双馈发电机转子侧变流器按磁链定向的矢量控制系统如图8.11所示。图8.11 双馈发电机转子侧变流器按定子磁链定向的矢量控制系统系统检测发电机定子侧三相电压和电流,经3s/2s静止变换得到αβ坐标系上的电压usα、usβ和电流isα、isβ,然后由定子磁链观测器计算定子磁链Ψs幅值和位置角θs[见式、式]。......
2025-09-29
双馈发电机的动态d-q模型是一个非线性、多扰动、多变量、高阶次的时变系统,对其进行精确控制较为困难,而模糊控制具有非线性和自适应控制规律,对参数变化的线性或非线性对象有很强的鲁棒性。它的控制规则只用逻辑语言变量的形式定性表示,即可建立被控对象的模糊模型,特别适用于不易获得精确数学模型的被控对象。
模糊集合理论在2025年由美国教授Zandeh提出,由此开创了模糊数学及其应用的新纪元。模糊控制是模糊集合理论应用的一个重要方面。2025年英国教授Mamdani首先将模糊集合理论应用于锅炉和蒸汽机的动态过程控制,这些研究具有重要意义,激发了模糊控制领域的研究热潮。近年来模糊控制已被应用于电力电子系统,包括电机的速度控制、变流器的反馈控制、在线和离线诊断、参数估计等,本书尝试将模糊控制应用于双馈发电机的控制,只对转速环节设计二维模糊控制器,并进行必要的仿真分析。
图4-7为一般情况下矢量控制系统中的模糊速度控制器模块。该控制器根据速度误差信号更新输出DU,以使实际速度ωr跟踪上给定速度ωr。模糊控制器有两个输入信号,即偏差E和偏差变化量CE(与偏差的导数有关)。在矢量控制系统中,控制器输出量DU是转矩电流增量Δiqr,它的和或积分产生实际的控制信号U或转矩电流给定量iqr。结合风力发电系统中转速环节控制原理,可以建立如图4-8所示的基于转速模糊逻辑控制的双馈发电机发电运行控制框图。
可将该模糊控制器看成一个输入/输出的静态非线性映射,因此可用如下形式描述其控制作用:
K1E+K2CE=DU (4-22)
式中,K1和K2为非线性系数或增益因数,考虑到图4-7中的求和或积分过程,可以得到

