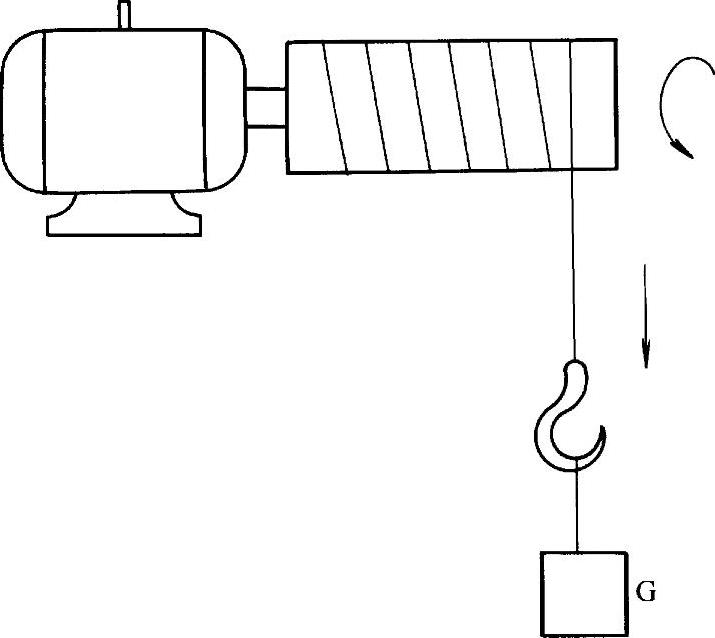
(1)起重机下放重物G时,由于重力加速度的原因,电动机轴上的转速可能超过同步转速而处于再生状态,如图1-32所示。这时,制动转矩的功能是阻止重物无限制地加速。当制动转矩与重力形成的转矩相等时,重物G将匀速下降。
 (https://www.chuimin.cn)
(https://www.chuimin.cn)
图1-32 起重机下放重物
(2)变频调速系统的降速是通过降低频率来实现的。在频率刚降低的瞬间,同步转速也同时下降,而电力拖动系统的转速则由于惯性而尚未下降,于是出现了nM>n0的状态。
3.机械特性 再生状态的机械特性是电动机状态机械特性向第二象限的延伸,如图1-33所示。
当起重机放下重物时,因为转子转速超过了同步转速,故工作点顺着原机械特性曲线①向第二象限移动,直至电磁制动转矩-TM与重物的牵引转矩TG相等,这时的工作点已移至G点(-TM=TG,nG)。
当变频调速系统降速时,由于频率降低,机械特性变成了曲线②。但由于电力拖动系统的惯性,系统的转速不可能突变,因而工作点将从曲线①上的Q点(TQ、nQ)按转速未变的原则“跳转”到曲线②上。由于曲线②上与转速nQ对应的点是第二象限的B点,于是得到反方向的制动转矩TB,使电力拖动系统迅速降速。
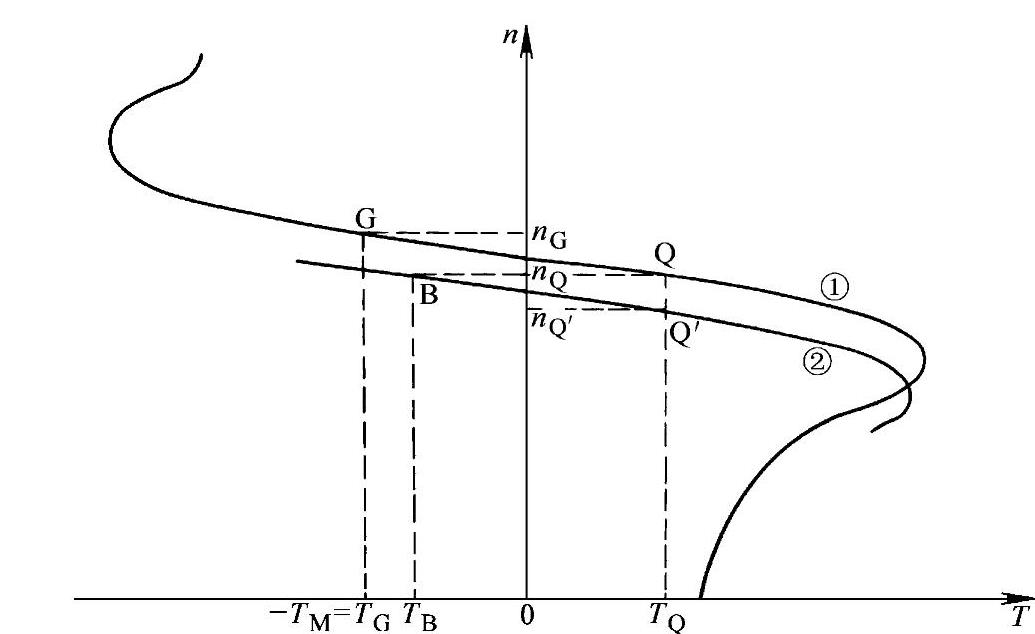
图1-33 再生制动的机械特性
①—原机械特性 ②—频率下降后的机械特性
相关文章

