图5-35 风力发电系统类型按风力发电机的转速是否恒定,风力发电系统又可分为恒速恒频风力发电系统和变速恒频风力发电系统。变速恒频风力发电系统目前被认为是性能较优的一种风电系统,可以实现转速的大范围调节,使风能利用系数保持在最佳值;同时,能吸收和存储阵风能量,减少阵风冲击对风力发电机产生的疲劳损坏、机械应力和转矩脉动,延长机组寿命,减少噪声。......
2025-09-29
目前,风力发电系统的主流为变速恒频发电系统。在变速恒频风力发电系统中,由于采用了功率变换器或变频器,无论采用哪种类型的发电机,风力发电机都能够在变速恒频下运行。通过电力电子变换装置能够使发电机和电网实现柔性连接,发电机转子的转速和电网频率得以解耦,使风力发电系统具有较宽的转速运行范围,提高了风能利用率。在变速恒频风力发电系统中,绕线转子双馈异步电动机和永磁同步电动机是迄今使用最广的两类风力发电机。下面将分别给予详细的介绍。
1.变速恒频双馈异步电动机风力发电系统
变速恒频双馈异步电动机风力发电系统通常为非直驱式风力发电系统,如图5-36所示。它由风力机、升速齿轮箱、双馈感应异步电动机以及网侧变流器和转子侧变流器构成。双馈发电机的定子绕组直接与电网相连,而转子绕组则经交流变频器后与三相隔离变压器的初级绕组连接,而变压器的次级绕组与电网相连。其中,交流变频器通常由交—直—交两级变换器构成,可以实现频率、幅值和相位的调节,且其电能可实现双向流动。当发电机工作在次同步模式时,电能从电网侧流向转子侧;而工作在超同步模式时,能量则从转子侧流向电网侧。而在定子端,能量始终流向电网。由于能量通过两个通道传输,转子变流器的额定容量比采用全功率变流器的系统要小。转子变流器的容量由风电机组的转速范围决定,大多数情况下不论哪个方向都是同步功率的1/3,由此可确定变流器的额定容量。
双馈感应风力发电系统中的网侧变流器主要用于实现直流母线电压的稳定控制,完成转子侧与电网间有功功率和无功功率的交换而转子侧变流器用于双馈发电机的转子励磁控制,实现最大风能的跟踪。
采用双馈型感应发电机时,发电机定子绕组直接接到电网上,转子上的双向功率流交流励磁变流器的另一端也接入电网。存在关系式
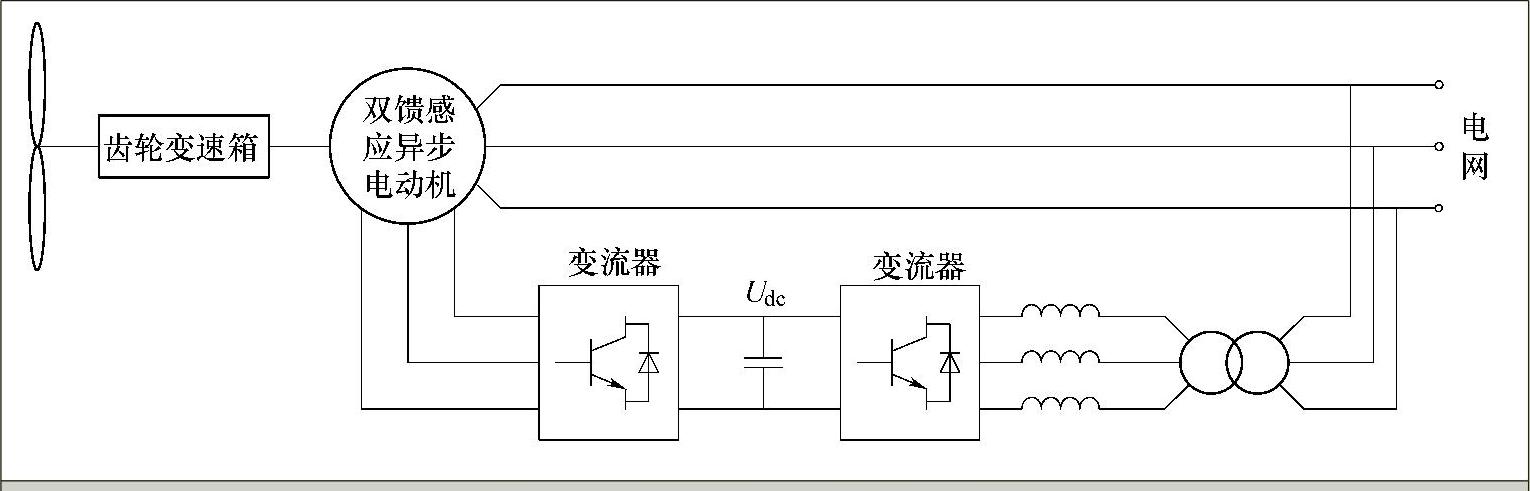
图5-36 双馈发电机并网结构简图

式中,fs为定子电流频率;p为极对数;fr为转子电流频率;n为转子转速;“+”用于亚同步转速,“-”用于超同步运行,后者要求转子绕组相序与定子相反。也就是当转子转速n变化时,可调节转子的供电频率fr,保持fs不变,即保证定子馈电频率不变,与电网一致。采用双馈感应发电机(DFIG)风电机组有如下优点:①允许原动机在一定范围内变速运行,简化了调整装置,减少了调速时的机械应力,同时使机组控制更加灵活、方便,提高了机组运行效率;②调节励磁电流幅值和相位,可分别调节发出的无功功率和有功功率,应用矢量控制可实现有功、无功功率的独立调节;③需要变频控制的功率仅是电动机额定容量的转差功率部分(典型容量30%左右),使变频装置体积减少,成本降低,投资减少。
(1)发电机数学模型
双馈异步发电机的定子绕组端电压us等于定子绕组全部感应电动势减去电阻电压降,转子绕组外加电压应与转子绕组反电势和电阻电压降平衡,由此可得到定子三相绕组电压平衡方程为