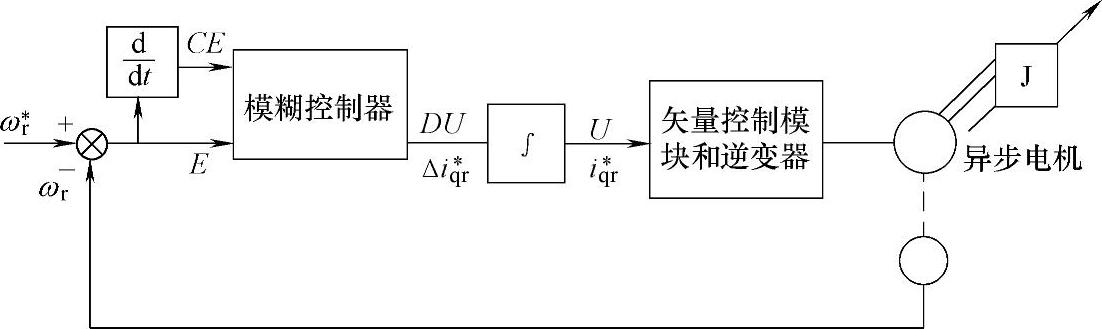
图4-7 矢量控制系统中的模糊控制器模块
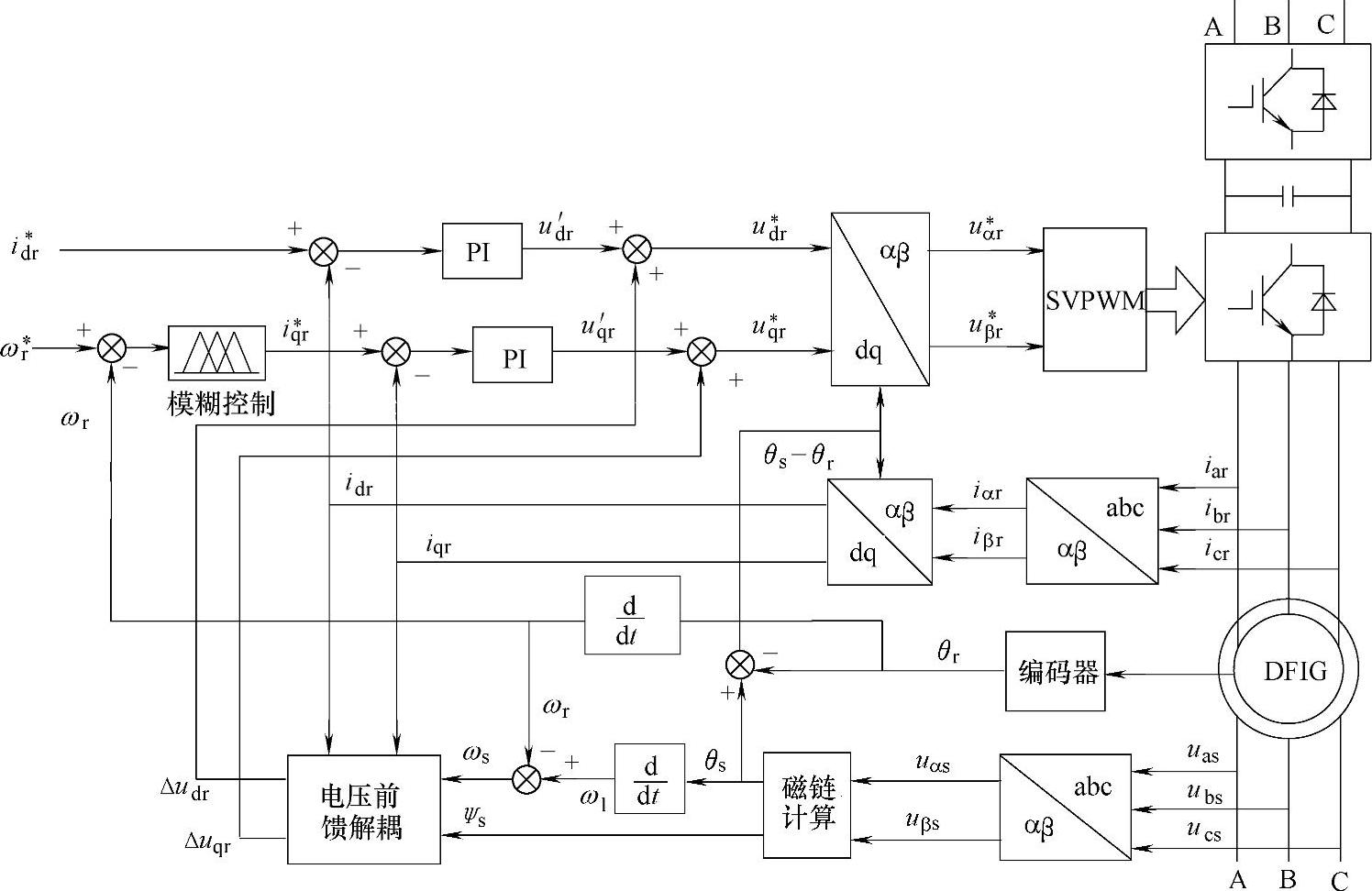
图4-8 基于转速模糊控制的双馈发电机发电运行控制框图
或者
可见这是一种含有非线性增益因数的模糊PI控制器。模糊控制器在线变化的非线性自适应增益使得它的控制系统响应对参数变化和负载干扰具有鲁棒性。(https://www.chuimin.cn)
典型反馈系统中的模糊控制结构如图4-9所示。闭环偏差和偏差变化量通过除以各自的量化因子,被转化为对应的单位信号e和ce。输出控制信号由量化因子GU和单位输出相乘得到,然后对其求和得到实际的控制信号U。模糊控制中采用单位变量的好处在于同样的控制算法能被应用到同类性质的所有被控对象中,这使得模糊控制器的设计更为方便。量化因子可以是常数也可以是可编程的,可编程的量化因子可用来调节不同控制区域的灵敏度,或使同样的控制策略可应用到相似的反馈闭环系统中。
