目前,国际上对微电网的定义各不相同,从1999年开始,美国电力可靠性技术解决方案协会首次对微电网在可靠性、经济性及其对环境的影响等方面进行了研究。微电网有两种运行模式:并网运行模式和孤岛运行模式。在现有的微电网结构中,储能装置是维持系统暂态稳定必不可少的设备。微电网具有单点接入、运行灵活等特点,因此能给大电网和电力用户分别带来一些益处。......
2023-06-23
目前,微电网常用的基本控制方法主要分为主从型和对等型两种。前者是将DG电源赋予不同的职能,并有一个主单元来协调控制其他DG电源;后者是基于外特性下降法的控制策略,各个DG电源之间采用了相同的控制方法,且它们之间是平等关系。除上述两种控制策略外,其他的各种控制策略都可归为这两类,或者是看作基于这两类控制策略的改进与融合。
1.主从控制法
主从控制法是对微电网内各个微电源采取不同的控制方法,并赋予不同的职能。通过将其中一个(或几个)微电源作为主电源来检测电网中的各种电气参量,而后根据电网的运行情况采取相应的调节手段,并通过通信线路来控制其他“从属”电源的输出来达到整个微电网的功率平衡,使电压频率稳定在额定值。
主从控制策略主要用于孤岛运行时的微电网控制。当并网运行时,微电网内的各个微电源只需控制各自功率流的输出以保证微电网内部的功率平衡。由于微电网的总体容量相对于配电网来说较小,因此,微电网的电压水平和额定频率都由配电网来支持和调节。而当微电网脱离配电网进行孤岛运行时,微电网内部如果要保持电压和频率的额定值,就需要某个或者几个电源担当原来配电网的角色来提供额定电压和频率。这个单元被称为主电源或参考电源。参考电源一般采用U-f控制方法,输出额定电压和频率值,而其他的处于从属地位的微电源则根据需要采取P-Q或者P-U控制法,控制输出的功率和电压来维持微电网内部的功率平衡。
主从控制法的一般过程如下:
1)当检测单元检测到孤岛,或微电网主动从配电网断开进入孤岛运行模式时,微电网控制切换到主从模式,通过调整各个微电源的输出功率来达到微电网内部功率平衡。
2)当微电网负载变化时,首先由主电源自动根据负载变化调节输出电流,增大或减少输出功率;同时检测并计算功率的变化量,根据现有发电单元的可用容量来调节某些从属电源的设定值,从而增大或减少它们的输出功率;当其他电源输出功率增大时,主电源的输出就相应地自动减少,从而保证主电源始终有足够的容量来调节瞬时功率变化。
3)当电网中无可调用的有功或无功容量时,只能依靠主单元来调节。当负载增加时,根据负载的电压依赖特性,可以考虑适当减少电压值;如果仍然不能实现功率平衡,则可以采用切负载的措施来维持微电网运行。
当然,主从控制策略也存在一些缺点。首先,主电源采用U-f控制法,其输出的电压是恒定的,要增加输出功率,就只能增大输出电流;而且,负载的瞬时波动通常首先是由主电源来进行平衡的,因而要求主电源有一定的容量。其次,由于整个系统是通过主电源来协调控制其他电源,因而一旦主电源出现故障,整个微电网就会出现瘫痪。另外,主从控制法依赖于控制信号的传输,需要高可靠性的通信技术,因此通信的可靠性直接会影响系统的可靠性,而且增加通信设备会使系统的成本和复杂性增大。
2.对等控制法
