因而有文献指出,可进行人工干预,根据不同的季节来改变CVT控制的基准,从而实现MPPT控制。所以说,CVT控制无法实现真正意义上的MPPT控制,具有较大的弊端和局限性。下面结合图5-20和图5-21来描述扰动观测法的MPPT过程。......
2023-06-23
在Simulink中搭建的MPPT光伏发电仿真系统如图7-4所示。solar panel模块为光伏电池模型,用它和一个可控电流源可模拟真正的光伏电池板,两个输入为光照强度和光伏电池板电压,两个输出为光伏电池板输出电流和输出功率。CM为电流传感器,检测光伏电池板输出电流。V1为电压传感器,用于检测光伏电池板输出电压。S-Function是利用C语言编写的MPPT控制算法,然后来控制PWM波的占空比。V2是电压传感器,主要用来检测输出电压,其他的电阻、电容、电感、二极管的参数可参照实际元件设定,以便使仿真结果更加接近真实情况。
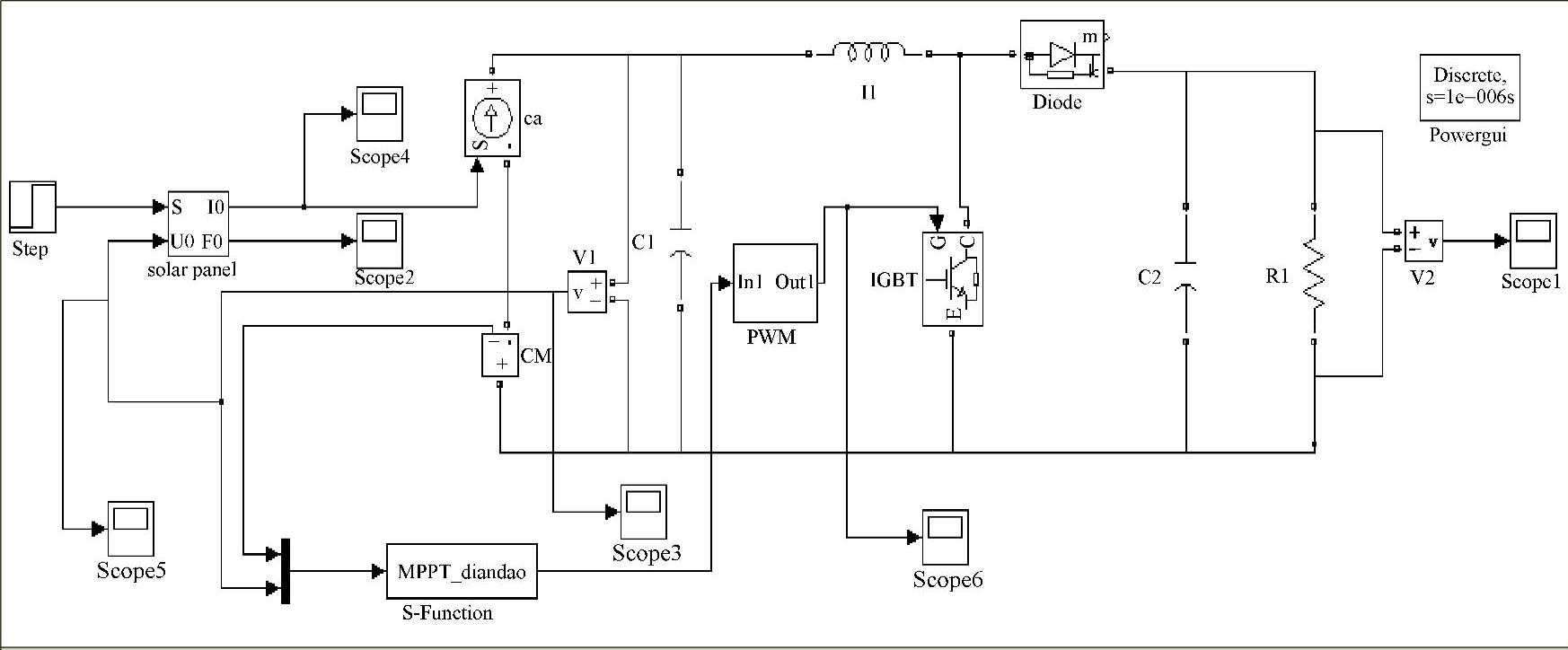
图7-4 基于MPPT的光伏发电系统的Simulink仿真模型
图7-4中的PWM发生模块的输出占空比可以根据输入信号不同而改变,其内部结构如图7-5所示。其利用比较器将一个固定频率的三角载波与S-function的输出进行交截,可得到一个固定开关频率的PWM驱动信号,占空比能随着S-function的变化而改变。