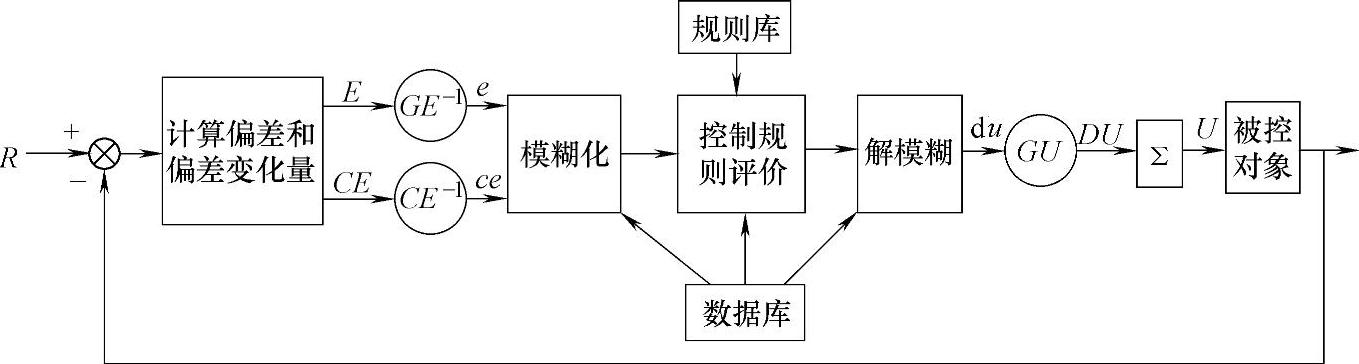
图4-9 典型反馈系统中的模糊控制结构
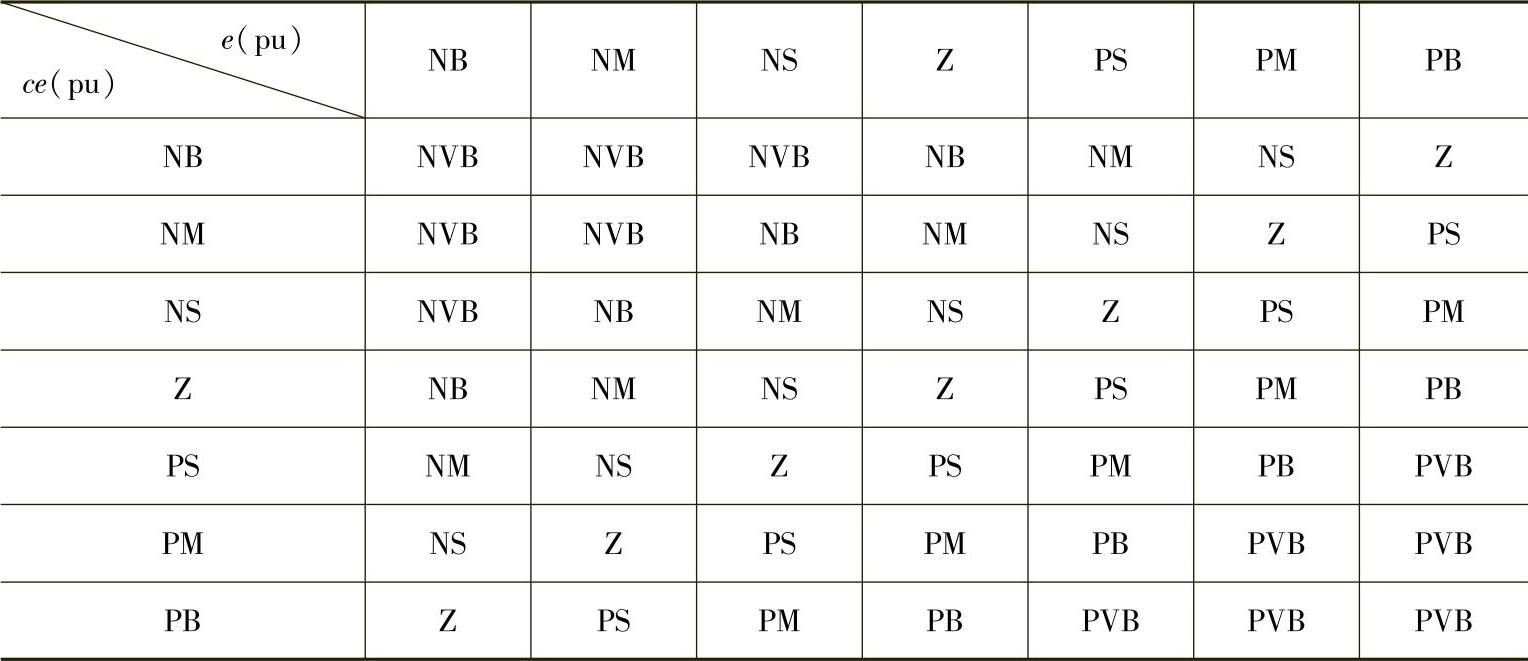
对于图4-9所示的模糊转速控制系统,其输入信号为E和CE,输出信号为DU,各信号的模糊集及其对应的三角形隶属函数分布如图4-10所示。定义模糊集合如下:Z=零,PS=正小,PM=正中,PB=正大,NS=负小,NM=负中,NB=负大,PVS=正非常小,NVS=负非常小。涵盖整个区间的各变量论域用单位值表示。信号e(pu)和ce(pu)有7个MF(隶属度函数),因为在原点处(稳态点)附近要求信号更加精确,输出设定有9个MF,所有MF在变量的正负半轴是对称的。模糊控制规则库由一系列“IF-AND-THEN”型模糊逻辑条件语句构成。