转子三相绕组电压平衡方程为

式中,ψsa、ψsb、ψsc,usa、usb、usc,isa、isb、isc和ψra、ψrb、ψrc,ura、urb、urc,ira、irb、irc分别是定子、转子绕组的磁链、电压、电流;Rs、Rr分别是定子和转子绕组的电阻。
利用Park变换,可将三相静止坐标系中的电压、磁链、电流变换为d、q坐标系下的电压、磁链、电流,将定子绕组a、b、c坐标系的电压方程和转子绕组的电压方程变为d、q旋转坐标系下的电压方程,并能建立图5-37所示的异步电动机动态等效电路模型。
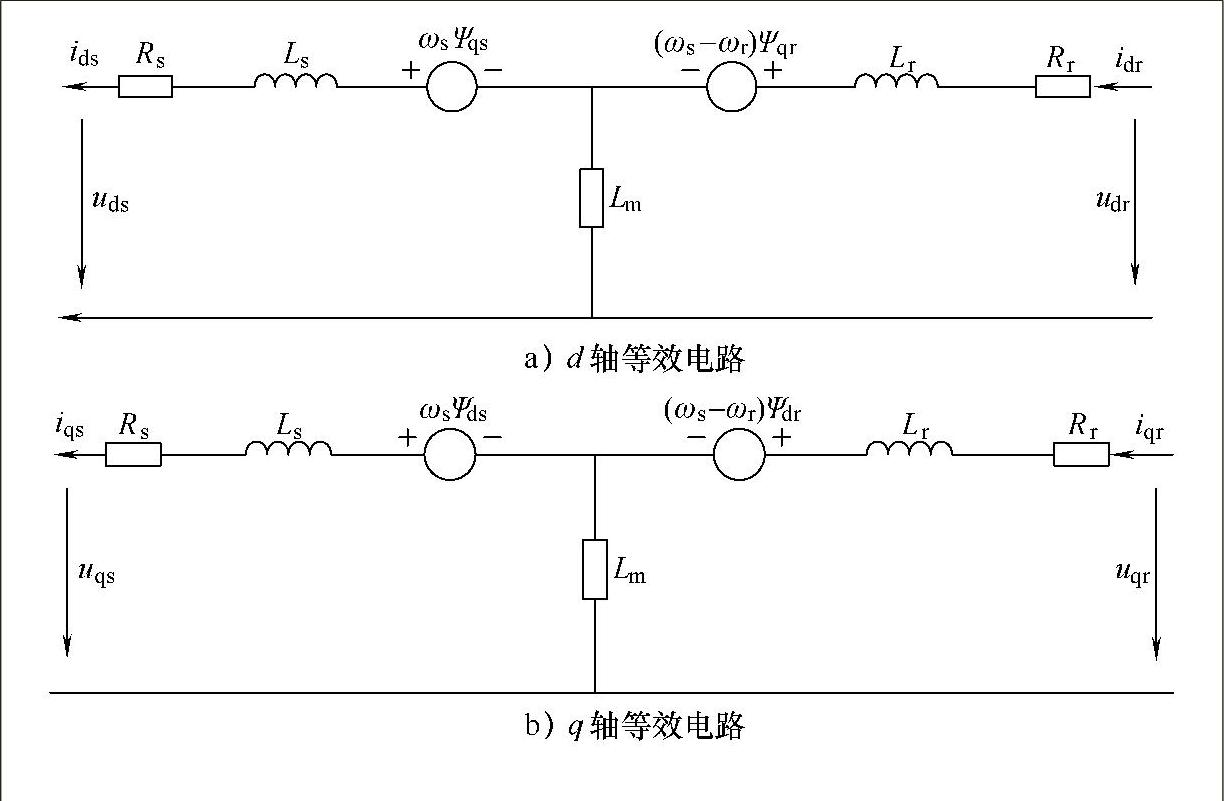
图5-37 异步电动机动态等效电路模型
定子侧在d、q坐标系下的电压方程为

转子绕组电压方程为

在三相静止坐标系中,电动机定子磁链ψs、转子磁链ψr都是由定子三相交流电isa、isb、isc和转子三相电流ira、irb、irc共同产生的。而在d、q轴坐标系下的定子、转子磁链ψds、ψqs、ψdr、ψqr分别由d轴和q轴的定子、转子电流产生,d轴电流不产生q轴磁链,q轴电流不产生d轴磁链。其中,uds、uqs、udr、uqr分别为定子和转子的d轴和q轴电压;ωs为定子磁场转速;ωr为转子转速。
定子d轴磁链
ψds=Lmidr-Lsids (5-49)
定子q轴磁链
ψqs=Lmiqr-Lsiqs (5-50)
转子d轴磁链
ψdr=-Lmids+Lridr (5-51)
转子q轴磁链
ψqr=-Lmiqs-Lriqr (5-52)
Lm是d、q坐标系中同轴的定子与转子绕组之间的互感;Ls、Lr是定子、转子绕组自感;Lsσ、Lrσ是定子、转子绕组的漏感,因而有
Ls=Lsσ+Lm (5-53)
Lr=Lrσ+Lm (5-54)
下面介绍功率、转矩与运动方程。
在两相旋转坐标系中,定子输出的三相有功功率Ps和无功功率Qs为