所谓对等控制,就是指各微电源之间在关系上是“平等”的,不存在从属关系。所有的微电源以预先设定的控制模式参与有功和无功的调节,维持系统内的电压和频率稳定。对等控制策略主要基于外特性下降法,即分别将频率和有功功率、电压和无功功率关联起来,通过一定的控制算法,模拟传统电网中的有功—频率特性曲线和无功—电压曲线,实现电压、频率的自动调节而无须借助于额外的通信设备。
有功和频率的关系曲线如图6-15所示。其中,由线A和B分别为微电源a和b的有功-频率曲线。正常运行时,微电源a和b均运行于额定角频率ω0,输出功率分别为Pa0和Pb0。当负载功率增加时,即微电源a和b的输出功率分别增加到Pa1和Pb1时,同时系统角频率从ω0降到ω1,系统在新的频率值下继续运行。同样,当负载功率减少时,a和b的输出功率会以同样的比例减少,同时系统频率也会升高到额定频率,甚至高于额定频率,上述系统频率随输出功率调整的过程是可逆的。因此,当微电源的负载发生变化时,微电源的输出功率也随之改变,使得系统频率在额定角频率ω0附近上下波动。
根据图6-15中曲线可以写出功率—频率变化的动态方程为
ω=ω0-m(P-P0)=ω0-mΔP (6-11)
m=-(ω0-ωmin)/Pmax (6-12)
式中,m为曲线斜率;ω0和ωmin是系统运行的额定频率和最小频率;P0和Pmax分别为微电源在ω0和ωmin下的输出功率。
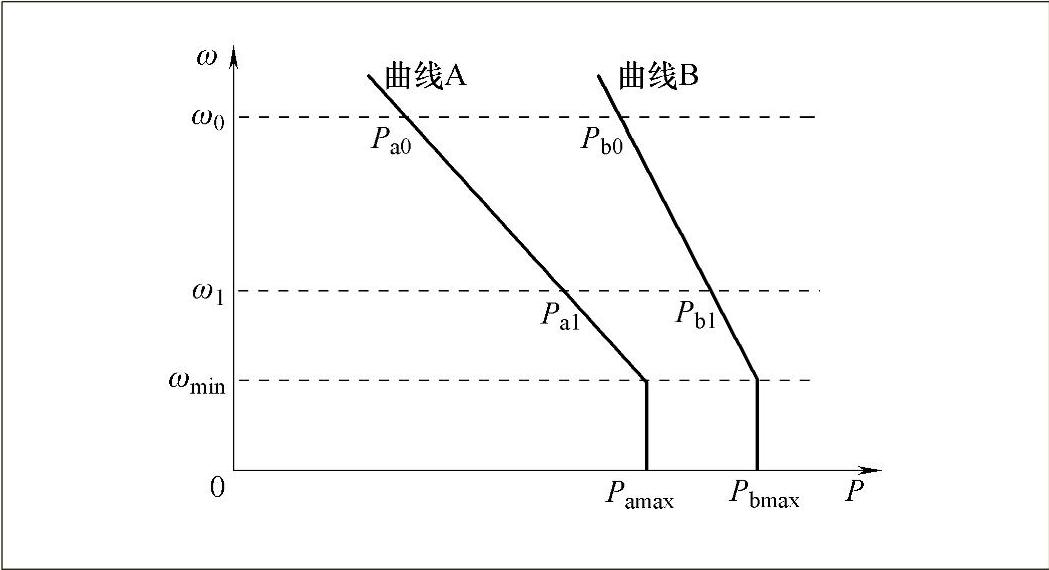
图6-15 有功-频率曲线
类似,电压和无功功率的关系曲线如图6-16所示。
同样,根据曲线可以写出方程
E0=Ereq-mQQ (6-13)
mQ=ΔE/Qmax (6-14)
式中,Ereq为额定参考电压值;Qmax是电源的无功输出容量;mQ为曲线斜率,恒为负。只有当注入无功功率为0时,E0等于Ereq。
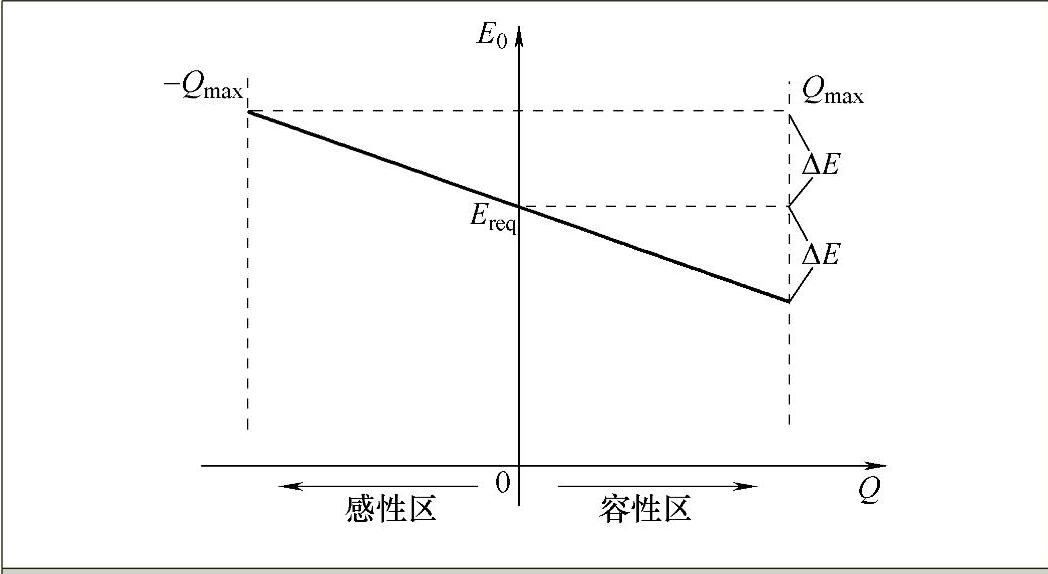
图6-16 无功-电压曲线
从上面的公式可以看出,采用对等控制策略时,微电源只需测量输出端的电气参量,独立地参与到电压和频率的调节过程中,不用知道其他电源的运行情况,整个过程也无需通信。而且,当某一个微电源发生故障退出运行时,其余的电源仍然能够不受影响地继续运行,系统的可靠性要比主从控制法高。另外,当需要增加新的发电单元时,只需要对新的电源设置同样的控制策略,直接接入系统即可,而无需对系统的其他地方进行改动,方便实现“即插即用”和系统扩容。
当然,对等控制策略也有许多缺点。例如,负载瞬时变化时,输出电压和频率同额定值之间总会存在较小的误差,稳态误差不能为零;不能正确地调节非线性负载及线路造成的谐波分布;不同于输电网(X>>R)中,频率主要受有功功率影响而电压主要受无功功率影响的情况,在配电网中,R>>X,线路电阻的影响不可忽视,其对无功功率的影响非常显著,在此情况下,系统外特性偏软;再者,在三相系统中,由于拓扑结构变化(如主动孤岛运行)引起的控制模式的改变,因而对等控制法也不一定是个很好的选择,尤其是在同时有线性和非线性负载的情况下。
总之,主从控制策略和对等控制策略各有优缺点,分别适用于不同的运行情况。如何把二者结合起来,发挥它们各自的优势,实现相互补充形成新的控制方法,或者通过适当的控制系统将二者实行分时复用,将是一件非常有意义的事情。
有关电力电子技术在电力系统中的应用的文章