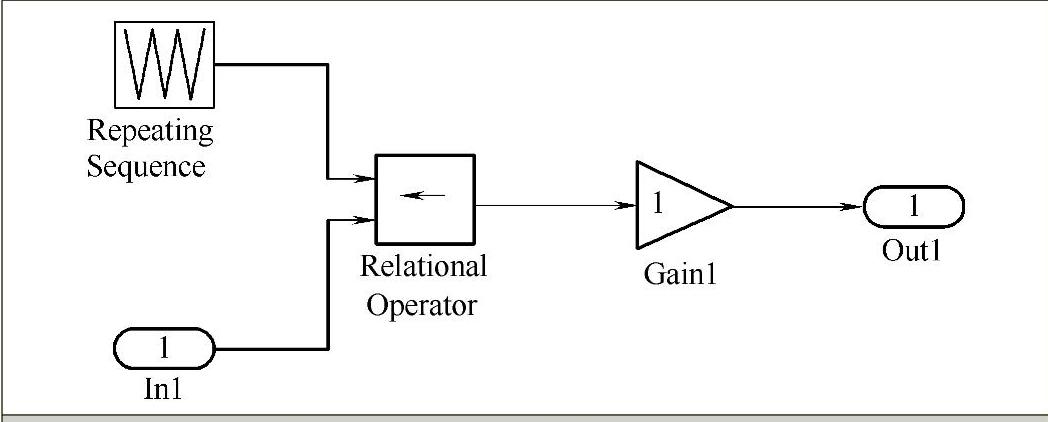
图7-5 PWM模块内部结构
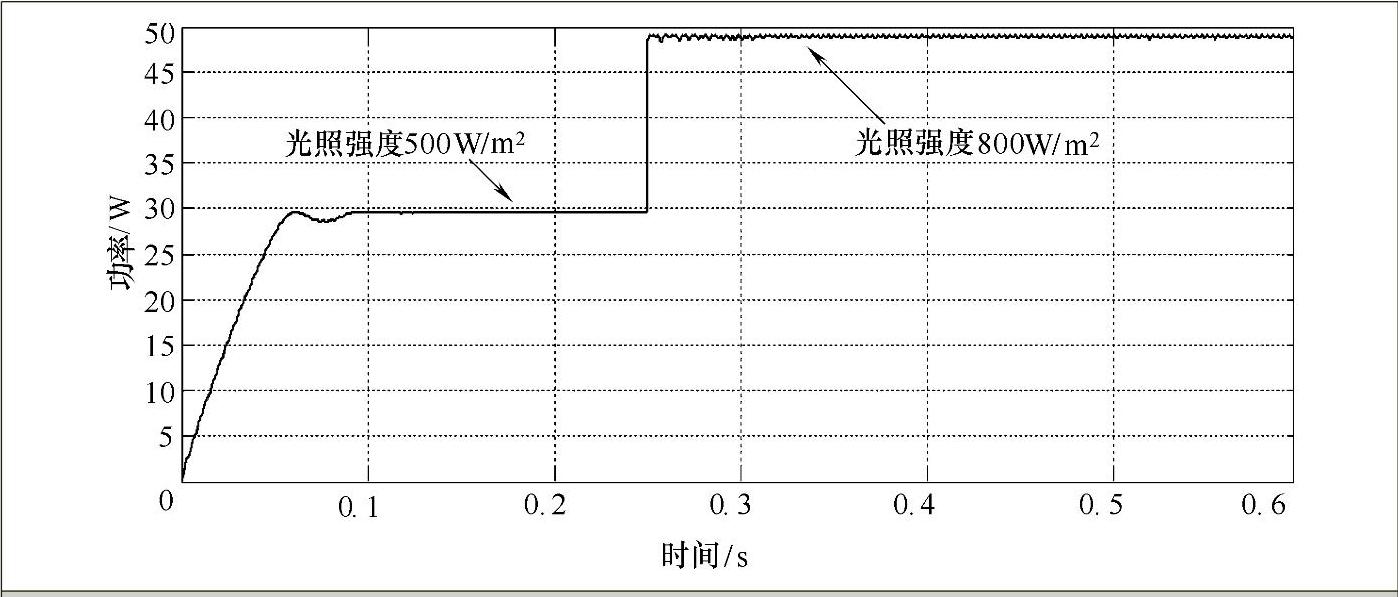
图7-6 扰动观测法MPPT功率跟踪效果图
1.MPPT算法的MATLAB仿真和结果分析
(1)扰动观测法仿真
图7-6所示是采用扰动观测法的控制策略,光照强度从S=500W/m2增加到S=800W/m2,温度T=298K条件下,光伏电池板的输出功率变化曲线图。
从图7-6中可以看出,扰动观测法可以较好地实现光伏电池板的最大功率跟踪,动态跟踪性能较好,跟踪到后的功率波动也比较小。
(2)定步长电导增量法仿真
图7-7所示是定步长电导增量法控制策略下,光照强度从S=500W/m2增加到S=800W/m2,温度T=298K条件下,光伏电池板的输出功率曲线图。

图7-7 定步长电导增量法MPPT功率跟踪效果图
从图7-7中可以看出,定步长增量电导法可以实现光伏电池板的最大功率跟踪,动态跟踪性能比较好,跟踪到后的功率波动也很小。
(3)变步长增量电导法仿真
图7-8所示为变步长增量电导法控制策略下,光照强度从S=500W/m2增加到S=800W/m2,温度T=298K条件下,光伏电池板的输出功率曲线图。