在两相旋转d、q坐标系中,双馈发电机的转子磁场与定子电流所产生的电磁转矩Te为

(2)双馈风力发电机的控制
DFIG系统的控制主要通过对变流器的控制完成。双馈风力发电系统控制包括功率流和MPPT控制、并网电能质量控制等,如PWM控制、驱动和保护等。此外,还包括介于线路和系统之间的控制策略等,如电压和电流闭环控制等,所有这些功能、策略和控制方法都能归结到DFIG系统的转子侧和网侧变流器的控制上。
首先,仔细分析一下转子侧变流器的控制。双馈发电机的控制经历了标量控制、矢量控制、直接转矩控制及智能控制等阶段。转子侧变流器的控制对象是双馈感应发电机DFIG的有功、无功和电磁转矩等控制。定子电压即电网电压一般不变,可控制量是转子电压,直接用作控制变量的是转子电流。
矢量控制中可选取的定向矢量很多,如定子电压矢量、定子磁链矢量、气隙磁链矢量及电网虚拟磁链矢量等,最常用的是定子电压定向矢量和定子磁链定向矢量控制。
变速恒频双馈异步发电机的控制包括两个控制系统:一是按定子磁链ψs定向控制转子侧变流器,使其输出频率为fr、电压为ur、电流为ir的三相交流电,对转子绕组供电,实现电动机在给定速度ωN∗(或功率Ps∗或电磁转矩Te∗)和无功基准Qs∗下的变速恒频运行,如图5-38所示。
当同步旋转坐标系的d轴定向于定子磁链矢量ψ时,即为定子磁链定向矢量控制,此时有
ψsq=0 (5-58)
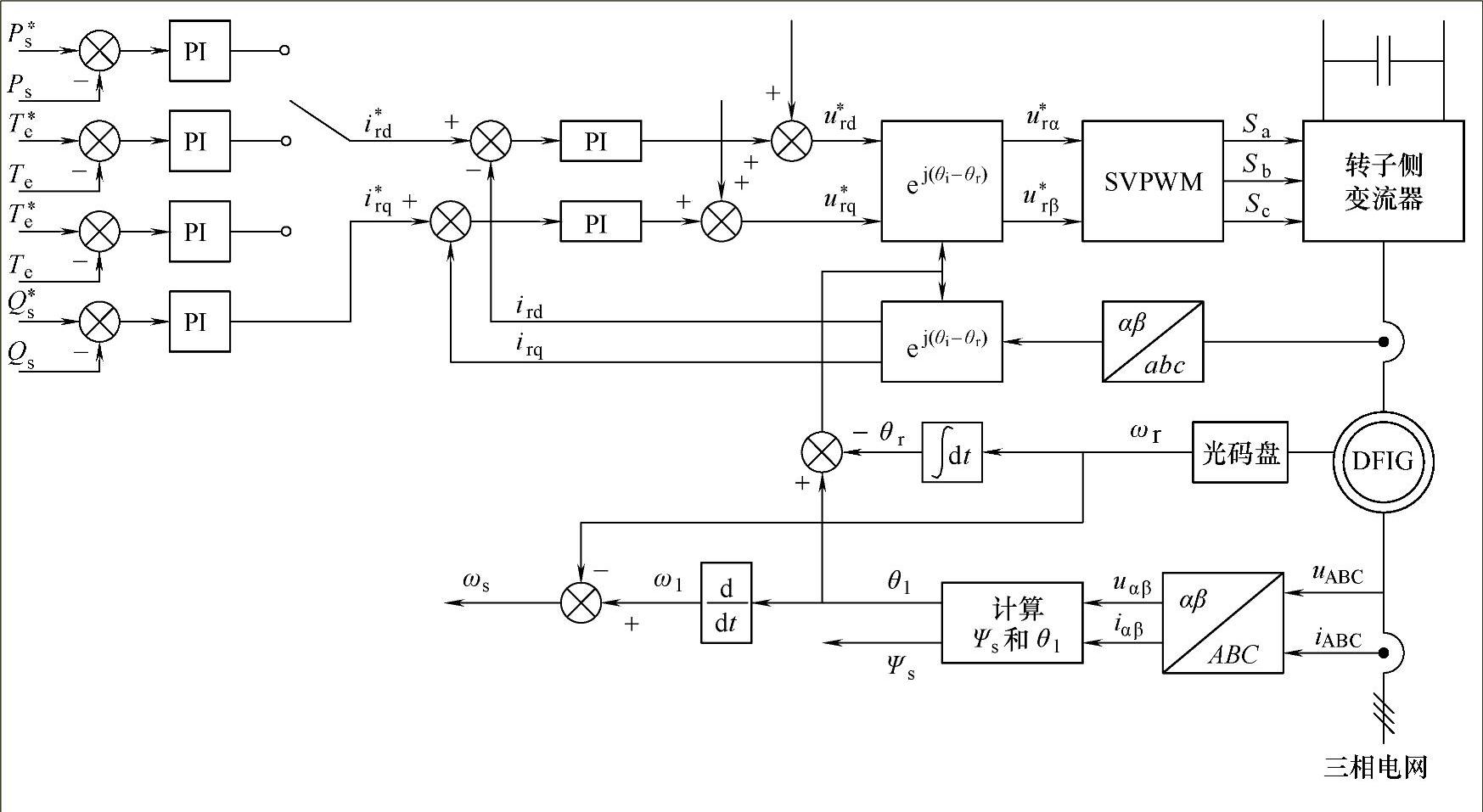
图5-38 基于定子磁链定向的DFIG矢量控制转子电流闭环控制框图
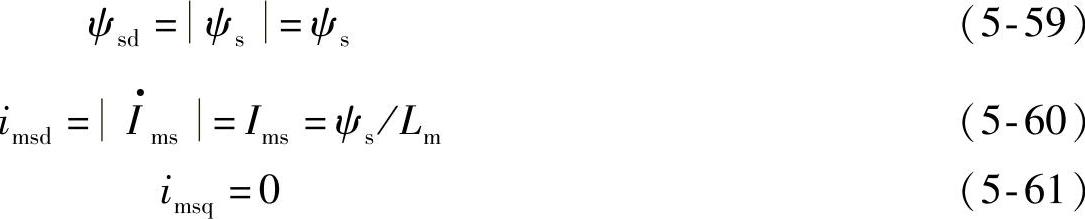
式中,ψs为定子磁链矢量的幅值;Ims为定子励磁电流矢量的幅值;Lm为励磁电感值。
在电网电压恒定的情况下,ψs和Ims可以看作常量。根据系统方程可得到电磁转矩Ts、定子侧有功功率Ps和无功功率Qs分别为
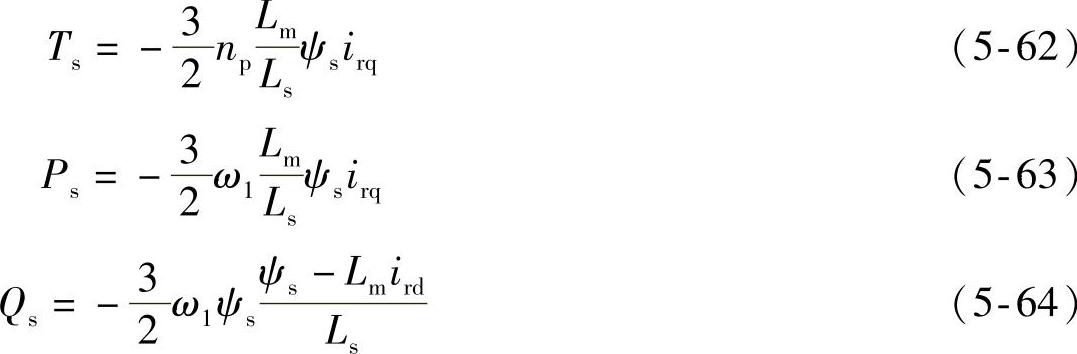
其中,定子磁链幅值ψs及其角度θ1可由定子电压、电流来观测,即
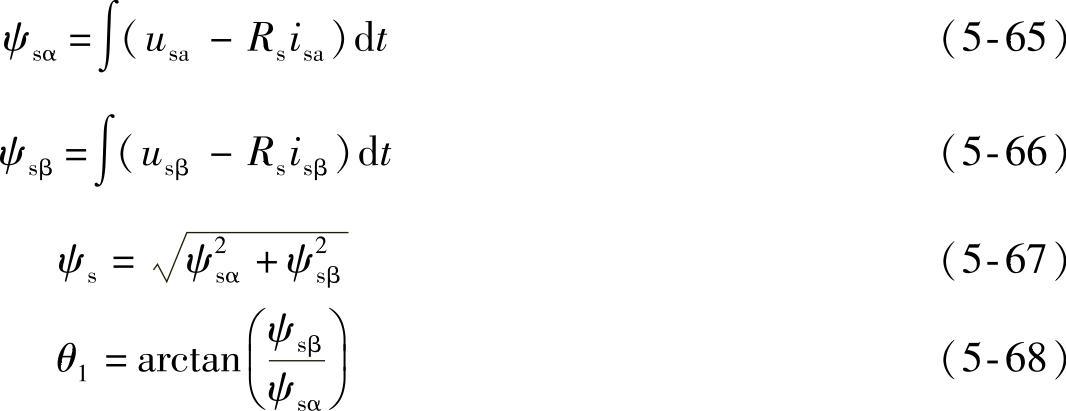
实际中,往往用低通滤波器代替纯积分计算,以免因初值等引起直流偏置。转子交流励磁方程为
 (https://www.chuimin.cn)
(https://www.chuimin.cn)
式中