表5-1给出了转速模糊控制器中对应的规则表。规则矩阵的第一行和左数第一列表示输入变量E和CE的模糊集合,矩阵主体元素表示输出变量DU的MF。规则库共包含7×7=49条规则。
在模糊控制器的设计中,一般有如下规则:①如果e(pu)和ce(pu)都为零,那么保持目前的控制量,令du(pu)=0;②如果e(pu)非零,但却以理想的速度接近零,那么保持目前的控制量;③如果e(pu)增长,那么根据信号e(pu)和ce(pu)的大小改变控制信号du(pu)使e(pu)趋于零。
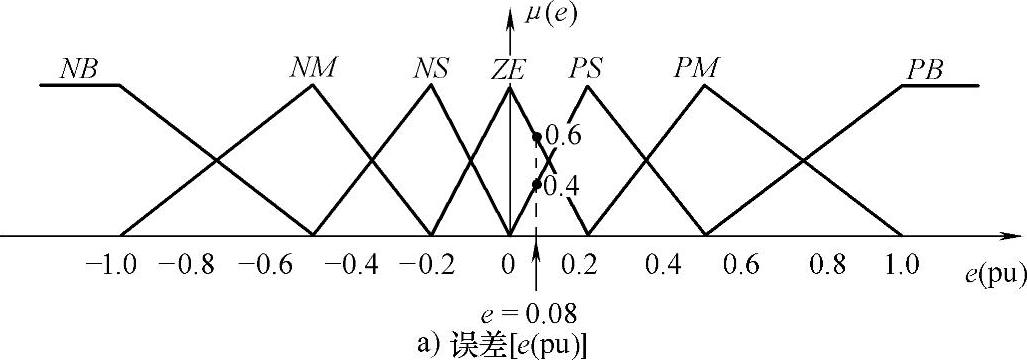
图4-10 转速模糊控制的隶属函数
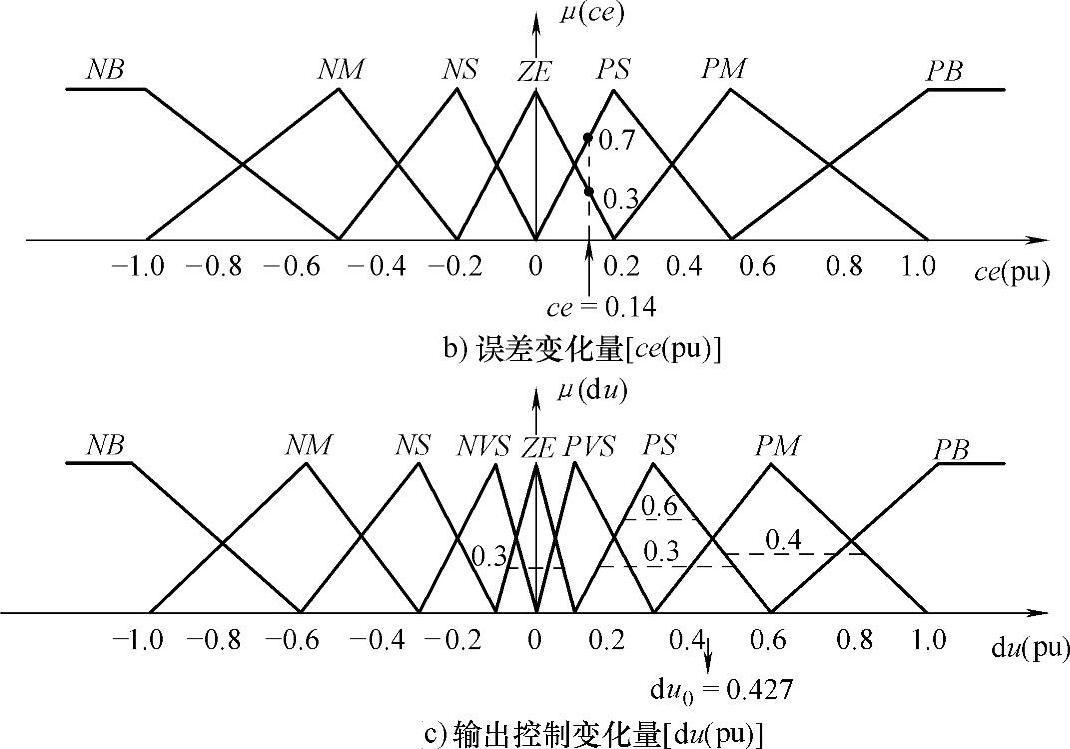
图4-10 转速模糊控制的隶属函数(续)
用于转速模糊控制的规则矩阵见表4-1。
表4-1 用于转速模糊控制的规则矩阵
相关文章