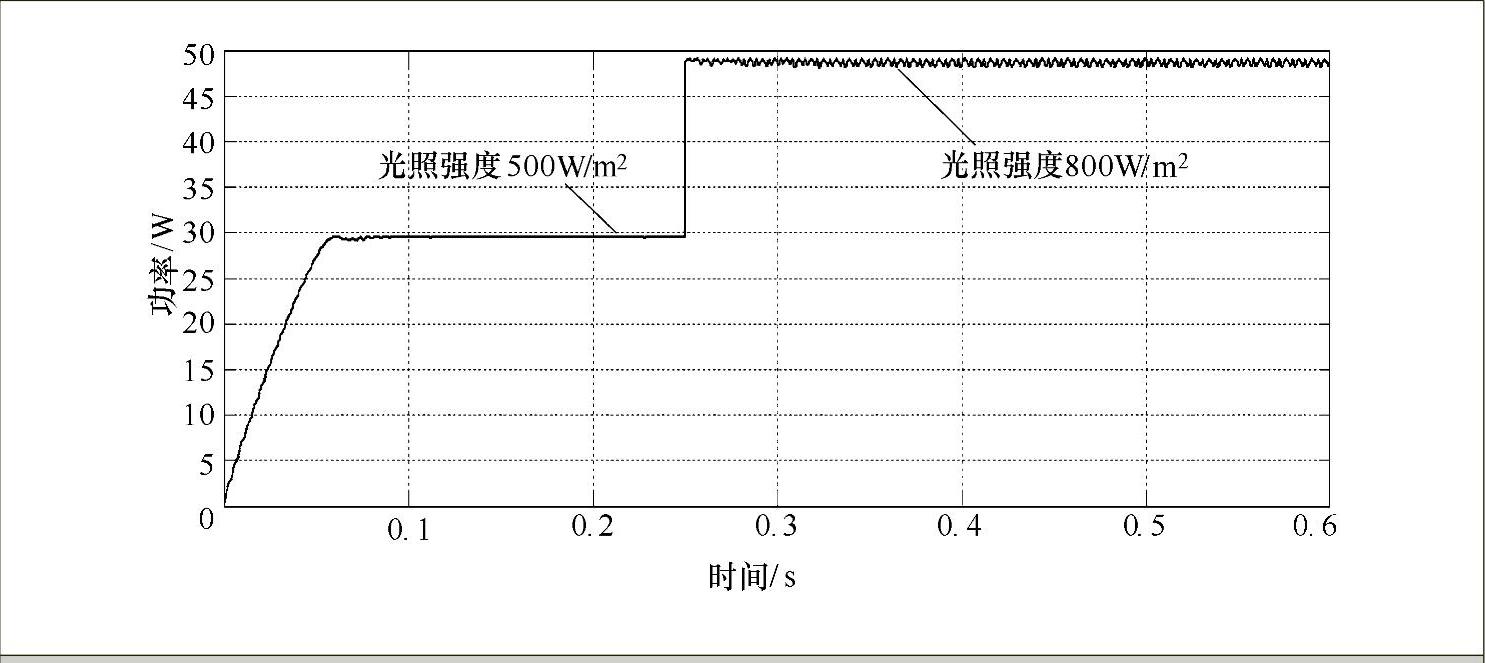
图7-8 变步长电导增量法MPPT功率跟踪效果图
由图7-8可知,变步长电导增量法同样可以较好地实现光伏电池板的最大功率跟踪,动态跟踪性能很好且超调要小于定步长电导增量法,跟踪到后的光伏电池输出功率波动较小。
(4)变步长、定步长电导增量法分析
图7-9所示为定步长电导增量法与变步长电导增量法下光伏电池的最大功率跟踪效果对比图。其中,光照强度从S=500W/m2增加到S=800W/m2,温度T=298K。
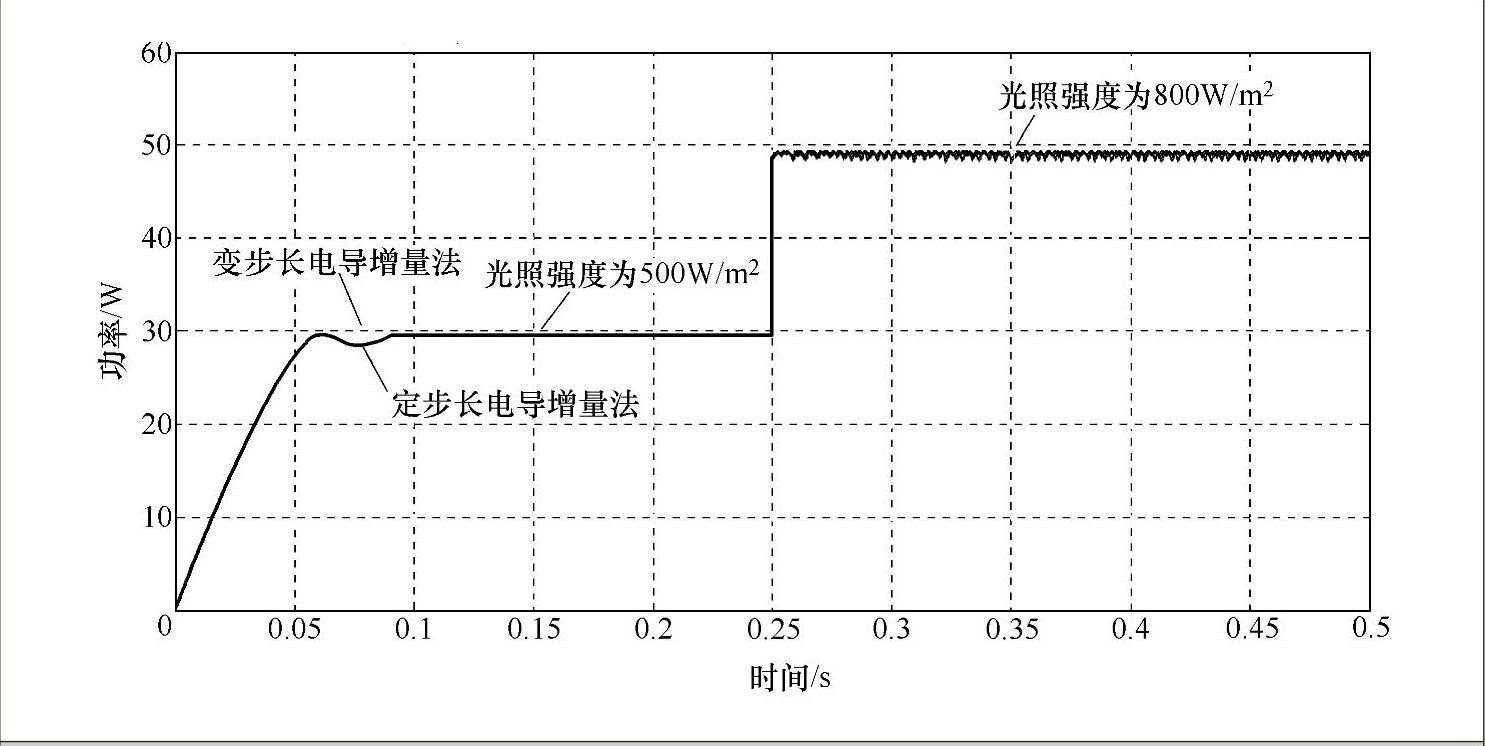
图7-9 定/变步长电导增量法MPPT功率跟踪效果对比图
通过对不同MPPT算法的仿真,可以看到几种算法在进行最大功率追踪时的效果差异。经过对变步长电导增量法和定步长电导增量法MPPT算法的MATLAB仿真波形进行分析比较,可得到如下结论:
1)电导增量法可以实现光伏阵列的MPPT,无论是变步长还是定步长电导增量法,在最大功率点处,振荡都几乎为零,说明该方法与扰动观测法相比,更具优越性。
2)改进的变步长电导增量法效果明显,在保持定步长电导增量法较高稳态精度的同时,极大地提高了系统的响应速度。