式中,σ为漏磁系数;ωs为转差频率。
由上式可知,只要转差不为零,控制具有耦合性,采用前馈或反馈的方法可以实现解耦。
可见,通过转子电流的控制,完全可以达到控制DFIG有功、无功和电磁转矩的目的。根据上述式子,可得到图5-38所示的转子电流环控制的框图。
在定子磁链定向的矢量控制系统中,由于要观测定子磁链,因而控制复杂。采用定子电压矢量定向的DFIG控制则可以使这一过程简化。这是因为,在忽略定子电阻Rs的情况下,定子电压矢量与定子磁链矢量之间存在近似关系
us=Rsis+jω1ψs≈jω1ψs (5-72)
其具体过程与磁场定向法基本一致。
对于网侧变流器的控制,其主要功能是保持直流母线电压的稳定,控制输入功率因数和输入电流正弦波的畸变程度。控制直流母线电压稳定,实际上就控制了交流侧与直流侧的有功功率平衡。由于电网电压基本恒定,所以实际上是对被控量变流器输出交流电压进行控制。根据坐标变换的功率分析可知,将交流侧电流的有功和无功分量作为直接控制量,可分别达到控制有功功率和无功功率(功率因数)的目的。而输入电流波形畸变程度则是电能质量的问题,与电路结构、调制方法、电路参数等有关。一般地,网侧PWM变流器控制框图如图5-39所示。它由两个控制环组成,一个是直流电压外环,另一个是电流内环。各种控制方式中,电压外环控制器基本相同,电流内环各有不同。
根据图5-39中的网侧变流器结构,在d、q旋转坐标系下,变流器交流侧电压方程为