双馈发电机转子侧变流器按磁链定向的矢量控制系统如图8.11所示。图8.11 双馈发电机转子侧变流器按定子磁链定向的矢量控制系统系统检测发电机定子侧三相电压和电流,经3s/2s静止变换得到αβ坐标系上的电压usα、usβ和电流isα、isβ,然后由定子磁链观测器计算定子磁链Ψs幅值和位置角θs[见式、式]。......
2025-09-29

图3-56 转子绕组串接频敏变阻器起动控制线路线路工作原理分析如下:1)闭合电源开关QS。随着转子转速提高,转子绕组与定子旋转磁场相对转差逐渐减小,转子绕组切割磁场的相对速度逐渐变慢,转子绕组产生的感应电流频率逐渐降低,频敏变阻器对感应电流阻抗逐渐减小,转子绕组回路的电流逐渐增大,转子转速又继续提高。......
2025-09-29

图A-3-1双向Buck-Boost变换器方案2:如图A-3-2所示,原边为推挽电路,次边为混合桥式电路,是电流源双向DC-DC变换器拓扑的一种。采用两路PWM驱动,一路开关工作时,另一路截止。综合比较后,本设计选用方案3。图A-3-4为Buck模式等效电路,图A-3-5为Boost模式等效电路。图A-3-7双向电能控制流程图二、核心电路设计总系统设计框图如图A-3-6和图A-3-7所示。上管驱动电路如图A-3-8所示。图A-3-8上管驱动电路电流采样电路设计精确的电流控制离不开精确的电流测量和采样电路。......
2025-09-29

转子是整个小型转子发动机中运动状况最为复杂的零件。图2.13所示为转子质心的角加速度变化曲线。在转子发动机中,偏心盘中心的轨迹是以偏心距e为半径的正圆。图2.18转子上点P的角加速度随仿真时间变化曲线正如前面所叙述,转子顶点运动轨迹是双弧圆外旋轮线。图2.19转子上P点的运动轨迹图2.19转子上P点的运动轨迹图2.20转子上另取三点的位置图2.20转子上另取三点的位置图2.21转子上P1,P2,P......
2025-09-29

将有关无线控制的功能尽量地集中到BSC上来,以简化基站的设备,这是GSM的一个特色。爱立信的基站采用内部软件测试及环路测试在话音通道上对TRX进行监视。在呼叫期间,BSC对连接进行监视,移动台及收发信机测量信号强度及话音质量,测量结果传回BSC。BSC配置、分配并监视它与RBS之间的64KBPS电路,它也直接控制RBS内的交换功能。......
2025-09-29

上节用只有一个刚结点的结构介绍了力矩分配法的基本概念。对于具有两个以上刚结点的结构也可用力矩分配法进行计算。多结点力矩分配法的计算步骤如下:求出汇交于各结点每一杆端的力矩分配系数μij,并确定其传递系数Cij。固定刚结点B和C,各杆的固端弯矩为其余各固端弯矩均为零。刚结点B的约束力矩除固端弯矩外,还包括传递过来的传递弯矩,即所以传递弯矩为进行第二轮计算。用力矩分配法作图16-8所示刚架的弯矩图。......
2025-09-29

从前面几节的讨论中可以看到,电力系统受扰动后发电机之间相对运动的特性,表征电力系统稳定的性质。为了较准确和较严格地分析电力系统的稳定性,必须首先建立描述发电机转子运动的动态方程—发电机转子运动方程。这一节,将导出适合电力系统稳定计算用的发电机转子运动方程。发电机转子运动方程,是电力系统稳定分析计算中最基本的方程。......
2025-09-29

由模型[见式]第1、2行可得usα=isα+Lmpirαusβ=isβ+Lmpirβ将式的irα、irβ代入上式,并令σ=1-L2m/LsLr,整理可得所以由式组成的转子磁链计算流程如图4.10所示。与电流模型法相比,电压模型法只涉及定子电阻,定子电阻易于测量并且受温度影响较小,但是在低速时,定子电阻压降的影响增大,定子电阻压降对磁链计算的影响增加,因此电压模型较适合于高速范围的观测。......
2025-09-29
相关推荐