2.模糊算法仿真模型和结果分析
图7-10所示为基于模糊算法的光伏系统MPPT仿真模型,其主要结构和上述MPPT光伏发电仿真系统图的结构相类似。这里的MPPT_mohu系统函数主要用于计算E=dP/dU和
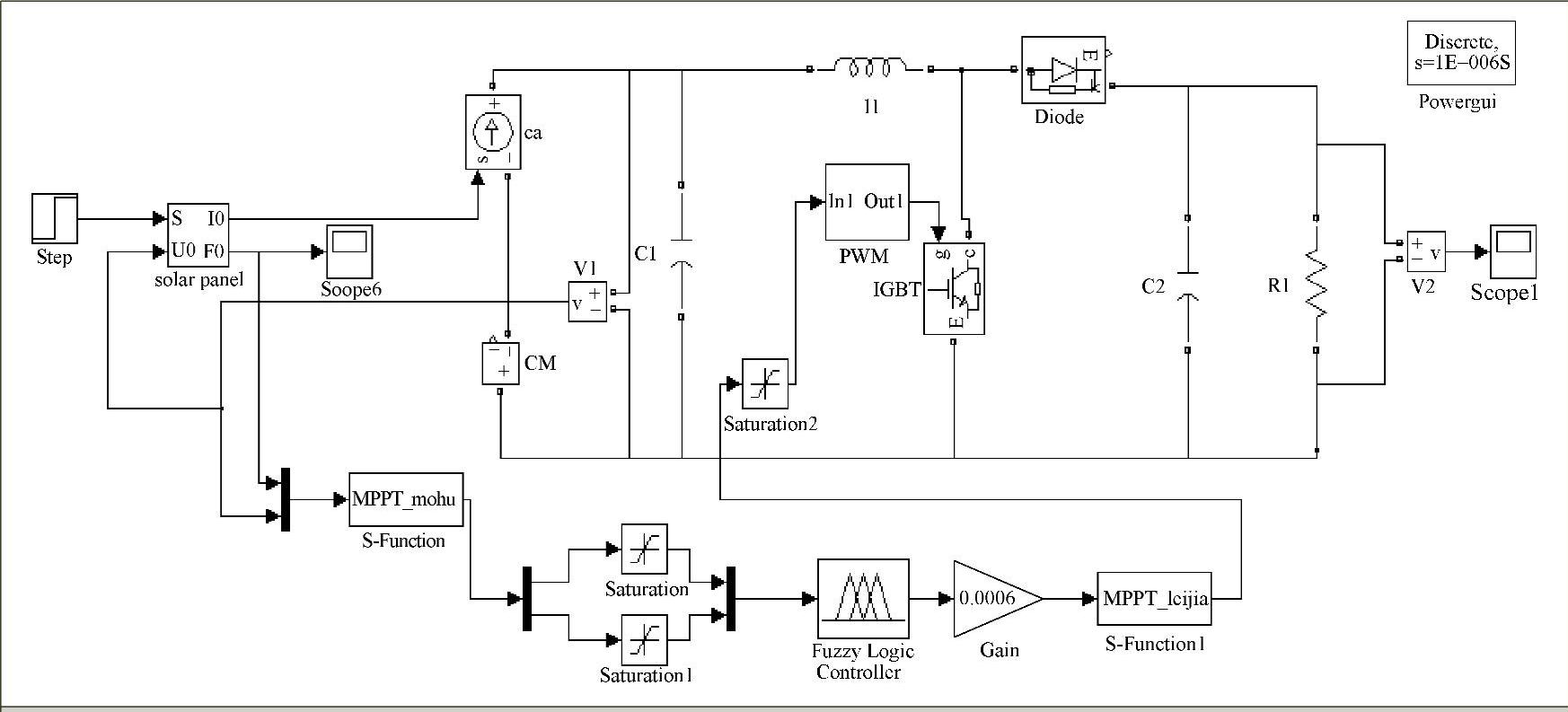
图7-10 基于模糊算法的MPPTSimulink仿真模型
dE。E和dE为模糊控制的两个输入,Saturation为限幅模块,将输出限制在所设定的范围内。Fuzzy Logic Controller为模糊控制模块,里面有设置好的隶属度函数、模糊规则等。MPPT_leijia为一个累加函数,主要用于把模糊控制输出的PWM波调节量累加起来并输出给PWM模块。
图7-11所示为采用模糊控制算法后,在光照强度由S=500W/m2到S=800W/m2,温度为T=298K条件下,光伏电池板的输出功率跟踪效果图。
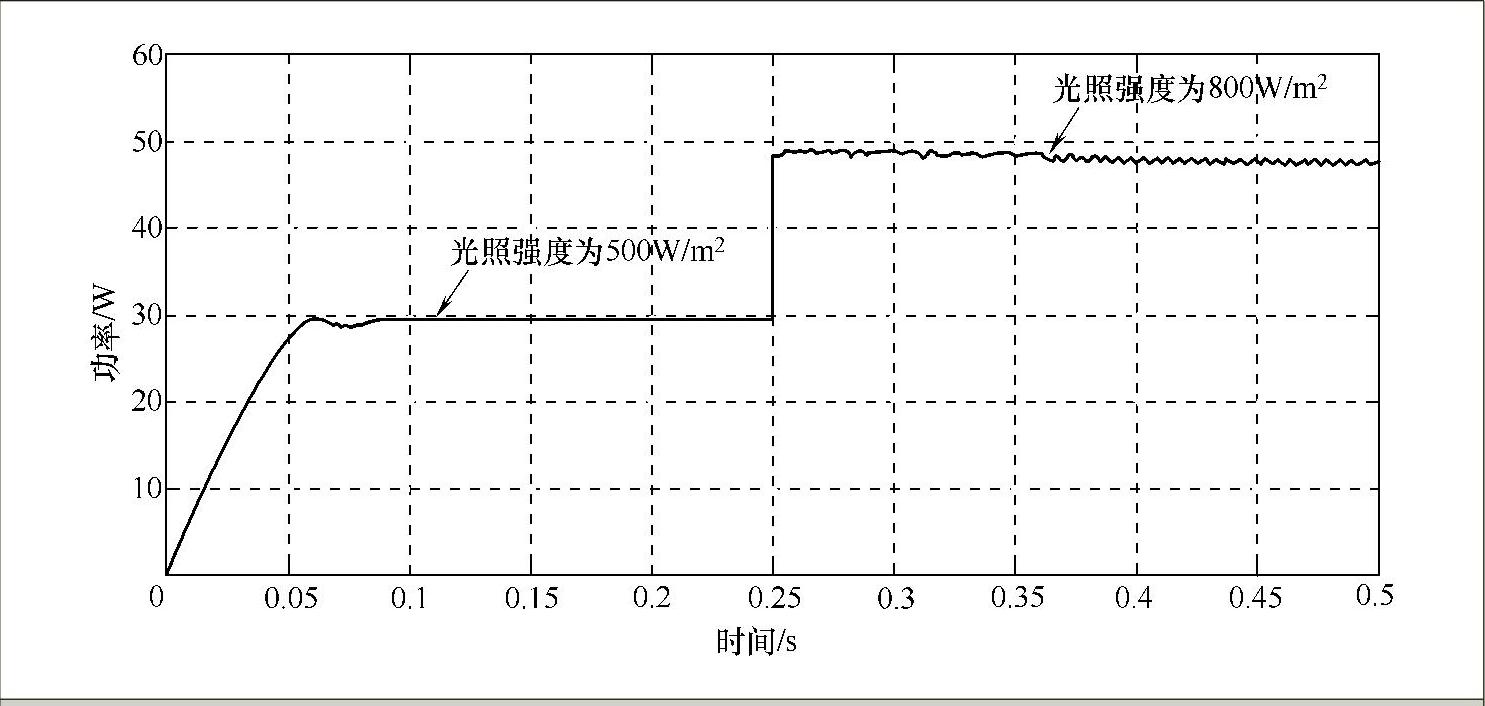
图7-11 模糊控制算法MPPT功率跟踪效果图
由图7-11可知,模糊控制算法可以实现光伏电池板的最大功率跟踪,动态跟踪性能较好,跟踪到后的功率波动较前几种MPPT控制策略要稍大些。
3.控制算法比较分析