由式(5-73)和式(5-74)可以看出,d、q轴电流除受控制量udr、uqr的影响外,还受到交叉耦合项(等号右侧第二项)和电网电压的影响。同样,可以采用反馈和前馈的方法进行解耦。一种基于定子电压矢量定向(ud=us,uq=0)的网侧变流器解耦双环控制策略如图5-39所示。
双闭环结构的外环为电压环,内环为电流环。直流环节给定电压udc∗和反馈电压udc的误差经PI调节器调节输出id∗,而iq∗则由功率因数决定,单位功率因数控制时,iq∗=0。它们分别与反馈值id、iq的误差同样经过PI调节后输出ud′、uq′,再与各自的解耦补偿项Δudr、Δuqr和电网电压扰动前馈补偿项ud、uq(图中ud=us,uq=0)相运算后得到变流器交流侧参考电压udr∗、uqr∗。此后,udr∗、uqr∗经过坐标变换后得到αβ系分量uαr∗、uβr∗,再由SVPWM调制,最后产生驱动信号实现对网侧变流器的控制。
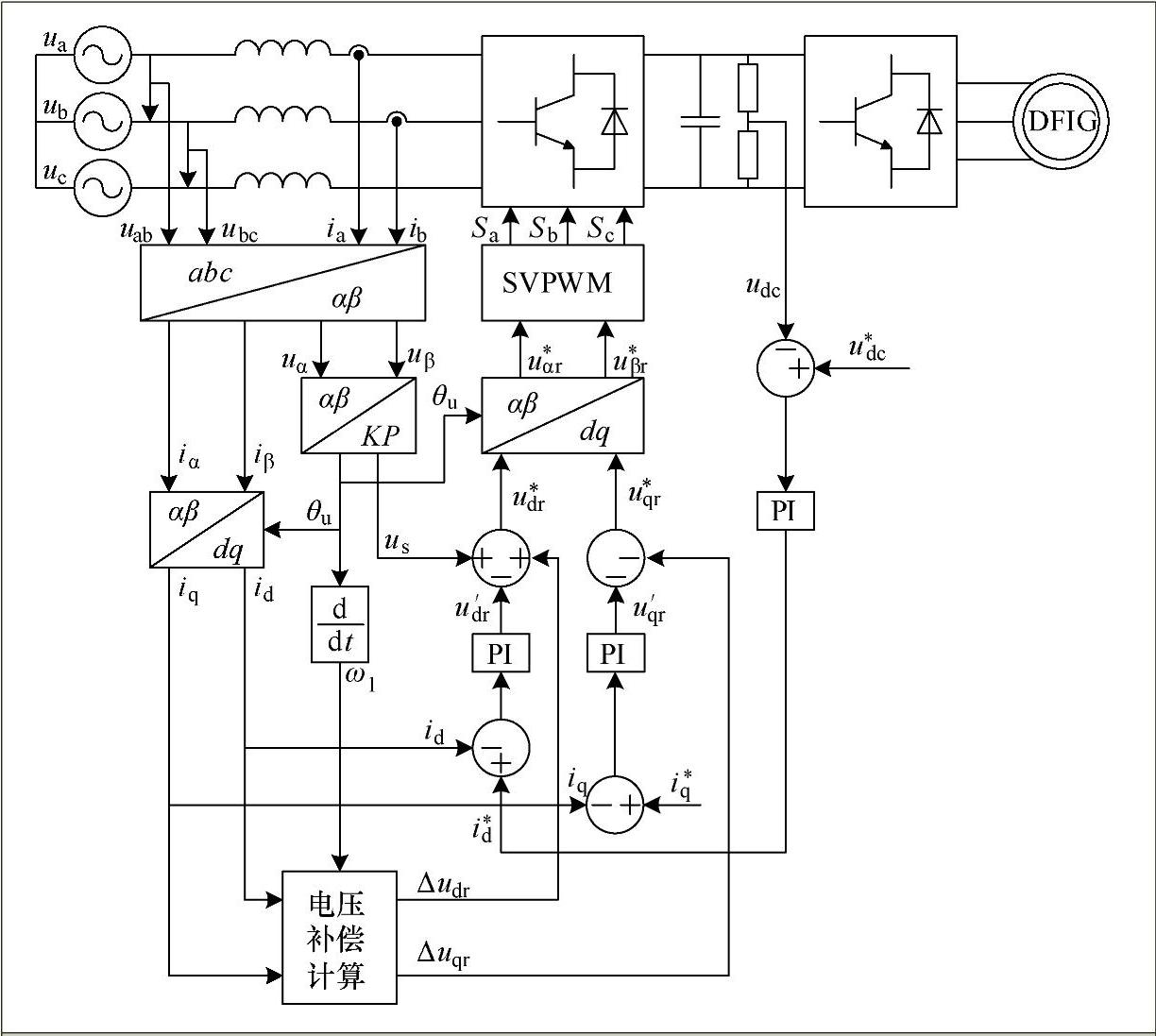
图5-39 基于定子电压矢量定向的网侧变流器解耦双环控制框图
2.永磁直驱风力发电机
永磁同步风力发电机(Permanent Magnet Sychronous Generator,PMSG)是一种由永磁材料励磁的同步电动机,可以采用多极结构。电动机转速很低,在无须齿轮增速机构的条件下便可与风力涡轮机的速度配合运行,此时称为低速直驱式PMSG,由此组成的一个并网系统结构如图5-40所示。
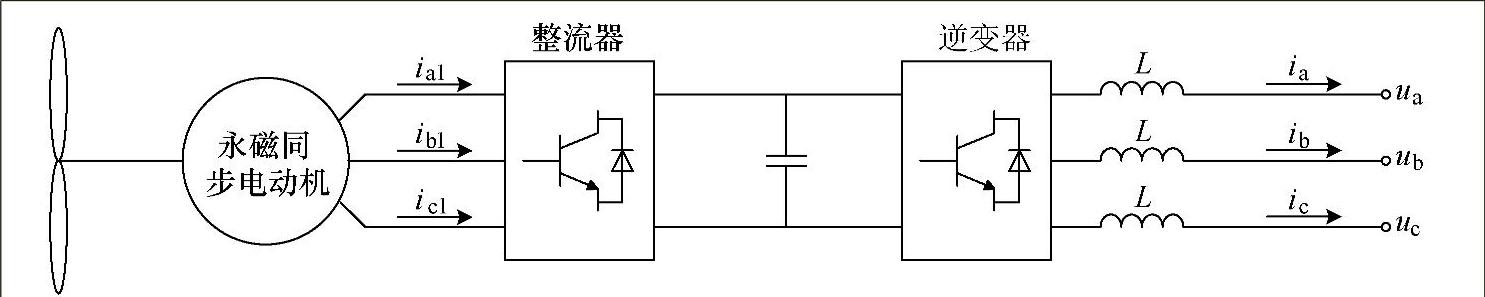
图5-40 永磁直驱风力发电机并网结构简图
结合全功率电力电子变流器,这种风力发电技术是目前重要的变速恒频风力发电技术之一,具有如下特点:
1)属于变速恒频类型,有效发电风速范围宽。
2)永磁励磁,无须励磁变流器,电效率高。
3)外转子结构,无须集电环,寿命长。
4)全功率变换,有功和无功完全控制。
5)多极式低速直驱,可减少齿轮箱环节,能量传输效率高、维修量少。
当然,低速PMSG电动机大而重,制造技术要求高,运输难度也大,目前我国尚不能制造大功率直驱PMSG。此外,低速PMSG系统还需要全功率变流器,永磁材料也必不可少。