当栅-源电压UGS下降到某一数值UP时,N型导电沟道完全消失,场效应晶体管失去导电能力。当栅-源电压和漏-源电压之差等于某一数值时,场效应晶体管将处于截止状态,此时的栅-源电压称为夹断电压。场效应晶体管的输出特性曲线可以分成四个区域,它们分别对应四种工作状态,即可变电阻区、恒流区、击穿区和截止区。......
2025-09-29

图8-7 无内圈滚针轴承RNA型注:滚针轴承可带保持架或不带保持架,可具有一列或两列滚针,外圈上可有或无润滑槽和润滑孔48、49和69尺寸系列轴承的公差见表8-42至表8-44。2) 反向特性表8-43 滚针轴承公差——外圈 (μm)图8-9二极管的伏安特性曲线在U<0的部分,当二极管外加反向电压时,反向电流用IS表示。......
2025-09-29

白光LED的出现使LED的应用领域跨足至高效率照明光源市场。这些都是白光LED今后发展仍需努力的方向。近期,白光LED已达到单只功率超过1W,光输出为25lm,增强了它的实用性。目前白光LED在景观照明、庭园灯、汽车内部照明、中小尺寸的LCD背光源等方面已大量应用。对于照明用白光LED光源,更关心的是照明的视觉效果,辐射通量与器件的电功率之比表示白光LED的辐射效率。......
2025-09-29

用于过载保护的溢流阀一般称为安全阀。图4-11 先导式溢流阀的工作原理a)封闭 b)开启 c)溢流2)远程控制口K。但是,远程调压阀所能调节的最高压力不得超过溢流阀本身先导阀的调整压力。图4-12 溢流阀的静态特性曲线1)溢流阀的压力-流量特性。将溢流阀的遥控口与油箱连通后,液压泵处于卸荷状态时,溢流阀进出油口压力之差称为卸荷压力。......
2025-09-29
从自身参数可以看出,激光跟踪仪的测距精度远高于测角精度,而且随着测量距离的增大,测角误差增大更为明显,符合表1中的观测结果。如图2所示,在Matlab中利用激光跟踪仪自身参数把随机误差注入到观测值中,以模拟点云的形式得到三维坐标的点云分布图。查定额《配合比参考表》,砾石GD40中砂425水泥C15商品混凝土参考价为135.66元/m3,则:图2 激光跟踪仪测量点云分布图......
2025-09-29

图3-1炮口装填迫击炮弹2.优缺点迫击炮武器系统具有以下优点: 结构简单, 质量轻, 机动性好。由于迫击炮弹从炮口装填, 迫击发火, 射击时无须开关炮闩, 因而发射速度较快。迫击炮的射速每分钟可达几十发。由于迫击炮武器系统的上述优点, 在现代高技术战争中, 迫击炮武器系统仍然是不可替代的。......
2025-09-29
材料的特性8407钢是瑞典一胜百热作模具钢,属于铬、钼、钒合金工具钢和电渣重熔钢。参考对应牌号中国GB标准牌号4Cr5MoV1Si、美国AISI标准牌号H13 MODIFIED、日本JIS标准牌号SKD61、日本日立标准牌号DAC、日本不二越标准牌号HDS61、德国DIN标准材料编号1.2344、奥地利百禄标准牌号W302、瑞典UDDEHOLM标准牌号ORVAR专利钢材、瑞典一胜百标准牌号8402/8407。普通淬火、回火规范淬火温度℃,油冷,回火温度585℃/610℃/640℃,回火两次,每次2h,处理后硬度49HRC/47HRC/45HRC。......
2025-09-29

相关推荐