1)模糊控制算法的实现有两种途径:硬件电路实现和软件编程。硬件模糊控制器成本高,软件编程则需要使用高性能的DSP才能达到运算要求。
2)第5章中提到的恒压法虽然易于实现,原理简单,但是其跟踪精度比较差,造成较多的功率损失,并不能实现真正意义上的MPPT,且其对环境干扰的适应性较差。
3)扰动观测法最大的缺点是在最大功率点附近会出现振荡,由于算法本身的不严谨,易造成系统的误判。
4)变步长电导增量法控制效果明显优于定步长电导增量法,需要使用电压传感器电流传感器,并通过AD芯片就可以实现反馈信号的采集。电导增量法需要注意的是导纳计算时,可能会出现系统控制量的突变,需要对控制量进行适当限幅。
有关电力电子技术在电力系统中的应用的文章

因而有文献指出,可进行人工干预,根据不同的季节来改变CVT控制的基准,从而实现MPPT控制。所以说,CVT控制无法实现真正意义上的MPPT控制,具有较大的弊端和局限性。下面结合图5-20和图5-21来描述扰动观测法的MPPT过程。......
2023-06-23

图A-3-1双向Buck-Boost变换器方案2:如图A-3-2所示,原边为推挽电路,次边为混合桥式电路,是电流源双向DC-DC变换器拓扑的一种。采用两路PWM驱动,一路开关工作时,另一路截止。综合比较后,本设计选用方案3。