低速直驱PMSG中的变流器主要功能是在较宽风速范围内,将风力机所发出的能量馈入电网,实现最大功率点跟踪,机网两侧功率因数等电能质量控制。此外,还要求变流器高效、可靠和长寿命。与DFIG中的变流器仅承担部分功率不同,PMSG中的变流器是全功率变换,功率大,因此在大型系统中的技术瓶颈效应明显。
多数应用于低速直驱PMSG中的变流器是交—直—交结构,其并网逆变部分大多数采用PWM逆变器方式。据此可分为不可控整流、不可控整流+Boost升压电路、可控整流和四象限双PWM交—交变频器等。
基于IGBT的双PWM交—直—交变流器具有如下特点:
1)机侧和网侧都采用可控器件,能量可以双向流动,具备四象限运行能力。
2)机侧变流器实现PWM整流,电流为正弦波、功率因数可以接近于1。
3)PWM整流可同时实现升压、MPPT功能,电路结构简化、变换效率高。
4)发电机发出的功率不论风速或电压高低,均能馈入电网。
5)发电机侧和电网侧可解耦控制。
6)在切入风速附近,同步发电机可作电动机运行,可以避免风机停止转动。
当然,采用全控开关的双PWM变流器成本更高。
多数风力发电并网变流器电压较低,如690V。这为越来越大的单机容量和大型风电场高效率变流器及电动机设计带来困难。
交—直—交高压并网变流器可以采用IGBT、IGCT或GTO,更大功率采用晶闸管SCR等开关器件,图中所示为IGCT,适合中大功率应用。其特点是:采用三电平变换技术,变流器输出电压高、波形品质好,直流环节电容容量低,系统效率较高。
以低速PMSG用双PWM变流器为例,其控制包括机侧和网侧变流器的控制。机侧变流器是以电动机作为控制对象,主要完成发电机能量的输入变流和电磁转矩控制。
PMSG在d、q旋转坐标系下的电压矢量方程和电磁转矩分别为
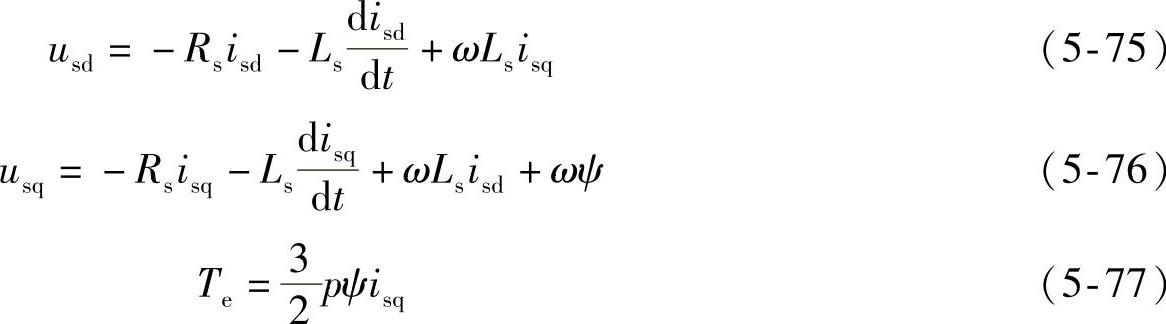
式中,Ls、Rs是发电机的感抗和阻抗;ω是电动机的转速;ψ是磁链。
可见,变流器机侧交流电压和电动机电磁转矩通过电流控制实现。式(5-75)~式(5-77)分别是机侧变流器矢量控制和转矩控制方程。图5-41所示为机侧变流器的控制框图。
除矢量控制外,也可以采用直接转矩控制,即通过转矩、磁链邦邦(bang-bang)控制确定逆变器的开关状态。这种方法计算简单,对数字控制系统计算要求较低。类似地,直接功率控制也具有较好的控制性能。
类似地,网侧变流器矢量(电压定向ud=us,uq=0)和功率控制方程分别为