目前,国际上对微电网的定义各不相同,从1999年开始,美国电力可靠性技术解决方案协会首次对微电网在可靠性、经济性及其对环境的影响等方面进行了研究。微电网有两种运行模式:并网运行模式和孤岛运行模式。在现有的微电网结构中,储能装置是维持系统暂态稳定必不可少的设备。微电网具有单点接入、运行灵活等特点,因此能给大电网和电力用户分别带来一些益处。......
2023-06-23

对于微电网的基本结构与相关控制的研究,发达国家和地区一直走在世界的前列,具有代表性的国家和地区主要有美国、欧洲和日本。下面将简单叙述上述国家和地区的微电网研究现状和提出的基本架构。......
2023-06-23

设计电器控制电路的常用方法有两种:即经验设计法和逻辑设计法。这种设计方法的特点是方法比较简单,但要求设计人员必须熟悉大量的控制电路,掌握多种典型控制电路的设计资料,同时具有丰富的设计经验。其特点是设计的控制电路比较合理,特别适合完成较复杂的生产工艺所要求的控制电路,但是逻辑设计方法难度较大,不易掌握。因此,功能表图的绘制是电器控制系统设计实现科学化、规范化和工程化的极为重要的环节。......
2023-06-15

由于是无功和电压问题的稳态分析,在研究中,把直流系统等值为无功可调的负荷节点。令CV=-LDD-1LDG,CQ=LDD-1,则有式中,ΔU为各无功电压控制设备的电压控制变化量;CVΔUG代表无功控制对节点电压的影响;CQΔQD代表无功扰动引起的节点电压变化。若假设节点电压在系统无功调整变化前处于待调整状态,电压控制的任务就是在系统正常运行或发生扰动时使观测节点的电压偏差尽可能小,以维持区域电压接近优化水平。......
2023-06-29

通常将焊接电流在30A以下的熔入型等离子弧焊称为微束等离子弧焊。微束等离子弧是等离子弧的一种。微束等离子弧焊电源使用时是采用正极性接法,一般采用氩气作为工作气体。微束等离子弧焊的焊接参数主要是焊接电流、焊接速度、工作气体流量、保护气体流量、电弧长度、喷嘴直径、喷嘴通道比和钨极的内缩量等,它们对焊缝的形状和焊接质量都有影响。......
2023-06-26

变频器是工业调速传动领域中应用较为广泛的设备,其逆变电路的开关特性,对其供电电源形成了一个典型的非线性负载。目前国内外有多种有源滤波器,这种滤波器能对频率和幅值都变化的谐波进行跟踪补偿,且补偿特性不受电网阻抗的影响。......
2023-06-19

图5.11是位置环采用P控制,速度环分别采用P和ADRC控制;图5.12是速度环采用P控制,位置环分别采用P和ADRC控;图5.13是速度环和位置环都采用ADRC控制。图5.13速度环和位置环都采用ADRC控制在双ADRC控制中,从仿真效果可以看到系统有相对较好的实时速度曲线,但双ADRC控制需要更多的计算量,这就对硬件有更高的要求。......
2023-06-24
式即为动态分析中实际求解的有限元代数方程组。由于式考虑了渗透张量与应力的耦合关系,即使采用弹性本构模型,式也是一个非线性方程组,仍需在每一个计算时步内迭代求解。当然与式相比,式消除了自由面边界非线性的影响,非线性仅来源于随应力的变化,非线性程度减弱了,因此数值分析的计算量也减小了,收敛性也可以保证。......
2023-06-28
相关推荐