图A-3-4为Buck模式等效电路,图A-3-5为Boost模式等效电路。图A-3-7双向电能控制流程图二、核心电路设计总系统设计框图如图A-3-6和图A-3-7所示。上管驱动电路如图A-3-8所示。图A-3-8上管驱动电路电流采样电路设计精确的电流控制离不开精确的电流测量和采样电路。......
2023-06-23

方案1:利用分立元件进行双向Buck-Boost拓扑,利用单片机对MOS驱动器进行相关控制,双向DC-DC变换器的功能结构如图A-6-2所示。综合考虑,最终系统采用了方案2,选用LM2596s作为辅助电源的转换芯片,效率达到92%,面积为1.5 cm×5 cm,质量为15 g左右,经过测试,满足系统所涉及的设计要求。AD电路方案1:采用普通八位的AD。方案2:采用16位的AD。......
2023-06-23

定义变量在CADFEKO中左侧的树形浏览器中,双击“Var ia bles”结点,依次定义如下变量。缝长(U方向):su=t+0.5。缝高(N方向):sn=2.5。缝与水平面夹角:alpha_1=20。图5-218 设置单位图5-219 定义变量模型建立在“Construct”菜单中单击“Cuboid”按钮,在弹出的“Create cuboid”对话框中建立矩形波导结构,设置如下。Label:waveguide_i,如图5-220所示。单击“OK”按钮,完成对slot_1的旋转。图5-227 缝隙slot_2创建图5-228 缝隙slot_2创建创建slot_3。选中slot_4,在“Details”中选择“Transforms”,按照图5-231和图5-232所示,先双击“Rota......
2023-10-31
第二部分是将每个IMF信号进行希尔伯特变换,从而得到信号的希尔伯特谱。Prony算法不仅可以对仿真结果进行分析,还能够对现场的实时测量数据进行分析,具有很高的工程实用性。......
2023-06-25

②串联RLC 参数设置:电阻为1 Ω,电感为0.5 H。另一个脉冲发生器1 的延迟时间设置为1 s。图3.23单相半桥电压型逆变电路的仿真模型图3.24脉冲发生器参数设置仿真电路图中,U0 为负载电压,I0 为负载电流,其仿真波形如图3.25 所示。图3.25单相半桥电压型逆变电路的仿真波形单相全桥电压型逆变电路的仿真在MATLAB 中搭建如图3.26 所示的仿真电路模型。......
2023-06-23
图1.43所示是晶闸管-直流电动机开环直流调速系统主电路模型,模型中主要模块提取路径见表1.11。现以例1.2的双闭环控制直流调速系统为例说明。......
2023-06-19

相关推荐