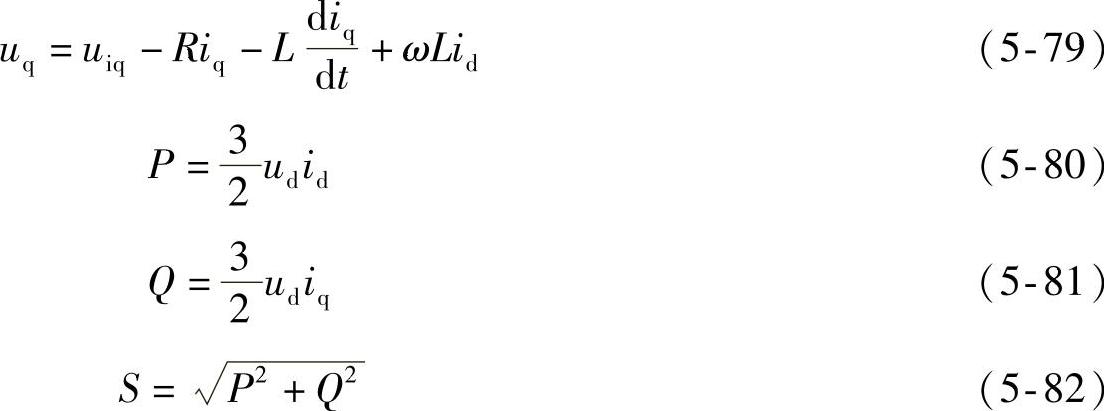
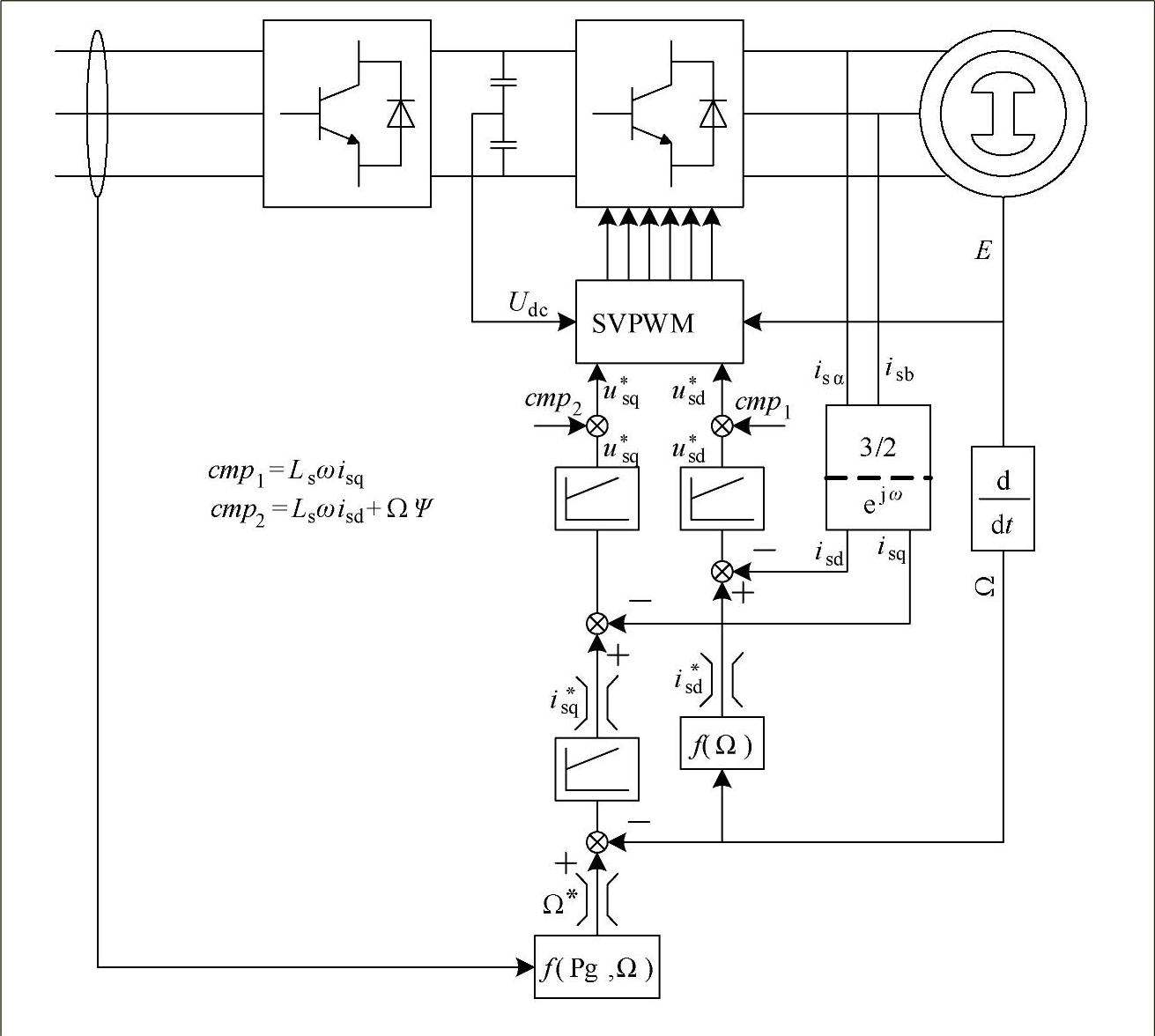
图5-41 机侧变流器控制框图
双PWM变流器中,直流环节电容电压udc是电动机侧输入功率和网侧输出电网功率平衡的结果,可通过有功电流分量id控制。当发电机侧发出的电能增加时,直流环节电压升高,电压调节器输出指令id∗增大,网侧逆变器向电网馈入更多的电能;反之,id∗减少和向电网馈能,甚至自网侧吸收一定能量,直流环节电压升高,使直流电压维持恒定。输入/输出功率达到平衡时,id趋于稳定。
控制q轴电流分量iq可以控制网侧变流器吸收的无功功率,从而可以控制其交流侧的功率因数。因此,可以根据需要的功率因数确定q轴参考电流iq∗。当进行单位功率因数控制时,应该令iq∗=0。网侧变流器控制框图如图5-42所示。
网侧变流器控制系统为双闭环结构。外环为电压环,内环为电流环。直流环节给定电压udc∗和反馈电压udc相比较后的误差经PI调节器调节输出id∗,而iq∗则由功率因数的性质决定。id∗、iq∗分别与对应的反馈值id、iq相比较后的误差经过PI调节器调节后输出uq∗、ud∗,参考信号经过坐标变换后,由此进行SVMPWM调制,产生驱动信号,从而实现对网侧变流器的控制。
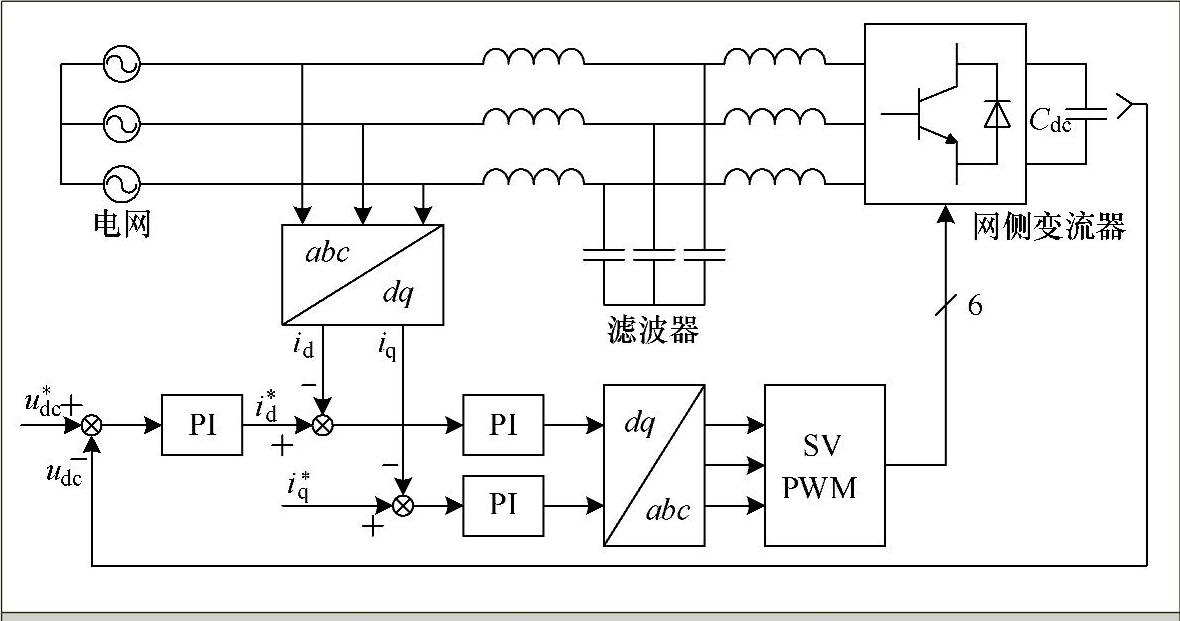
图5-42 网侧变流器控制框图
相关文章

图5-35 风力发电系统类型按风力发电机的转速是否恒定,风力发电系统又可分为恒速恒频风力发电系统和变速恒频风力发电系统。变速恒频风力发电系统目前被认为是性能较优的一种风电系统,可以实现转速的大范围调节,使风能利用系数保持在最佳值;同时,能吸收和存储阵风能量,减少阵风冲击对风力发电机产生的疲劳损坏、机械应力和转矩脉动,延长机组寿命,减少噪声。......
2025-09-29

在液压系统中,用于控制液体的流动方向、压力高低和流量大小的元件称为液压控制阀。液压控制阀按其作用的不同可分为3 大类:①方向控制阀控制液体的流动方向和液流通断的阀类,以实现执行元件运动方向的变换。控制阀是液压系统的一个重要组成部分,通过它才能使液压系统按人们的意志去完成各种动作。本章着重介绍控制阀的结构、工作原理、性能特点及其应用场合,简单介绍阀的常见故障及排除方法。......
2025-09-29

图8-9 大包加盖装置结构图2.大包包盖液压控制原理大包加盖及液压缸驱动旋转原理如图8-10所示。包盖升降使用电磁换向阀1控制,使用双单向节流阀3实现回油节流调速,控制和调节液压缸动作速度。平衡阀2的另外一个功能就是在软管发生爆裂时,阀芯及时关闭油路,使包盖停止动作,以防止包盖失控。......
2025-09-29

空调器的电气系统主要是用于调控空调器的工作状态,以满足人们对室内空气环境的要求。空调器的电气系统常有不同的控制方式。在家用窗式和分体式空调器中,压缩机中的电动机多为单相异步电动机,而在容量较大的柜式空调器中则常用三相异步电动机。继电器在空调器的电气系统中,继电器主要用于接通或断开某一设定的供电线路或某一功能的控制电路。......
2025-09-29

双馈发电机用于风力发电,较同步发电机其风力机转速可以有较宽的变化范围,有利于风力机的最佳输出功率追踪,提高风能利用效率,是目前国内外大功率风力发电机组的主流机型。双馈发电机风力发电系统转子交流励磁电源频率为转差频率,低于发电机定子电源频率,因此可以使用由晶闸管组成的AC-AC变流器,或由IGBT组成的双PWM控制AC-DC-AC变流器。图8.8 电网电压定向控制由双PWM控制变流器组成的双馈发电机主电路如图8.9所示。图8.9 双馈发电机主电路......
2025-09-29

系统切换是指冗余CPU判断是否需要进行系统切换之后自动切换控制系统与待机系统,包括控制系统异常时的切换和由网络模块的系统切换请求而进行的切换。......
2025-09-29

在各种控制系统中可以采用不同的逻辑控制装置,实质上就是不同的控制器件。现在常见的控制装置主要有继电器装置、可编程序控制器装置和微机装置。电气控制系统无论控制装置如何改变,整个系统组成基本上都是一致的,主要有四个部分。(二)中间处理部分主要包含所有的中间控制器件,如各种中间继电器、可编程序控制器、专用微机等。这是电梯控制系统中各种操作的实际执行部分。......
2025-09-29
伺服控制系统是一种能够跟随输入指令信号进行控制的系统,也称随动控制系统。位置伺服控制系统用于机械的定位和定向控制,机器人、数控机床、雷达跟踪、舰船操舵等都大量使用电动机控制的位置伺服系统。位置闭环控制与调速系统的不同是其有位置检测和位置控制器。本章主要介绍步进电动机位置开环控制原理和伺服电动机位置闭环控制系统的组成和控制要求。......
2025-09-29
相关推荐